飞行器软轴滚珠检测技术研究
2019-02-15王明泉张俊生路晓冬
丁 杰,王明泉,张俊生,路晓冬
(中北大学 国防重点实验室,太原 030051)
1 引 言
在新型非电控飞行器的传动部件选型中,滚珠式软轴因其空间小、重量轻、易安装及高可靠性等优点,正在逐步替代传统的连杆、推拉钢索,其质量的好坏直接关系到飞行器的使用安全.滚珠式软轴主要由外管组件、固定杆、滚珠、保持架及芯部滑杆组成,外管组件用于保护和密封软轴,固定杆用于保证整体结构的稳定,保持架杆上有诸多等距小孔,用于安装并固定滚珠,芯部滑杆由上下两排滚珠引导运动,由此产生传动力,滚珠则起到减小摩擦力与引导传动的作用[1].
滚珠式软轴的滚珠情况主要分数量正常、滚珠缺漏、滚珠增多、滚珠错位四种,其中滚珠增多与滚珠错位因出现概率极小可以忽略.滚珠缺漏是指保持架小孔中丢失滚珠,严重影响软轴质量,所以对软轴滚珠进行检测也就是对滚珠进行识别并计数分析,以得到滚珠的缺漏信息.传统的滚珠式软轴检测,采用纯人工或半自动检测方法,即首先使用成像设备对软轴进行实时成像,然后在实时显示时或者采集到图像后进行人工目力检测.成像时,由于硬件性能限制和电压电流的不易调整性,成像质量较难优化[2];若采用图像拼接法来采集图像,则需要处理图像特征点选取、重叠区域拼接等问题[3];而在做滚珠识别与技术分析时,由于人的生理特性,人工目力识别与计数方法耗时长、误差大,不具有适用性.
鉴于此,本文对滚珠式软轴检测技术进行了研究,在成像中引入窗技术改善成像质量,并用一次成图技术进行图像的采集,最后开发配套的基于图像形态学的滚珠自动识别算法,实验结果优良.
2 窗技术
在进行软轴成像时,常使用X射线检测法,其原理是给X射线源供电以产生X射线,分别照射软轴的不同部位,由于软轴不同结构的密度、材质、形状有所差别,射线接收器将会采集到衰减程度不一的X射线,射线接收器最后进行光电转换把信号传送到电脑上生成软轴图像.所以当电压电流值过低,X射线强度就弱,图像会偏暗,反之则偏亮,若电压电流值适中,则成像质量较好,既符合人工观测,也有利于后续的滚珠自动识别.但在实际操作中,根据软轴的不同,需要不断调整对应的电压电流值,操作繁琐,而且在调整时需要考虑大电压大电流导致射线剂量过高而可能引发的辐射安全问题.鉴于此,本文引入窗技术,在实时显示中对优化软轴成像质量,弥补射线检测方法的不足.
窗技术(Window Technique)是医学CT(Computed Tomography)领域中一种常用的显示技术,用于观察不同密度的组织信息,主要包括窗位与窗宽两个方面.窗宽是CT图像上显示的CT值范围,在此范围内的被检测组织以不同的灰度显示,若高于此范围,组织将以统一灰度的白影显示,若低于此范围,组织将以统一灰度的黑影显示;窗位则是窗的中心位置,窗位不同,可显示的CT值区间位置不同.如式(1)与式(2)所示,wlow表示显示CT值范围的最小值,whigh表示显示CT值范围的最大值,wlevel表示窗位,wwidth表示窗宽[4].简单来说,窗技术的原理是将被检测组织的CT值映射到0-255的灰度值范围内突出显示,例如:若窗宽为40,窗位为60,则其显示CT值范围为20至80,此时CT值在20至80之间的组织便可以清晰显示出来,而此CT值范围外的组织变成全黑或者全白.
(1)

(2)
另外,如果增大窗宽,则显示的CT值范围增大,能显示的不同密度的组织增多,但各组织之间的灰度差减少,区分度减小;如果减少窗宽,则显示组织减少,但各组织之间的灰度差变大,更加具有区分度.
