基于地磁车辆检测器的测速系统研究
2019-02-22李坤
李 坤
(中国船舶重工集团公司第七一〇研究所,湖北 宜昌 443003)
0 引 言
当前国内外主流的车辆测速系统主要有地感线圈测速、视频测速、雷达测速和地磁式车辆检测器测速[1,2].
地感线圈测速是在道路上沿着车辆前进方向埋设两个线圈,根据线圈间的距离和车辆经过线圈的时间差得出速度[3],该方法准确度高,但安装线圈时会破坏路面,且线圈寿命一般较短[4]; 视频测速是对摄像机拍摄的图形进行图像处理、目标检测和跟踪,从而计算出速度[5,6],这种方式在测速的同时可以记录车辆违章的动态过程,记录的信息最丰富,便于取证,缺点是视频对使用环境要求很高[7],天气变化会大大降低测速效果; 雷达测速主要是基于多普勒效应[8],当目标物体移动时,雷达发射的电磁波与经过物体反射后的电磁波会有频率上的偏移,由频率的改变数值,计算出目标与雷达的相对速度[9],雷达测速是在同一行车方向上安装一个检测点,当同一方向上并排行驶多个车辆时,雷达测速装置无法分辨,容易出现漏检或误检[10,11].
地磁式车辆检测器测速是近年来出现的一种新型测速方式,基于磁阻传感器的车辆检测器可以准确检测车辆的进入和离开,在道路中央沿着行车方向前后埋设两个车辆检测器,通过两个车辆检测器间的距离和车辆通过时的时间差,可以计算出速度[12,13]. 该地磁车辆检测器测速系统体积小,成本低,安装快捷,使用方便.
1 系统组成
测速系统主要由地磁车辆检测器、中央控制器和应用系统组成,如图 1 所示.

图 1 测速系统组成Fig.1 Composition of the speed measuring system
在车道中央沿着行车方向间隔一定距离一前一后埋设两个地磁式车辆检测器,检测器定时检测车辆的进入和离开,并实时发送给中央控制器,中央控制器根据收到的信息计算出经过车辆的平均速度,发送给后端应用系统,可用于交通信息综合管理平台,超速抓拍,交通诱导等领域.
2 车辆速度检测原理
如图 1 所示,在车道中央沿着行车方向间隔一定距离的A点和B点,分别埋设1号和2号车辆检测器,A点和B点间距离为LAB.
地磁式车辆检测器是基于车辆经过引起磁场变化的原理进行探测车辆的,本系统中的车辆检测器采用了两两正交的三轴磁场检测,将三轴的磁场变化量的均方跟值与设定的阈值进行比较,从而判定有车还是无车,有车输出1,无车输出0,当有状态变化时,车辆检测器会实时地将状态信息发送给中央控制器.
本系统使用的车辆检测器采用的是浮动阈值自适应车辆检测算法,车辆检测器共有高低两个阈值,检测车辆由无到有时采用的是高阈值,而检测车辆由有到无时采用的是低阈值,采用浮动阈值算法可以显著提高车辆检测的准确率. 目前国内外存在的车辆检测器大多采用了单一的阈值,存在很大的弊端,当单一阈值设置的较高时,容易将出租车、公交车等中间部位铁磁物质较少的车辆检测成多辆,发生多检; 当单一阈值设置的较低时,容易在相邻车道有大车经过时误触发,产生多检,或者在前后跟车很近时将其检测成一辆,产生漏检.

图 2 某出租车经过双检测器时的信号示意图Fig.2 Signal diagram of a taxi passing through a double detector
图 2 为某出租车经过双检测器时的信号示意图,车辆检测器的高阈值为阈值1,低阈值为阈值2. 1号检测器检测到车辆进入时刻为t1进,车辆离开时刻为t1离,2号检测器检测到车辆进入时刻为t2进,车辆离开时刻为t2离. 由此可得车辆进入的时间差为式(1),车辆进入的平均速度为式(2).
Δt进=t2进-t1进,(1)

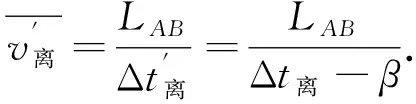
同理,车辆离开的时间差为式(3),车辆离开的平均速度为式(4).
Δt离=t2离-t1离,(3)

