直接线性变换法在车载式视频图像车速测算中的应用
2019-01-25何烈云
何烈云
(浙江警察学院交通管理工程系, 浙江杭州 310053)
0 引言
随着计算机技术的发展和各类视频摄录设备广泛使用,大量的道路交通事故发生过程被监控视频所拍摄到,基于视频图像的车辆行驶速度技术鉴定,已经成为了车速鉴定的一种主要手段。通过视频图像并借助一定的技术手段,可得到视频中目标车辆的行驶速度、加速度、行驶轨迹及车辆(行人)之间的方位关系,为认定交通事故责任提供依据。视频摄录设备根据安装方式不同可分为固定式和车载式两种,当前被广泛使用的行车记录仪是最为常见的车载式视频摄录设备。基于视频图像车速测算技术中,时间和距离是两个关键参数,时间可以通过视频帧间差方法获取,视频测速研究重点是如何精确测算与目标车辆距离。目前常用测距方法:道路环境参照物法、目标车辆参照物法、虚拟参照物法、网格法及模拟实验法[1-3]。这些方法均适用于固定式视频图像的测距。利用车载式视频摄录设备观测处于行驶状态的车辆速度时,由于目标车辆位置和背景均处于不断变化过程中,因此,相对于固定式视频摄录设备车速测算难度更大。文献[4]提出了基于摄像机内部参数与几何模型的测距方法,在忽略镜头畸变的前提下,利用透镜成像原理和几何模型推导距离关系模型。文献[5]提出逆投影变换的测距方法,假设同一台摄录设备焦距不变时,得出车宽与距离之间的关系模型。文献[6]利用非线性回归建立一个数学模型,并经过定量地评价拟合测量两车间距。文献[7] 提出了基于俯仰角动态补偿机制的单目视觉测距方法,通过对俯仰角进行动态的补偿提高测距精度。
上述文献提到的测距方法是将摄录设备成像满足理想小孔成像,在焦距不发生变化的情况下,且已知俯仰角大小及变化的情况,然后根据几何关系测量车辆距离。但是车载式视频摄录设备在拍摄过程中不管是焦距还是俯仰角都是不断发生变化的,所以这些方法在实践应用是存在一定的局限性。本文提出了一种将动态画面转换成静态图片,并利用直接线性变换法(Direct linear transformation,DLT)实现测距。DLT法可以建立三维F(X,Y,Z)道路场景和二维f(x′,y′)数字图像场景的映射关系,由于车辆一般只是在道路平面即二维空间内运动,用交通事故行驶速度鉴定的二维直接线性变换法的映射关系满足方程[8-10]:
