《夏长》号沉船打捞过程中扳正驳船运动响应分析
2019-02-12李军
李军

摘 要:针对大型沉船整体打捞过程中的扳正驳船,以沉船《夏长》号打捞扳正过程为例,利用波浪辐射/衍射理论,结合水动力计算程序,建立风浪流作用下扳正驳船船体、扳正张力索及系固张力索模型,模拟扳正驳船在不同绳索预张力、不同吃水、不同扳正角度下的运动响应,据此得到最优扳正驳船系统设计方案。《夏长》号打捞扳正过程运动响应分析结果与工程数据高度吻合,验证了分析方法的正确性,最终成功地完成了沉船《夏长》号的扳正。
关键词:多点系泊;张力;运动响应;沉船打捞;扳正
中图分类号:U676.62 文献标识码:A
Abstract: In this paper, the theories of potential flow and diffraction/radiation are used to calculate the dynamic response of a righting barge, which provides the righting force for the integral wreck removal of the large-scale bulk carrier “Trans Summer”. The wave, wind, and current loads are considered to create the righting barge system model with the hydro dynamic calculation program, then the dynamic response results of the righting barge under different pre-tension forces, different draft conditions and different righting angles are obtained in the righting operation. With these results, the optimal righting barge system design scheme is obtained. The calculated result with this analysis method is in good agreement with the practical engineering data, and the righting operation of “Trans Summer” is finally achieved.
Key words: Multipoint mooring; Tension; dynamic response; Salvage; Righting
1 引言
大吨位、大倾斜度沉船扳正历来是打捞工程技术上的难题[1]。沉船扳正过程载荷复杂且变化多样,与扳正驳船的运动响应有密切关系,因而对提供扳正力的扳正驳船进行动力响应分析显得十分重要。
对浮式结构,目前常用的系泊定位方法有锚链系泊和张力缆系泊两种[2]。本文重点分析扳正驳船在波浪中动力响应,并以打捞沉船《夏长》号工程中的《重任1500》扳正驳船为例,利用势流理论,结合水动力计算软件并加入风浪流作用,对该扳正驳船在扳正过程进行动力响应模拟分析。分析不同绳索预张力、不同驳船吃水及不同扳正角度工况对运动响应影响,以获得最优的扳正系统设计方案。
2 扳正驳船运动响应方程
根据静力分析法和动力分析法,可以准确地预报在不同海况下的动力響应,得到扳正驳船及其张力系泊系统总体运动方程为:
式中:M、c、k分别为质量矩阵、阻尼矩阵和刚度矩阵;
Fs、Fwf、Fsv、Fm分别为流体静力、波频力、波浪低频慢漂力与系泊力。
根据公式(1),可以通过水动力程序计算,获得扳正驳船的运动响应。
3 工程实例及计算模型
3.1 工程实例
因受台风影响,60 000 DWT的散货船《夏长》号于2013年8月在珠海小万山岛偏南海域沉没,沉船总长×型宽×型深=189.99×32.26×18.00 m;沉船沉态为左倾约104°、尾倾约2°;事故海域水深22 m,低潮时船舶右舷露出水面约2.5 m。
扳正驳船《重任1500》,其主甲板上安装了14套液压拉力千斤顶设备,每套设备由两个反力架、两个千斤顶及两个导向轮组成,拉力千斤顶通过反力架和船体相连,单个千斤顶提供最大300 t的拉力:拉力千斤顶设备分别安装在驳船左右舷,左舷14个千斤顶通过14根长度约108 m、直径为110 mm的钢丝绳(以下简称“系固络”)及导向轮与安装在海底的14个吸力锚相连,用于系固扳正驳船;右舷14个千斤顶通过14根长度约106 m、直径为110 mm钢丝绳(以下简称“扳正络”)及导向轮与沉船上焊接好的14个眼板连接,用于扳正沉船。
沉船扳正原理是:当液压千斤顶开始工作,驳船与沉船间的“扳正络”及驳船与吸力锚间“系固络”变短,沉船便缓慢从原来的左倾104°回正。
沉船的扳正如图1所示,千斤顶、固定反力架及导向轮等设备的布置如图2所示。另外,在甲板驳船4个角分别配置了一个锚,用于控制扳正驳船的纵向运动。