平均速度为
(5)
检测器为了记录车辆进入和离开的时刻需要有高精度的时钟芯片,本系统中的车辆检测器为了实现低功耗和节约硬件资源,没有使用时钟芯片,而以中央控制器内的高速定时器为时间基准,检测器实时地将车辆进入和离开信息发送给中央控制器,中央控制器接收到1号检测器发送的车辆进入信息后启动计数器1开始计数,接收到1号检测器发送的车辆离开信息后启动计数器2开始计数,接收到2号检测器发送的车辆进入信息后计数器1结束计数,接收到2号检测器发送的车辆离开信息后计数器2结束计数,这样同样可以得到车辆进入和离开的时间差.
3 算法研究与实现
车辆进入的时间差和离开的时间差以及车速计算均在中央控制器端上进行. 车速检测算法如图 3 所示.
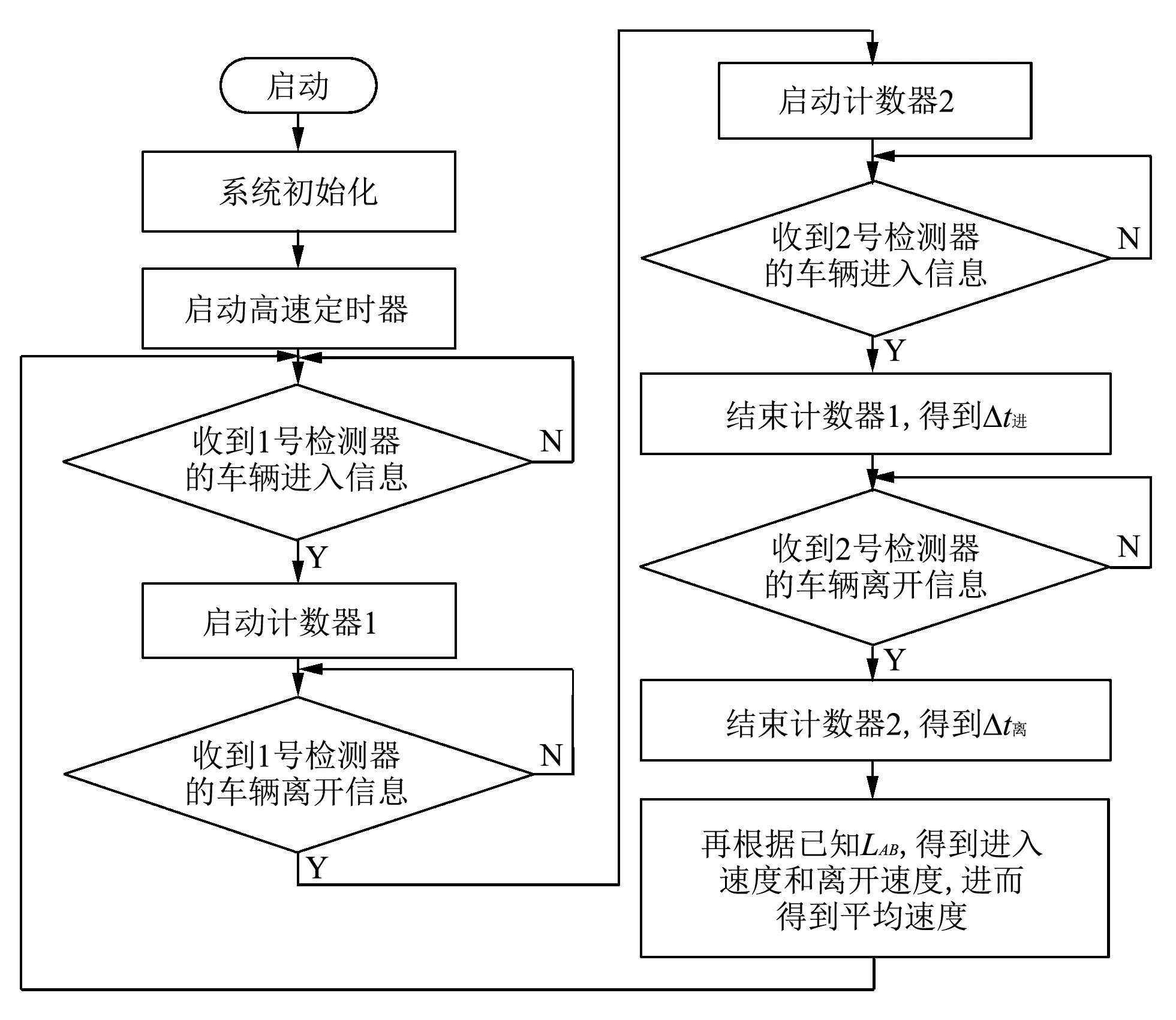
图 3 车速检测算法流程图Fig.3 Vehicle speed detection algorithm flow chart
4 试验结果与误差分析
4.1 测速试验
测速试验中同时部署了两组测速系统,每组测速系统中前后车辆检测器的间隔为6 m,车辆检测器采样频率为10 Hz.
测速试验的实际车速、测量车速和误差见表 1,其中实际车速为车辆仪表盘上显示的车速. 两组测速系统,共42组测试数据,最大误差为23.33%,误差绝对值的平均值为5.49%,最大误差较大,平均绝对误差较小.