对于滚珠式软轴而言,其不同的结构具有不同的密度,成像之后滚珠与其它结构之间存在一定的灰度差,通过使用窗技术选择合适的窗位窗宽,并配合合适的电压电流,就能得到较好的显示效果.考虑到软轴的直径为8mm至15mm不等,组成的结构材质相对固定,并遵循电压电流的"安全节能"标准,在保证滚珠清晰可见并且轮廓完整的前提下,电压一般设置为80kv,电流设置为1.5mA,窗位窗宽分别设置为13000与18000左右较为合适,如图1所示:

图1 不同参数下的显示效果Fig.1 Display effect under different parameters
3 图像采集
传统软轴检测在做图像采集时,多使用的是设备固定,通过移动软轴来对软轴的不同部位进行采集的方法,此方法原理简单、设备占地面积较小,但是存在因移动软轴时发生抖动而导致成像质量差的缺点.在进行图像生成时,也多使用图像拼接技术,即将分段采集到的诸多软轴图像拼接成一整条软轴的完整图像,使用此方法一般需要解决图像特征点提取、重叠区域处理等诸多问题,若处理不当容易出现拼接错位、拼接重叠等情况[5,6].
鉴于此,本文提出软轴固定、设备运动与一次成图技术相结合的方法,对软轴图像进行采集.设计思路如下:
1) 一般长8m至15m不等,故安放并固定软轴的导轨长度不短于15米;
2) 射线源等设备固定于移动式的保护铅房内部,采集图像时导轨和软轴保持固定,铅房延导轨匀速移动.
3) 待整条软轴扫描完毕后一次性生成整条软轴图像,具体实现机制是随着铅房的匀速移动,采集到的图像信息不断更新并持续暂存进预设好的图像矩阵中,最后再进行图像的生成,这就避开了使用图像拼接法带来的诸多复杂问题.
使用此方法进行软轴图像采集,克服了传统方法中图像抖动的缺点,同时也使软轴长图的生成更为简洁高效.
4 基于图像形态学的滚珠识别算法
对软轴图像中的目标滚珠进行识别,涉及到图像分割.主流的图像分割方法根据原理不同主要分基于阈值、基于边缘和基于区域三种.
基于阈值的图像分割方法的思想是当目标与背景的灰度差异较大时,通过设定一个中间值分离目标和背景.此方法只适用于目标与背景的灰度差异明显的情况[7].典型的有简单二值化、Otsu法等.
基于边缘的图像分割方法是建立在物体边缘灰度值变化剧烈这一基础之上[8].此方法适用于目标边缘完整清晰的情况.典型的有Sobel法、Canny法等基于区域的图像分割方法则将图像按照相似性准则分成不同的区域,主要包括种子区域生长法、区域分裂合并法和分水岭法等几种类型.以其中典型的分水岭法为例,其基本思想是把图像看作是测地学上的拓扑地貌,图像中每一点像素的灰度值表示该点的海拔高度,每一个局部极小值及其影响区域称为集水盆,而集水盆的边界则形成分水岭.首先在每一个局部极小值表面,刺穿一个小孔,然后把整个模型慢慢浸入水中,随着水平面的上升,每一个局部极小值的影响区域慢慢向外扩展,在两个集水盆汇合处构筑大坝,即形成分水岭[9].分水岭算法对微弱的边缘有着良好的响应,但图像中的噪声会使分水岭算法产生过分割的现象.
为验证上述三种分割算法对软轴图像的适用性,对图1进行不同分割算法下的实验,分割效果如图2所示:
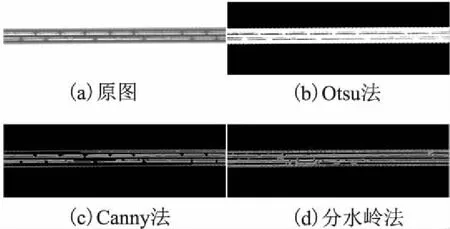
图2 主流图像分割法效果Fig.2 Results of main image segmentation methods
分析图4,因为原图中滚珠和非滚珠结构的灰度值极其相近,导致用Otsu法分割效果不佳;又因为原图中滚珠上下两端与软轴其它结构容易混为一体,导致滚珠轮廓并不完整清晰,所以Canny法的分割效果也欠佳;分水岭法则是受到非滚珠区域的影响出现了过分割的现象.上述三种方法的分割效果均不理想,影响后续的滚珠识别与提取.
为克服上述缺点,并针对传统检测方法中存在的耗时长、误差大等问题,本文开发了基于图像形态学的滚珠自动识别算法来进行滚珠的识别.
