嫦娥四号任务圆满成功,首次实现人类航天器在月背软着陆
2019-02-19庞之浩
庞之浩 王 东
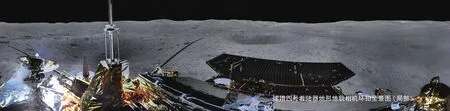
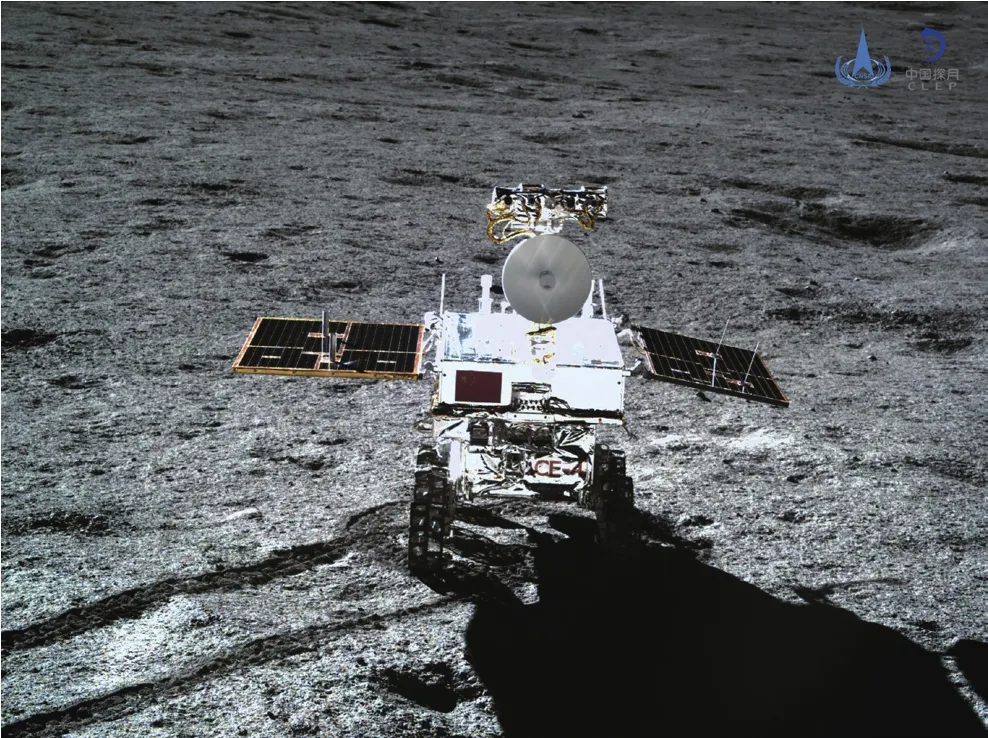
嫦娥四号着陆器地形地貌相机环拍全景图(局部)
2018年12月8日02:23,我国用长征三号乙运载火箭成功发射了嫦娥四号落月探测器,直接将嫦娥四号送入近地点200km、远地点约4.2×105km的地月转移轨道。它飞行了26天后,于2019年1月3日10:26成功着陆于月球背面177.6°(E)、45.5°(S)附近的预选着陆区——月球南极-艾特肯盆地(South Pole-Aitken Basin)内的冯·卡门撞击坑(Von Karman Crater),并通过“鹊桥”中继星传回了世界第一张近距离拍摄的月背影像图,成为世界第一个在月球背面软着陆和巡视探测的航天器,并实现世界首次月背与地球的中继通信。1月11日8:00,着陆器上的地形地貌相机完成了环拍。1月11日16:47,嫦娥四号着陆器与玉兔二号巡视器工作正常,在“鹊桥”中继星支持下顺利完成互拍,嫦娥四号任务圆满成功,进入科学探测阶段。至此,我国探月工程取得“五战五捷,连战连捷”。
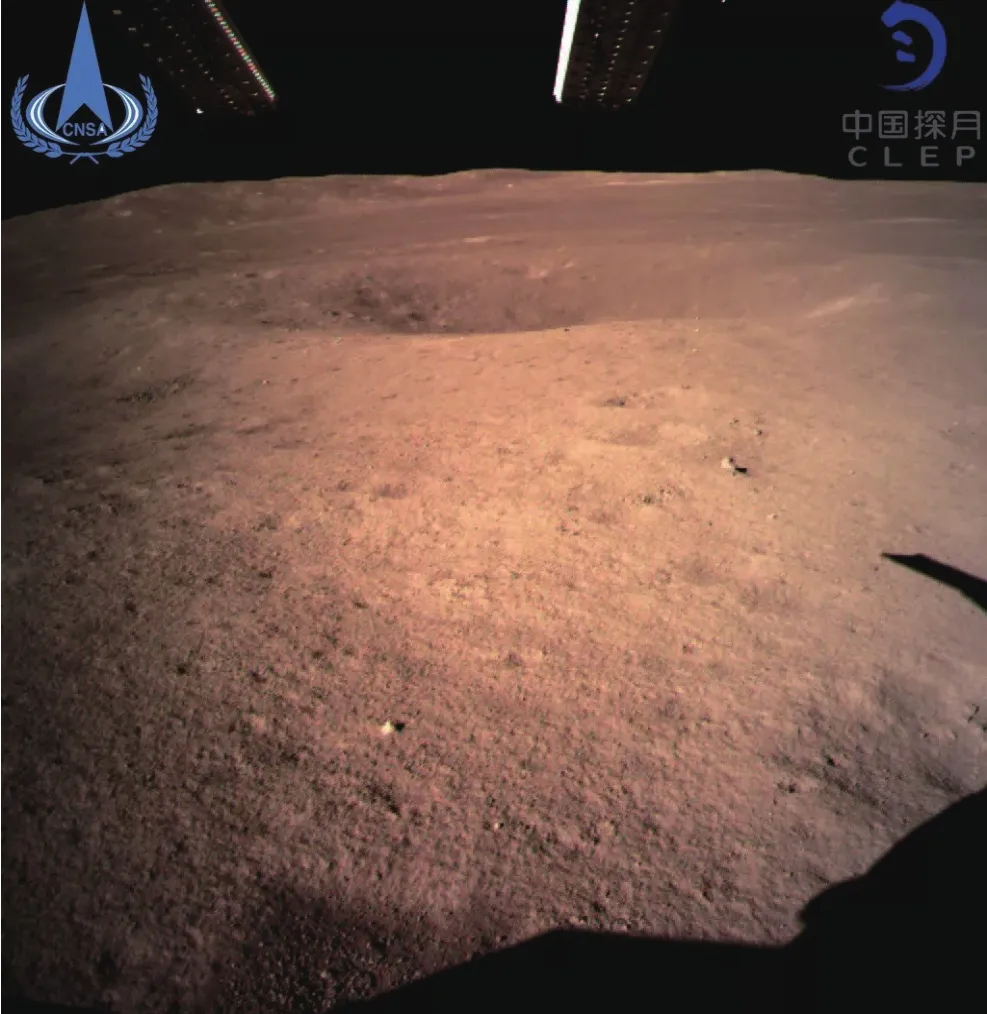
嫦娥四号着陆器拍摄的着陆点南侧月球背面图像,巡视器将朝此方向驶向月球表面

1 在月球背面着陆的意义
由于月球背面比正面保留着更多的原始状态,因此探测月球背面对研究月球甚至地球的早期历史具有重要价值。另外,因为月球的自转与公转周期一样,在地球上永远看不到月球背面,所以在月球背面可屏蔽来自地球的各种无线电干扰信号,监测到在地面和地球附近的太空无法分辨的宇宙中的低频射电信号。
不过,正是由于在地球上永远看不到月球的背面,所以在月球背面着陆的探测器不能直接和地球站进行无线电通信。为此,我国于2018年6月14日先把“鹊桥”中继星送入地月拉格朗日2点(简称地月L2点)的晕轨道,可为在月球背面着陆的嫦娥四号与地球站之间提供通信链路,传输测控通信信号和科学数据。