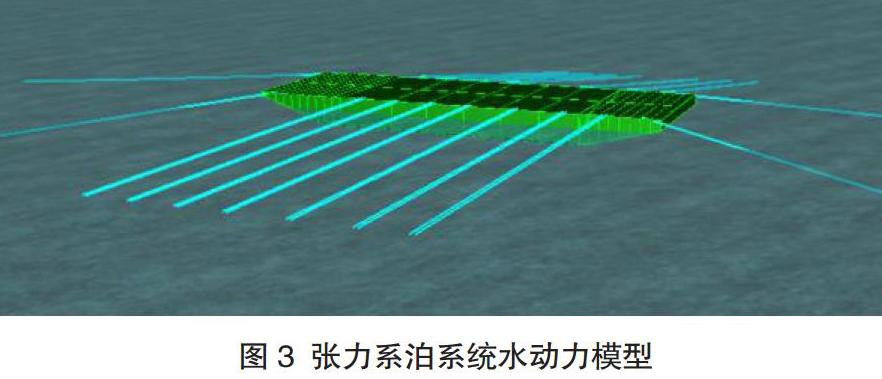
3.2 计算模型
根据上述系泊布置及扳正驳船数据,建立扳正系统三维水动力模型,如图3所示。
3.3 环境参数
由于扳正驳船需要根据沉船的首向及位置进行系泊布置,因此扳正驳船所处的海域与沉船海域相同。在沉船扳正过程中,为保证响应的随机性,同时更好地校核设计方案的可行性,选取以下海况(见表1)作为设计工况。
4 扳正过程运动响应分析
4.1 扳正过程
沉船扳正过程变量主要有:扳正力大小,扳正力方向,沉船回正旋转点。其中,扳正方向受到“扳正络”与“系固络”角度直接影响,沉船扳正旋转点与沉船横倾及搁座点有关。
沉船扳正过程总体思路是:利用浮吊及扳正驳船进行扳正,其中扳正驳船提供大部分的扳正力。通过在扳正驳船上的液压千斤顶作用,扳正驳船与沉船间的“扳正络”及驳船与吸力锚间的“系固络”开始缩短并受力,当扳正力矩大于沉船倾斜力矩时,沉船开始缓慢回正,然后继续收短扳正驳船与沉船之间钢丝绳,直至沉船回正至较小的横倾角度为止。
4.2 不同初始预张力的影响
沉船扳正过程中,由于扳正驳船上“扳正络”与“系固络”张力会实时变化,因此进行扳正驳船的运动响应分析必须考虑不同初始正力下的影响。由于扳正驳船的运动响应对系泊张力比较敏感,所以在不断增加“扳正络”初始预张力时,利用上述的扳正系统三维水动力模型模拟其运动响应,并选取工程较需要响应时域的最大值,结果汇编见图4 ~ 6。
由图4~6可知:(1)在模拟沉船扳正过程中,不同预张力下扳正驳船横摇在0°风浪流同向作用时最小,在横向时最大,且随着预张力的不断增大而增大;(2)不同预张力下扳正驳船的垂荡在0°时最小,在横向时最大,且随着预张力的不断增大而几乎保持不变;(3)扳正驳船上“扳正络”与“系固络”最大张力同样是在0°时最小,在横浪时最大,且随着预张力的不断增大而增大。
4.3 不同压载工况的影响
考虑到沉船在扳正过程中,如果扳正驳船排水量太小,因波浪产生的垂荡太大,进而导致“扳正络”与“系固络”的张力发生较大的变化,因此考虑通过压载水调整扳正驳船吃水,据此分析模拟扳正驳船在不同吃水下运动响应。计算结果见图7~9。
从图7~9可知:(1)在不同驳船吃水下,扳正驳船的横摇在0°时最小,且随着驳船吃水的不断增大而几乎不变;在90°时最大,且随着驳船吃水不断增大而缓慢增大;(2)不同驳船吃水下,扳正驳船的垂荡在0°时最小,在90°时最大,且随着预张力的不断增大而变化不明显;(3)扳正驳船上“扳正络”与“系固络”最大张力,同样是在0°时最小,在横向时最大,且0°时随着驳船吃水的不断增大保持不变;45°、90°时随着驳船吃水增加而增大,尤其是在吃水3.5 m ~ 4 m时。
4.4 不同扳正角度的影響
随着扳正不断进行,沉船横倾角也会不断减小,因此“扳正络”与水平面夹角会不断减小,而“系固络”与水平面夹角会不断增大。但通过分别控制“扳正络”与“系固络”的长度,可以适当调整上述的夹角,通过模拟不扳正角度下的驳船运动响应,计算结果见图10~12。
从图10 ~图12可知:(1)不同“系固络”与水平夹角下,横摇在0°时最小,在90°时最大,且随着夹角的不断增大而增大;(2)垂荡在0°、45°风浪流作用下时最小,且保持基本不变;在横浪时最大,且随着夹角的不断增大而稍微减小;(3)扳正驳船上“扳正络”与“系固络”最大张力,同样是在0°时最小,在横向时最大,且随着夹角不断增大而增大;45°时随着夹角不断增大基本保持不变;90°时随着夹角不断增大而稍微减小。
5 结果验证
实际响应数据与模拟计算结果误差在工程容许范围内,证明了模拟分析方法是合理可行的。
6 结论
本文通过对扳正驳船扳正过程进行模拟分析,并根据分析结果获得最优扳正系统方案,结果表明:
(1)通过减少“扳正络”预张力及“系固络”与水平面夹角,可以有效减小横摇;
(2)扳正驳船垂荡随驳船吃水、“扳正络”预张力及“系固络”与水平面夹角变化不大;
(3)“扳正络”及“系固络”的最大张力对船舶吃水及“系固络”与水平面夹角不太敏感,但对初始预张力较敏感。
参考文献
[1]赵孟信.“长征”轮打捞中关于扳正力的分析[J].航海技术,1995 (02):16-18+20.
[2]王环宇,孙昭晨.张力缆系泊浮体的数值波浪水槽时域模拟[J].水运工程,2012(06):74+76-78.
[3]陈鹏,马骏,黄进浩,李艳青,薛庆雨.基于AQWA的半潜式平台水动力分析及系泊性能计算分析[J].船海工程,2013,42(03):44-47.
[4]祁祺,张涛,文攀,刘土光.基于AQWA的FPSO系泊系统响应数值模拟[J].舰船科学技术,2011,33(12):14-18.
[5]黄佳,肖龙飞,谢文会,寇雨丰.张力腿平台系泊系统特性研究[J].中国海上油气,2013,25(03):68-72.
[6]李向群.多点系泊船舶在波浪中的运动及其系泊力[J].上海船舶运输科学研究所学报,1999(01):11-17.
[7]闫功伟,欧进萍.基于AQWA的张力腿平台动力响应分析[J].东南大学学报(自然科学版),2009,39(S2):304-310.