通过像平面坐标系维f(x′,y′)求出路面坐标系F(X,Y,Z),精确得到目标车辆的具体方位,l1~l8是摄像机8个特征性标定参数。直接线性变换法不仅适用于固定式视频图像车速的计算,同样也适用于车载式视频图像车速测算。
1 直接线性变换法车载式视频图像车速计算原理
选取视频图像中若干关键帧进行分析,利用直接线性变法得到目标车辆的行驶距离,观测行驶距离和所用的图像帧数,进一步计算出目标车辆的行驶速度。根据确定目标车辆的定位法的原理不同,可以分为“绝对速度法”和“相对速度法”两种。
1.1 绝对速度法
绝对速度法是指以目标车辆车身某一特征点,相对于道路环境某固定参考点的距离改变量及所用的时间,直接计算目标车辆的行驶速度。绝对速度法主要用于低速行驶,且路面上有合适的参照物可供选取的情形。如图1所示,将目标车辆简称为甲车,安装有车载式视频摄录设备的车辆简称为乙车,取甲车车身特征点Q点、路面参照物P点。
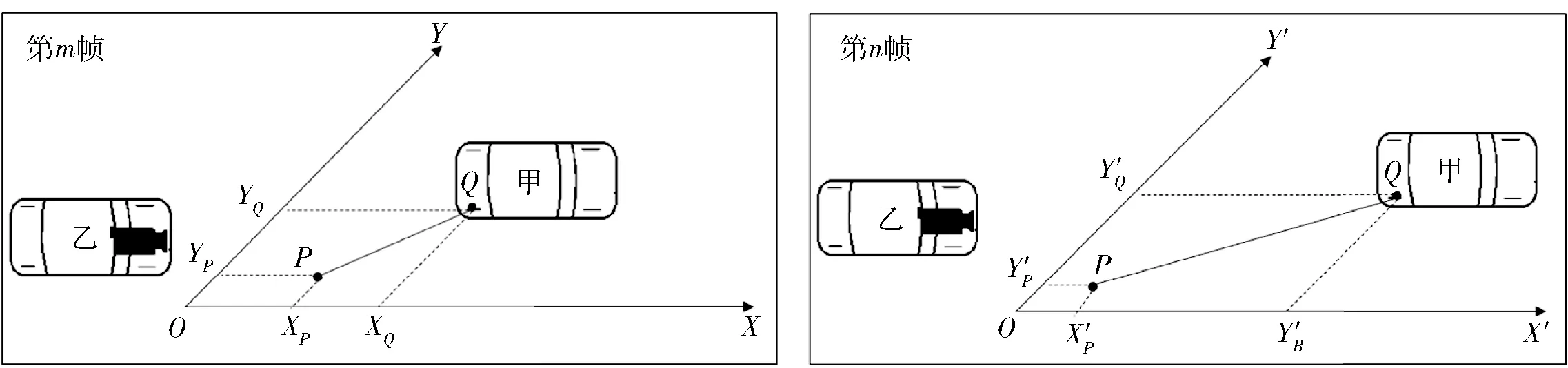
图1 绝对速度法路面坐标系
根据在第m帧和第n帧P点、Q点的路面坐标值,求出目标车辆的实际行驶距离。设视频图像的帧率为f,则目标车辆的行驶速度为:
①
1.2 相对速度法
相对速度法是以安装有车载式视频摄录设备的车辆行驶速度,间接求出目标车辆的行驶速度。相对速度法主要用于车辆高速行驶,且路面上没有合适的参照物选取的情形。如图2所示,取甲车身特征点Q为一个参考点,选取视频图像的某观察视角方向,确定该视角与乙车的交点在路面的投影点P,作为另一个参考点。
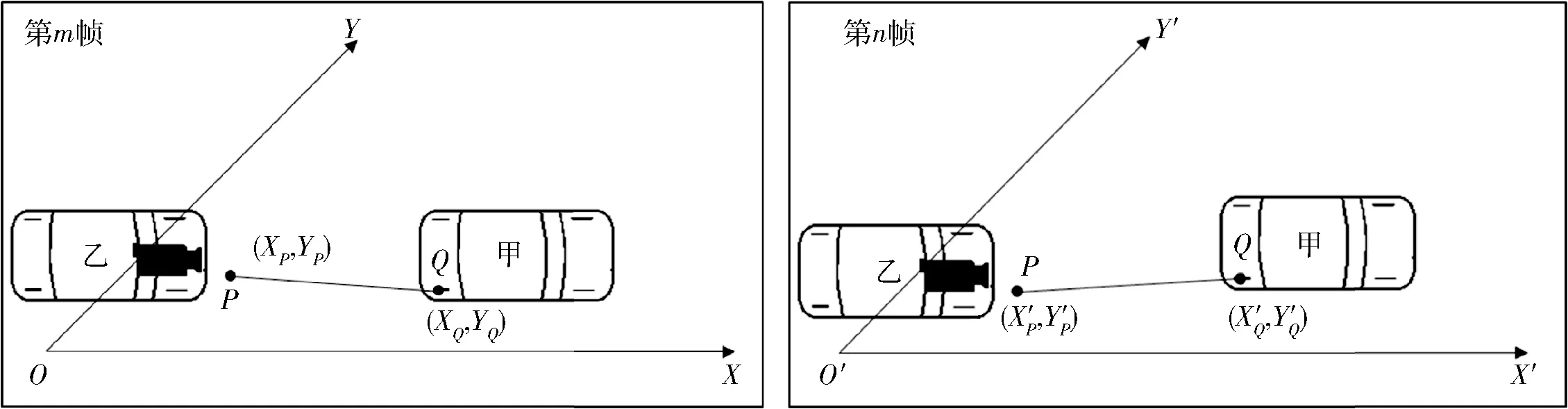
图2 相对速度法路面坐标系
由在第m帧和第n帧P点、Q点的路面坐标值,求出甲车和乙车的距离变化量ΔS,由ΔS得到两车的速度差值Δv:
②
因此目标车辆(甲车)的行驶速度为:
v甲=v乙+Δv
③
2 直接线性变换法车载式视频图像车速计算步骤
运用直接线性变换法,通过车载式视频记录仪得到移动车辆速度,可以分为观测视频图像的帧率、观测目标车辆的行驶距离、计算目标车辆的行驶速度3个步骤。
2.1 观测视频图像的帧率f
确定视频图像帧率常用方法的有逐帧播放法和直接获取法两种。逐帧播放法是利用播放器的逐帧播放功能,观测视频显示时间从某秒开始至该秒结束,这一秒钟内视频共包含的图像帧数。直接获取法是通过播放软件的视频图像文件属性分析功能,直接获取视频文件帧率,这种方法较适用于帧率稳定的视频图像。