除了具有中继地月信号的功能以外,在“鹊桥”中继星上还装载了荷兰的低频射电探测仪(NCLE)。它能与位于荷兰境内的低频天文阵列等地面天文观测设施联合,首次开展4.3×105~4.6×105km基线的地月空间甚长基线干涉测量实验。它还能与嫦娥四号着陆器上中方研制的低频射电频谱仪之间形成干涉测量,有望对来自宇宙黑暗时代和黎明时期的辐射进行探测,研究在宇宙大爆炸后如何摆脱黑暗,点亮了第一颗恒星。
另外,“鹊桥”上携带了一个大孔径激光角反射镜。它能配合地面激光发射望远镜和激光接收望远镜,进行精度优于15mm的单程测距。这是人类历史上最远距离的纯反射式激光测距试验,达4.6×105km,可使人类激光测距的纪录再增加约8×104km。
2 月背着陆点的科学价值
嫦娥四号的着陆区选在月球背面南极-艾特肯盆地内的冯·卡门撞击坑内,这是因为该撞击坑具有较高的科学探测价值,且地势较为平坦,可以同时满足科学和工程上的要求。对该撞击坑的着陆和探测,能够揭示月球形成和演化的一些关键问题,在月球科学研究中具有划时代的意义。嫦娥四号将分析该地区的地表特征和地下构造,为了解月球、地球、太阳系演化提供第一手线索。
月球背面的南极-艾特肯盆地是太阳系内已知最大、最深的盆地,也是个古老的区域,保存了原始月壳的岩石,90%以上分布在月球背面。其直径2500km,最深处约为13km,从坑底最深处到最高壁顶处落差大约16km,含有许多月球初始的信息,保存着太阳系形成之初的宝贵信息。对其进行勘测有助于解答与月球有关的一系列重要疑问,有助于研究月球45亿年的漫长历史,有助于更好地理解组成月球的岩层,包括内部结构、成分和热演化,为了解月球、地球、太阳系演化提供第一手线索,有可能揭开“39亿年撞击峰值”的科学之谜。
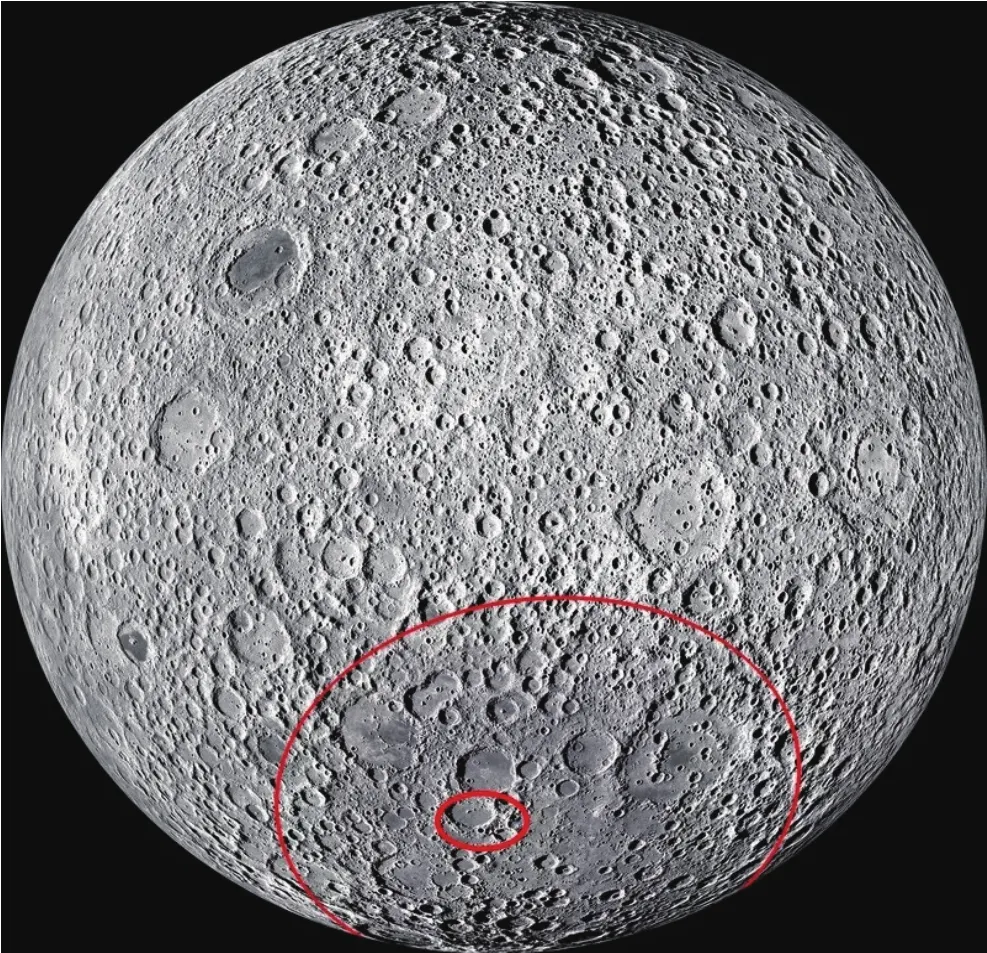
月球背面着陆地点,大红圈为南极-艾特肯盆地,小红圈为冯·卡门撞击坑
人类从未勘探过的冯·卡门撞击坑位于南极-艾特肯盆地中部,直径约186km,中心坐标为44.8°(S),175.9°(E),具有月球最古老的撞击特征,地势比较平坦,盆地内的月壳厚度较薄,主要岩石类型为低钛玄武岩。这个陨坑遍布次级撞击坑,喷射物覆盖陨坑内的绝大多数月海玄武岩。对其进行科学探测与研究,有望获得月球最古老月壳的物质组成、斜长岩高地的月壤厚度等重要成果,获得对月球早期演化历史的新认知。
另外,南极-艾特肯盆地的纬度和嫦娥三号在月球正面落月的纬度基本相同,因此在这里着陆,既能确保探测器获得足够的能源,又能避免月昼带来的高温影响。