图像形态学方法利用一个结构元素来收集图像的信息,当结构元素在图像中不断移动时,便可考察图像各个部分之间的相互关系,从而分析图像的结构特征.图像形态学基本运算有膨胀与腐蚀两种.膨胀运算将图像A与结构元素B进行卷积运算,结构元素通常为圆形或正方形,内部有一个可定义的锚点,其通常为中心点.在卷积过程中,将结构元素B划过图像A,并将结构元素B覆盖区域的最大像素值提取出来,以代替锚点位置的像素值.腐蚀运算与膨胀运算原理相似,只不过提取的是最小像素值[10].
表1举例几种常用形态学操作方法及其作用,其中⊕表示用结构元素B对A进行膨胀操作,⊖表示用结构元素B对A进行腐蚀操作:

表1 形态学操作Table 1 Morphological operations
基于上述理论,通过构造合适的结构元素,并选择适当的图像形态学方法对软轴图像进行处理,可以较好的提取图像中的滚珠信息,便于后续的计数分析.
基于图像形态学的滚珠自动识别算法的核心思想是利用软轴原图生成掩模图像和模板图像,再利用掩模图像和模板图像合成检测结果图像,其处理步骤如下所示:
步骤1.首先生成掩模图像:对图2(a)所示原图进行自适应二值化[10],考虑到软轴长度大、宽度小、滚珠分列上下两行且结构的像素大小相对固定等特点,再进行水平方向上的腐蚀运算,结构元素取(1,8),垂直方向上进行膨胀运算,结构元素取(9,1),如图3(a)所示,此时滚珠的位置信息已经比较突出,但仍不能精确定位滚珠位置;
步骤2.再生成模板图像:原图先后通过结构元素为(7,1)的开、闭运算,和结构元素为(31,1)的黑帽运算[11]得到图3(b)所示的模板图像;
步骤3.利用掩模图像和模板图像合成检测结果图像:图3(a)与图3(b)做相与运算得到图3(c),此时滚珠已经被较为精确的识别出来,但仍然存在滚珠被分割与存在无关细小结构的情况,前者是软轴内部的保持架引起的,后者则是软轴内部的其它复杂结构引起.所以需要对图3(c)进行垂直方向的闭运算以连接被分割的滚珠,再进行腐蚀运算去除细小结构,结构元素分别为(3,3)与(3,5),得到图3(d),注意这些结构元素需要连接单个过分割的滚珠,但不可以使左右两个滚珠相连,同时也要避免填充非滚珠区域.可见此时已有滚珠的基本结构已被较准确的标注了出来.为了方便后续验证识别是否准确,标注信息不能覆盖掉原有的滚珠区域,故最后通过结构元素为(3,3)的形态学梯度运算[12,13]求取滚珠的轮廓,得到如图3(e)所示的第一个目标图像,即已有滚珠的识别结果,其中每个轮廓分别代表此处存在一个滚珠:
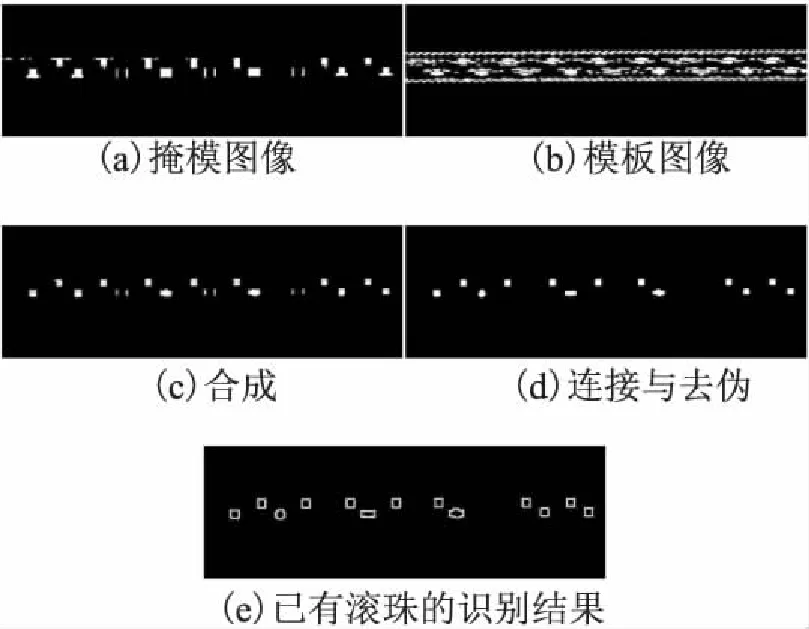
图3 已有滚珠的识别结果的识别流程Fig.3 Recognition process of existing balls
步骤4.缺漏滚珠则可以通过"逆向方法"来提取,即缺漏滚珠只存在于已检测到的滚珠区域之外.首先对图3(e)进行结构元素为(150,1)的膨胀运算得到图4(a),此结构元素在不填充非滚珠区域前提下需要最大程度填充滚珠区域.再将图4(a)与原图闭运算的结果做差得到图4(b)所示的掩模图像,图中白色部分即为可能存在缺漏滚珠的区域;