在实践中发现,车载式视频相对于固定式视频,受到外界环境干扰和摄录设备质量等因素影响,极易出现“丢帧”现象[11]。帧率不稳定主要存在以下两种情形:一是视频摄录设备在信号传输存储不稳定,造成视频显示时间不准,这种情形可以通过具有时间较准功能的播放器进行校准,以校准时间作为计时依据;二是视频摄录设备在压缩编码存在“丢帧”现象,这种情形画面播放不连续,引起帧率不稳定。车载式视频图像“丢帧”处理难度较大,若“丢帧”不严重,可以结合目标车辆行驶距离跳跃大小判断丢帧数量。
2.2 观测目标车辆的行驶距离
采用绝对速度法给目标车辆定位时,分析截取的两个关键帧画面,至少在路面上找到4个已知相互间距的参考点作为摄像机参数标定点,根据标定点的像平面坐标和路面坐标,利用直接线性变换方程分别得出两个关键帧画面的像机标定参数值。由甲车身特征点、路面参照物点在两个关键帧的像平面坐标值,运用直接线性变换方程进一步求出对应的路面坐标值。
采用相对速度法定位目标车辆时,首先要测算出安装有车载式视频摄录设备车辆的行驶速度,关于该行驶速度计算方法本文不作介绍,读者可以参阅《基于视频图像的车辆行驶速度技术鉴定》(GA/T 1133—2014)附录C相关内容。两车的车身特征点在不同关键帧所对应的路面坐标值测算方法,与之前绝对速度法中甲车身特征点、路面参照物点测算类似,不作重复。
2.3 计算目标车辆的行驶速度
根据所采用的目标车辆定位法,分别代入到公式①或公式②、③后求出目标车辆的行驶速度。
3 直接线性变换法车载式视频图像车速计算案例
3.1 绝对速度法案例
案情摘要:某日08时41分许,戎某驾驶小型轿车沿**市**区高速接线由北向南行驶时,与同方向行驶的吴某驾驶的二轮电动车发生碰撞的道路交通事故,造成吴某及二轮电动车后面乘客陈某受伤、两车受损的道路交通事故,整个事故发生过程由小型轿车行车记录所拍摄到。为了准确认定交通事故责任,交警部门要求鉴定事故中两车的行驶速度。
本案例采用《基于视频图像的车辆行驶速度技术鉴定》(GA/T 1133—2014)附录C所提供的方法,可以计算出小型轿车的行驶速度,但无法精确计算出二轮电动车速度,需要采用直接线性变换法给二轮电动车准确定位。具体计算过程如下:
(1)观测视频图像帧率:经对该车载式视频图像进行检查,视频画面播放流畅,具有25帧/秒的稳定帧率。

图3 绝对速度法参考点路面坐标系