冯·卡门撞击坑的特点:地势比较平坦,适合探测器着落,即所谓的坑大峰小;年龄古老,距今40亿年以上,后期可挖掘出月球雨海纪玄武岩样本;坑在形成之前已经存在一个更大的撞击坑,其表层或者浅表月壤中很可能有早期撞击暴露出的深层月幔物质,坑底有复杂的岩浆活动,多个证据显示雨海纪时冯·卡门坑存在重复撞击、月壳多次熔融,形成了今天我们看到的玄武岩层。综合多个因素,登陆冯·卡门坑的科学意义重大,未来获得的发现成果也值得期待。
3 飞行过程几个阶段
嫦娥四号整个飞行过程包括发射入轨段、地月转移段、近月制动段、环月飞行段、环月降轨段、动力下降段,最终着陆到月球背面。期间,着陆器和巡视器组合体通过“鹊桥”中继星与地面建立上下行通信链路。着陆成功后,着陆器择机完成巡视器释放分离和两器互拍。接着,着陆器、巡视器分别开展科学探测,并通过“鹊桥”将数据传回地球。
嫦娥四号落月探测器升空后,由于准时发射、准确入轨,原计划在近月制动前实施的3次轨道中途修正,只于2018年12月9日进行了1次,达到了预期目标。
经过约110h奔月飞行,2018年12月12日16:45,嫦娥四号成功实施了近月制动,顺利完成“太空刹车”,被月球捕获,进入了环月轨道。此前的12月12日16:39,嫦娥四号在距月面129km处成功实施了7500N发动机点火,约5min后发动机正常关机,嫦娥四号顺利进入近月点100km的环月轨道,近月制动获得圆满成功。
在环月轨道运行期间,调整了嫦娥四号落月探测器的环月轨道高度和倾角,开展了与“鹊桥”中继星的中继链路在轨测试和导航敏感器在轨测试。之所以迟迟不着陆,是为了等待时机,使嫦娥四号最终能在白天实施月球背面软着陆,从而充分获取太阳能,以便开展工作。另一方面,由于降落地点处于南极附近,它需要逐渐调整轨道倾角才能经过这里,比较耗时。同时,也要等待太阳光照在月球的角度达到理想的状态,这样所有的地貌都会有比较清晰的阴影,最大程度辅助光学设备选择并定位着陆地点。
2018年12月30日08:55,嫦娥四号又实施“太空刹车”,在距月面平均高度约100km的环月轨道成功变轨,降轨进入近月点高度约15km、远月点高度约100km的椭圆形环月轨道,这是预定的在月球背面着陆的准备轨道,为择机动力下降着陆做准备。
嫦娥四号整个动力下降过程分为6个阶段:主减速段、快速调整段、接近段、悬停段、避障段和缓速下降段。