步骤5.对原图构造(31,1)的结构元素进行顶帽运算得到模板图像图4(c),再将图4(b)与图4(c)做相与运算,并参照步骤3通过连接被分割滚珠和去除细小结构的操作得到缺漏滚珠的精确区域,如图4(d)所示;最后令结构元素为(3,3),并通过形态学梯度运算得到如图4(e)所示的第2个目标图像,即缺漏滚珠的识别结果,其中每个轮廓分别代表此处缺漏一个滚珠:

图4 缺漏滚珠的识别结果的识别流程Fig.4 Recognition process of missing balls
识别出滚珠的轮廓信息后,还需要进行计数分析.本文使用OpenCV计算机视觉库[14]中的函数工具来实现自动计数,以代替传统的人工目力计数方法,更加快速准确.表2是对图2(a)的计数分析结果.
由表2可知,图4(a)中的13个已有滚珠和5个缺漏滚珠均被准确识别出来并正确计数,且计数耗时为0.4秒.

表2 滚珠识别与计数分析结果Table 2 Analysis results of ball recognition and counting
5 实验结果
根据本文提出的方法,分别对某A、B、C、D、E五种型号的滚珠式软轴进行检测,并与传统人工检测方法做对比.本文方法的检测流程如图5所示:首先引入窗技术,配合X射线检测法优化软轴的成像质量,并使用软轴固定、设备移动与一次成图技术相结合的方法进行图像采集,最后开发基于图像形态学的滚珠自动识别算法对软轴图像进行识别与计数分析. 实验的滚珠识别与计数分析结果统计如表3所示.
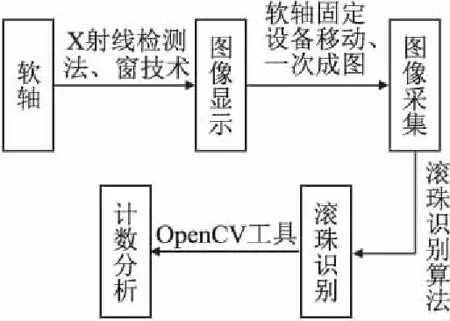
图5 检测流程图
Fig.5 Flow chart of detection

表3 滚珠识别与计数分析结果Table 3 Analysis results of ball recognition and counting
根据表3,在识别率方面,使用传统人工检测方法进行软轴滚珠识别,对已有滚珠的识别率达到98%左右,对缺漏滚珠的识别率最低只有70.6%;使用本文的方法进行软轴滚珠检测,对已有滚珠的识别率能达到99%左右,对缺漏滚珠的识别率达到88.2%以上.在计数耗时方面,以E型号软轴为例,传统人工目力计数需要近10分钟而使用本文方法计数只需不到20秒的时间.相比之下,本文方法在将缺漏滚珠识别率提高8.4%以上的同时,将计数时间缩短到原先的3.5%以下,检测结果更加准确,检测速度大幅提升.
6 结束语
本文针对传统飞行器滚珠式软轴检测中存在的误差大、耗时长的不足,首先引入窗技术对成像质量进行了优化,再使用软轴固定、设备移动与一次成图技术相结合的方法进行图像的采集,并开发了基于图像形态学的滚珠自动识别算法.实验结果表明,本文方法在将缺漏滚珠识别率提高8.4%以上的同时,将计数时间缩短到原先的3.5%以下,满足了工业检测要求.同时,本文方法对不同型号的软轴、成像质量不一的图像也具有一定的适用性.