表 1 测速试验的详细数据
4.2 超速抓拍试验
超速抓拍试验中部署了一组测速系统,前后车辆检测器间隔为6 m,采样频率10 Hz,当车速超过60 km/h时,启动高清相机进行抓拍. 测试车辆速度约为70 km/h,如图 4 所示.

图 4 超速抓拍测试现场Fig.4 Speed capture test site
进行了多组超速抓拍试验,每次均能正常启动抓拍,如图 5 所示. 但从图 5 中可以看出抓拍的位置不同,一致性有待提高.

图 5 超速抓拍结果Fig.5 Result of Speed capture
4.3 试验结果分析
通过测速试验和超速抓拍试验可以看出,该车辆测速系统的精度有待提高. 通过深入分析检测原理可以发现影响测速精度的主要因素包括:车辆检测器灵敏度、车辆检测器采样频率、车辆检测器到中央控制器的无线信号传输延时和两个车辆检测器之间的距离.
4.3.1 车辆检测器灵敏度

(6)

理想的进入平均速度、离开平均速度分别为
(8)
平均速度为

由此可见,车辆传感器所使用的磁阻传感器的灵敏度差异以及安装的方向高度等差异都会带来测速的误差. 为了提高测速精度,应尽量选择一致性好的磁阻传感器,车辆检测器安装的方向和高度也应尽量一致.
4.3.2 车辆检测器采样频率

(11)

理想的进入平均速度、离开平均速度分别为
(13)

平均速度为
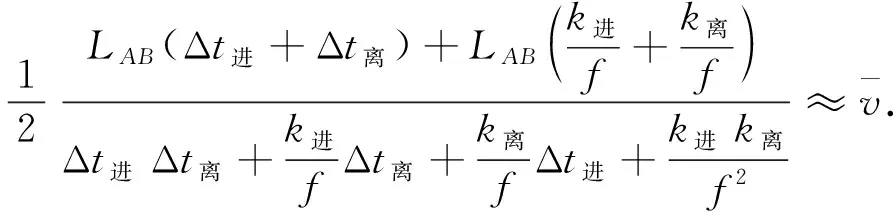
偏差影响因子在-1到1的范围内是随机的,由式(15)可见采样频率越大,误差越小. 为了提高测速精度,应提高采样频率.
4.4 改进措施
由4.3.2的分析可知,为了提高测速精度,应尽量选择一致性好的磁阻传感器,车辆检测器安装的方向和高度也应尽量一致,车辆检测器的采样频率也应尽量高. 为了避免无线信号传输上的延时差异造成的测速误差,可在每个车辆检测器上设计时钟电路,并定期进行时钟同步[7],车辆检测器发送给中央控制器的信号自带时间信息,由式(1)和式(3)确定进入时差和离开时差. 此外,增加A,B点间的距离,也能减小灵敏度和采样频率带来的误差.
5 结 论
本文研究了基于地磁车辆检测器的测速系统,与当前存在的其他常用测速系统进行了对比,明确了基于地磁车辆检测器的测速系统的优势,并进行了测速试验和超速抓拍试验,实验结果证明了该测速系统的有效性,通过对测速误差进行理论分析,提出了改进措施,下一步研究工作将是提高测速精度,使该系统具有更大的应用价值.