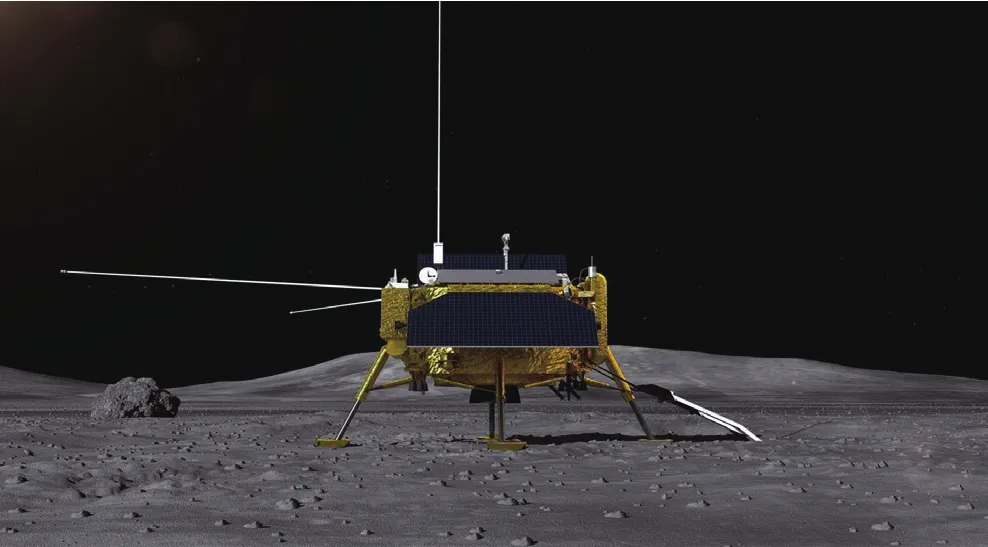
嫦娥四号着陆器平视图
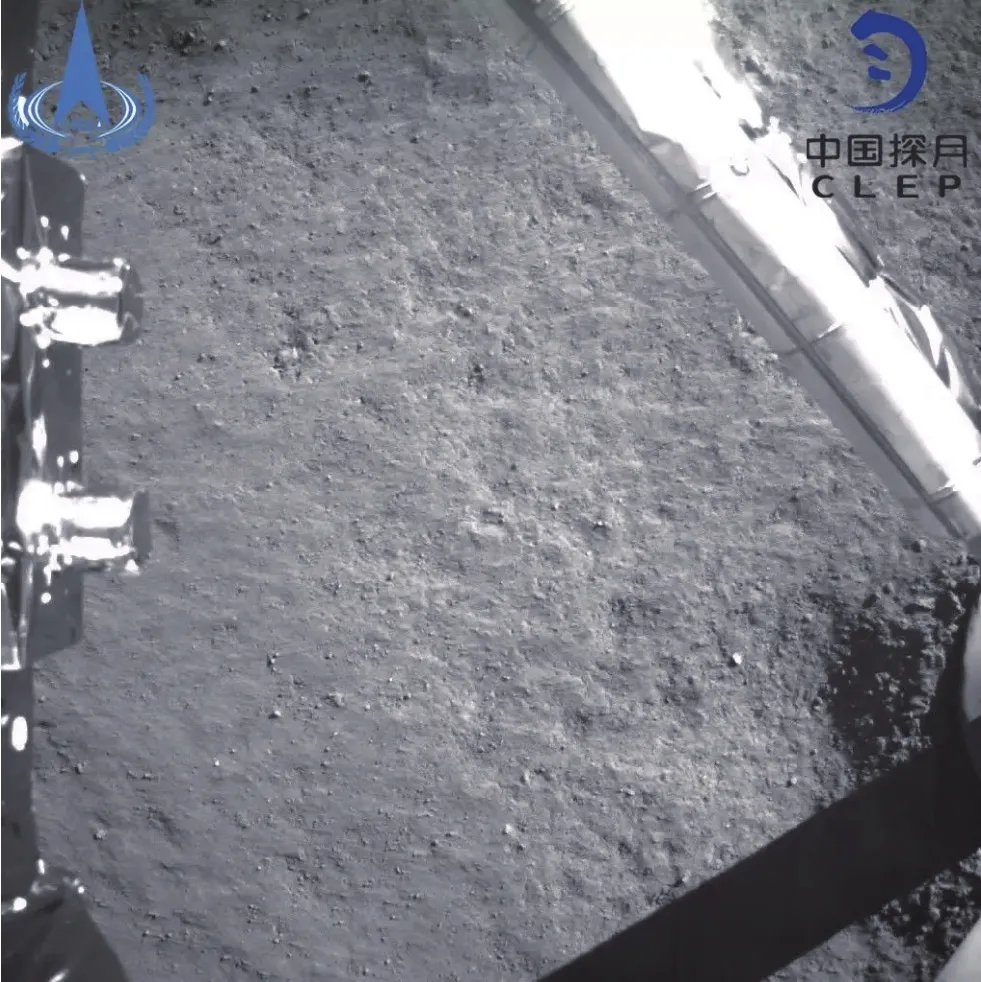
嫦娥四号探测器在月背软着陆后降落相机拍摄的图像
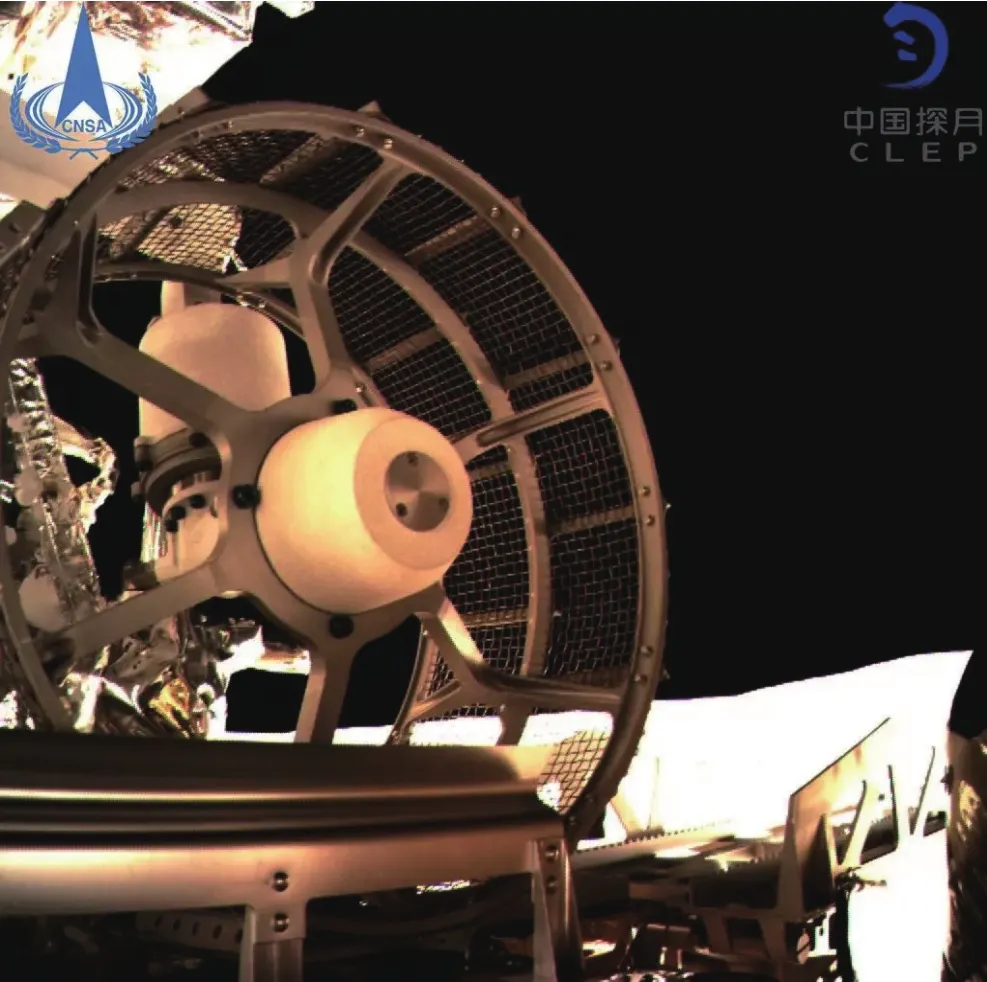
玉兔二号月球车的车轮
2019年1月3日10:15,嫦娥四号从距离月面15km处开始实施动力下降,7500N变推力发动机开机,逐步将探测器的速度从相对月球1.7km/s降到零。在距月面约6~8km处,探测器进行快速姿态调整,不断接近月球;在距月面100m处开始悬停,对障碍物和坡度进行识别,并自主避障;选定相对平坦的区域后,开始缓速垂直下降。约690s后,嫦娥四号自主着陆在月球背面南极-艾特肯盆地内的冯·卡门撞击坑内。落月过程中,降落相机拍摄了多张着陆区域影像图。
落月后,在地面控制下,通过“鹊桥”中继星的中继通信链路,嫦娥四号探测器进行了太阳翼和定向天线展开等多项工作,建立了定向天线高码速率链路。11:40,着陆器上的监视C相机获取了世界第一张近距离拍摄的月背影像图并传回地面。
接着,按计划开展了着陆器与巡视器分离各项准备工作,对“鹊桥”中继星状态、着陆点环境参数、设备状态、太阳入射角度等两器分离的实施条件,进行了最终检查确认。
1月3日晚间,嫦娥四号着陆器与巡视器成功分离,22:22,巡视器踏上月面,玉兔二号在月背留下了第一道印迹。
1月11日8:00,着陆器上的地形地貌相机完成了环拍。
1月11日16:47,嫦娥四号着陆器与玉兔二号巡视器顺利完成互拍。

两器分离后,月兔二号在月背留下了人类航天器第一行“脚印”
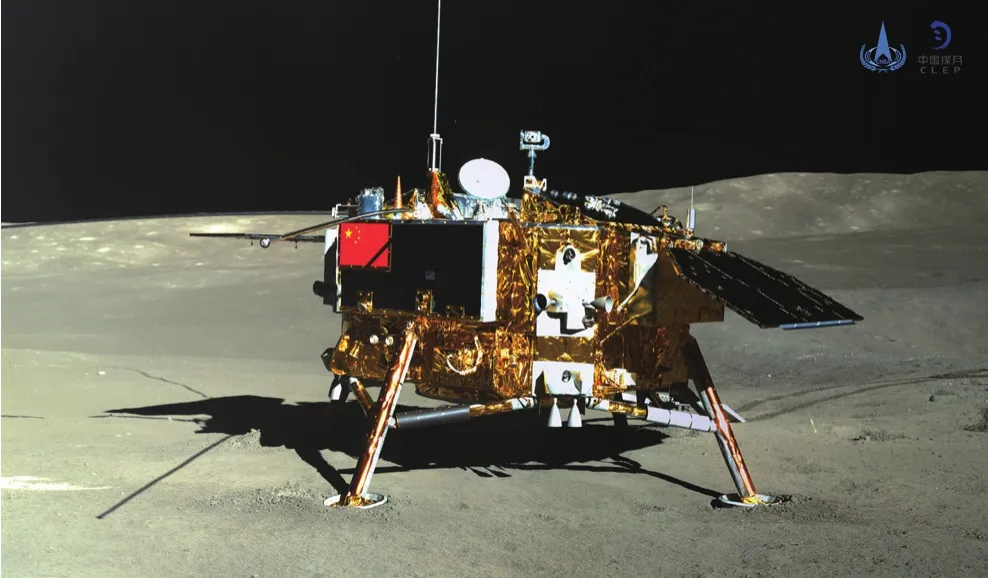
玉兔二号巡视器全景相机对嫦娥四号着陆器成像
嫦娥四号着陆器地形地貌相机对玉兔二号巡视器成像
4 目标新颖,含金量高
嫦娥四号任务的工程目标主要有两个:①研制、发射月球中继通信卫星,实现国际首次地月L2点的测控及中继通信;②研制、发射月球着陆器和巡视器,实现国际首次月球背面软着陆和巡视探测。
其科学目标主要有三个:①开展月球背面低频射电天文观测与研究;②开展月球背面巡视区形貌、矿物组份及月表浅层结构探测与研究;③试验性开展月球背面中子辐射剂量、中性原子等月球环境探测研究。
在人类历史上首次利用月球背面洁净的电磁环境进行月基低频射电天文观测是嫦娥四号探测任务的最大亮点。由于受到地球电离层的干扰,在地球上难以开展频率低于10MHz的射电天文观测,在地球轨道甚至月球正面开展的空间射电天文观测也受到地球电离层反射和人工无线电的干扰。
月球背面被认为是开展低频射电天文观测的绝佳地点,它屏蔽了地球的无线电干扰、闪电和极光无线电发射,月夜期间还屏蔽强烈的太阳射电辐射。利用月球背面独特的无线电环境,能开展的观测与研究包括太阳低频射电和月表射电环境探测。
因此,分别在嫦娥四号着陆器和“鹊桥”中继星上新增配置了国内新研制的低频射电频谱仪及荷兰的低频射电探测仪,用于开展频率范围在10MHz附近的低频射电天文观测,填补人类在0.1~40MHz射电天文观测的空白,有望在太阳风激波、日冕物质抛射和高能电子束的产生机理等方面取得原创性的成果。
5 探测两器上的载荷
作为嫦娥三号的备份,嫦娥四号仍由着陆器和巡视器(即玉兔二号月球车)组成,但是因为嫦娥四号与嫦娥三号的科学目标不同,因此两者所装载的科学载荷有明显变化,更换了部分科学载荷,其中最主要的特点是装载了国际科学载荷。
在嫦娥四号着陆器上加装了德国的月表中子与辐射剂量探测仪(LND)。它能测量能量中性粒子辐射和着陆器附近月壤中的相关物质含量,即测量月表包括带电粒子、γ射线和中子的综合粒子辐射剂量,以及月表快中子能谱和热中子通量,探测着陆区的辐射剂量,分析月球远侧的辐射环境,为未来的载人登月航天员的危险度进行前期评估,提供相应辐射防护的依据。
在玉兔二号月球车上加装了瑞典的中性原子探测仪(ASAN),能探测巡视探测点0.01~10keV能量范围内的能量中性原子及正离子,这将是国际首次在月表开展能量中性原子探测。它对于研究太阳风与月表相互作用机制、月表逃逸层的形成和维持机制等关键科学问题有着重要的意义。这是人类探月史上首次在月表开展这项探测活动。
嫦娥四号着陆器质量为3.78t,设计寿命6个月。其上的有效载荷与嫦娥三号着陆器上的类似,仍装有降落相机、地形地貌相机,但增加了国内新研发的低频射电频谱仪,以及德国的月表中子与辐射剂量探测仪,去掉了嫦娥三号的月基光学望远镜、极紫外相机。装有3根5m长的低频射电频谱仪天线,是嫦娥四号着陆器与嫦娥三号着陆器外形上最显著的区别。
低频射电频谱仪将利用月球背面没有地球电磁波干扰,天然洁净的环境,探测0.1~40MHz范围内的低频射电特征和月表射电环境。另外,还会与“鹊桥”中继星上携带的荷兰低频射电探测仪(用于探测来自太阳系内天体和银河系的0.1~80MHz低频射电辐射,为未来太阳系外的行星射电探测提供重要的参考依据)协同观测,互为验证和补充。它们用于研究太阳爆发、着陆区上空的月球空间环境,还可以对来自太阳系行星的低频射电场进行观测,并“聆听”来自宇宙更深处的“声音”。
降落相机用于着陆器在2km~4m高降落过程中动态拍摄着陆区域的光学图像,从而分析着陆区月表地形地貌和地质情况。它仅在着陆过程中使用。
地形地貌相机用于获取着陆区月表的光学成像,绘制着陆区地形、地貌图,并时刻关注着月球车的运行状况。
与嫦娥三号着陆器相比,嫦娥四号着陆器增加了3根5m长的低频射电频谱仪天线
玉兔二号月球车高1.5m,质量135kg,设计寿命3个月,可以爬20°坡,跨越200mm的障碍。其上仍装有全景相机、测月雷达、红外成像光谱仪,但增加了瑞典的中性原子探测仪,去掉了嫦娥三号的粒子激发X射线谱仪。因此,玉兔二号月球车也就不需要机器臂了,从而比玉兔号月球车轻了2kg,是世界探月史上质量最小的月球车。
全景相机可拍彩色立体图像,获取巡视区的月表图像。相机装在桅杆上,可360°旋转和90°俯仰拍摄周边图像,随时了解前方有没有障碍等,做出所需的“决策”。其成像方式为彩色成像与全色成像切换。
测月雷达装在月球车底部,在巡视过程中直接探测月表下的月壤厚度和月壳浅层结构。该测月雷达设置了两个不同频段,借助其探测出的数据,研究人员可以绘制出第一幅月球背面剖面图。其探测深度为月球地下50m左右,而实际深度有望到达200多米,有助于月球背面的地质研究。
红外成像光谱仪能探测从可见近红外到短波红外的高分辨率反射光谱及图像,用于获取巡视探测点的月表光谱数据和几何图像数据,调查巡视区月表矿物组成和分布分析,开展巡视区能源和矿产资源的综合研究。
6 改进多处,性能大增
嫦娥四号的着陆方式与工作状态跟嫦娥三号也有很大区别,性能上有很大提升,这是因为嫦娥三号着陆区地形起伏仅800m,相当于在华北平原着陆,而嫦娥四号着陆区地形起伏达到6km,相当于在崇山峻岭的云贵川地区着陆。
月球正面有较为宽阔的平原,虽然也有许多陨石坑,但即使是坑底也相对平整,所以嫦娥三号是以弧形轨迹缓慢着陆。
月球背面地形相比正面更加复杂,着陆区相当于嫦娥三号着陆区的1/8,陨石坑更多,大坑套小坑,地势更陡峭,山峰林立,很难找出再大一些、平坦一些的地方供嫦娥四号安身。由于嫦娥四号要在凸凹不平的地方软着陆,所以需要具有比嫦娥三号更准确的着陆精度。嫦娥四号落区有海拔10km高的山,着陆点在凹地海拔—6km处。为了不撞到峭壁,嫦娥四号需具备很高的自主导航和避障功能,以便自主寻找地势相对平坦的地区进行着陆,并只能采取近乎垂直的着陆方式,而且着陆时间短,航程短,风险高。
着陆区变化对任务的影响主要有:动力下降航迹的高程差变大,制导、导航与控制(GNC)需优化动力下降策略;着陆区范围缩小,探测器应具备高精度着陆控制策略;可能存在地形对通信和光照的遮挡,探测器需具备更强的自主功能。另外,嫦娥四号与地面交流需要通过“鹊桥”中继星中转,其间会产生约60s的延时,这对于瞬息万变的降落过程显然太久,因此落月全程需要由它自主完成。结果,嫦娥四号成功着陆在预定地点。
嫦娥三号在长月夜—180℃的环境中是不能工作的,而嫦娥四号将采取新的能源供给方式——同位素温差发电与热电综合利用技术,以保证其度过寒冷漫长的月夜及正常开展探测工作,在国内首次实测月夜期间浅层月壤的温度。
嫦娥四号的玉兔二号月球车虽与嫦娥三号携带的玉兔号月球车外形和质量一样,但由于要首次在月球背面软着陆和巡视,因此针对月球背面复杂的地形条件、中继通信新的需求、极大的温差和科学目标的实际需要等因素,对玉兔二号月球车进行了适应性更改和有效载荷配置调整,在运动安全、能源供给、科学探测和测控通信等方面均做了特殊的设计。尤其在线路方面进行了设计改进和试验验证,使它更强大,既不怕极热极冷的“广寒宫”,又能完成更多新任务。
此外,玉兔二号月球车还吸收了嫦娥三号玉兔号的经验。针对玉兔号在执行任务过程中遇到的一些问题,有针对性地进行了电缆设计与材料应用等技术的改进和试验。玉兔二号月球车仅在电缆钩挂、摩擦方面就做了上千次试验,同时也尽量减少电缆裸露在外的面积,减少电缆的故障风险。
因此,玉兔二号更轻盈、更自主、更健壮、更可靠。
总之,要实现嫦娥四号任务的工程目标,需突破四项关键技术:一是复杂地形环境条件下的安全着陆,二是地月L2点晕轨道设计与控制,三是地月L2点远距离中继通信,四是同位素温差发电与热电综合利用。

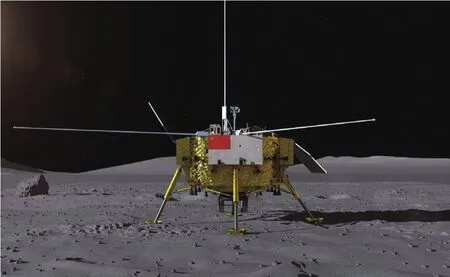
嫦娥四号着陆器和玉兔二号月球车工作示意图
7 有趣的微型生态圈
嫦娥四号着陆器上还有一个科普载荷——月面微型生态圈,首次尝试研究动植物在月球低重力环境下的生长状况,用于天体生物学实验和大众科普。它由重庆大学牵头研制。
月面微型生态圈是一个由特殊铝合金材料制成的圆柱形罐子,高18cm,直径16cm,净容积约0.8L,总质量约3kg。载荷内搭载了棉花、油菜、马铃薯、拟南芥、酵母和果蝇等6种生物,还有土壤、水、营养液、空气以及微型相机和信息传输系统等科研设备,构成了简单生态系统,可验证在月面太阳自然光照条件下植物的光合作用原理,观测月面低重力条件下动植物的生长状况,积累构建太空生命保障系统的技术与经验,并向公众普及生物学知识。
它采用圈柱式结构,通过顶部10mm直径的光导管将太阳光引入罐子里,提供植物生长所需能源,帮助种子生长;采用聚酯薄膜保温层和半导体冷热片,实现载荷内部温度控制;采用着陆器供电与锂硫特种电池,协同实现昼夜连续供电。通过内置摄像头对生物生长过程进行图像拍摄并传回地面。截至发稿时,根据载荷传回的照片显示,棉花已成功发芽。
8 有望实现三大壮举
嫦娥四号任务的“两器一星”上共配置了6台国内研制科学载荷和3台国际科学载荷。它们开展以低频射电天文观测、巡视区形貌、矿物组份及浅层结构为主的科学探测。
嫦娥四号在月球背面的着陆点附近开展低频射电天文观测和月表形貌、矿物组成、化学成分、浅层结构、中子及辐射剂量和能量中性原子探测,有望填补0.1~40MHz频段射电天文观测的空白,取得对月球早期演化历史的新认识。继续更深层次、更加全面地科学探测月球地质、资源等方面的信息,完善月球的档案资料,有望取得行星际激波、日冕物质抛射和空间传播机理等方面原创性成果。
嫦娥四号任务特点鲜明,预期成果显著,将是一次低成本、短周期、大开放、高效益的示范性空间探测任务,有望实现三大“壮举”:首次实现人类探测器造访月球背面;首次实现人类航天器在地月L2点对地月中继通信;为科学工作者提供月球背面空间科学研究平台,获得一批重大的原创性科学研究成果。
嫦娥四号任务完成后,我国将在2019年发射嫦娥五号采样返回器,它由上升器、着陆器、轨道器、返回器四个部分组成,完成探月工程的重大跨越——带回2kg月球样品。