(2)观测目标车辆的行驶距离。选取视频显示时间分别为“00:09:13”第22帧、“00:09:14”第5帧两个关键帧。如图3所示,在视频显示时间为“2017/06/01 00:09:13”第22帧:在道路分界线上选取A、B、C、D 4个标定点,以A点为原点、AD连线为X坐标轴、AB连线为Y坐标轴,建立地面直角坐标系。根据道路分界线尺寸及车道宽度,可得到A、B、C、D 4个标定点地面坐标值(X,Y)所对应的像平面坐标值(x′ , y′),代入直接线性变换方程,计算出视频处于该帧时行车记录仪像机标定参数值。选取参考点M和参考点N,N点为目标车辆后轮与地面的接触点,M点则位于DC连线延长线上,且MN与DC相互垂直。根据N点和M点像平面坐标值,求出对应的路面坐标值。用同样方法,进一步求出在视频显示时间为“00:09:13”第22帧时参考点P点和参考点Q的路面坐标值,如表1所示。
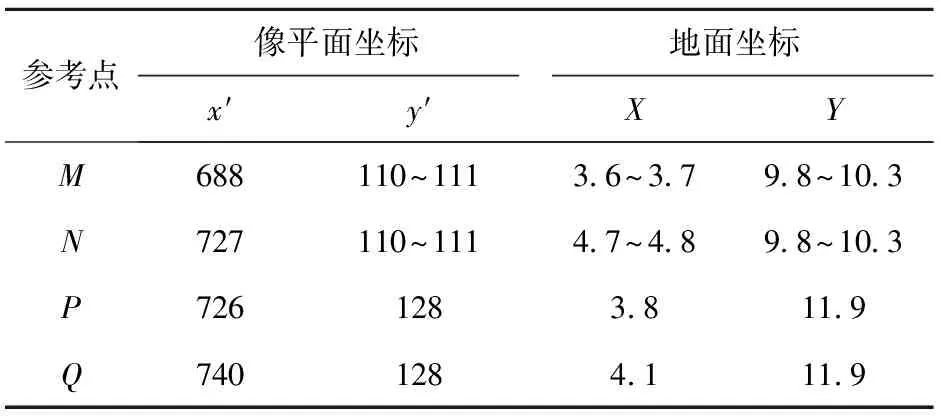
表1 绝对速度法参考点坐标值
图3中点C与点G实为同一条道路分界线的同一点,根据C、G、M、N、P、Q6个参考点的地面坐标值,利用平面上两点距离计算方法,可以得到:PQ、MN、PM的长度。由几何关系,进一步可计算得到被鉴定车辆后轮先后通过N点和Q点的行驶距离为1.78~2.26 m之间。
(3)计算二轮电动车行驶速度:视频图像中,二轮电动车后轮从N点行驶Q点的所用图像帧数为8帧,可计算出二轮电动车通过参考点N和参考点Q的行驶速度为20.2~25.4 km/h。
3.2 相对速度法案例
案情摘要:某日08时23分许,陈某驾驶小型越野客车沿某一级公路由北向南行驶至一村道路口处时,与郑某骑行的二轮电动车发生碰撞,导致郑某受伤及两车受损的道路交通事故,事故发生整个过程由被小型越野客车后方轿车上的行车记录仪拍摄到。事故中小型越野客车有超速嫌疑,交警部门要求对该车行驶速度进行鉴定。本案例中由于小型越野客车距离安装行车记录仪轿车较远且行驶速度快,不能用传统的视频图像车速计算方法,用绝对速度法计算小型越野客车的行驶速度难度也较大,故可以采用相对速度法计算小型越野客车的行驶速度。具体过程如下:
(1)观测视频图像帧率:对该车载式视频图像进行分析,视频画面播放流畅,具有30帧/秒的稳定帧率。
(2)观测安装行车记录仪轿车行驶速度:根据《基于视频图像的车辆行驶速度技术鉴定》(GA/T 1133—2014)附录C提供的方法,可以测算出轿车的行驶速度约为85.3~86.8 km/h。
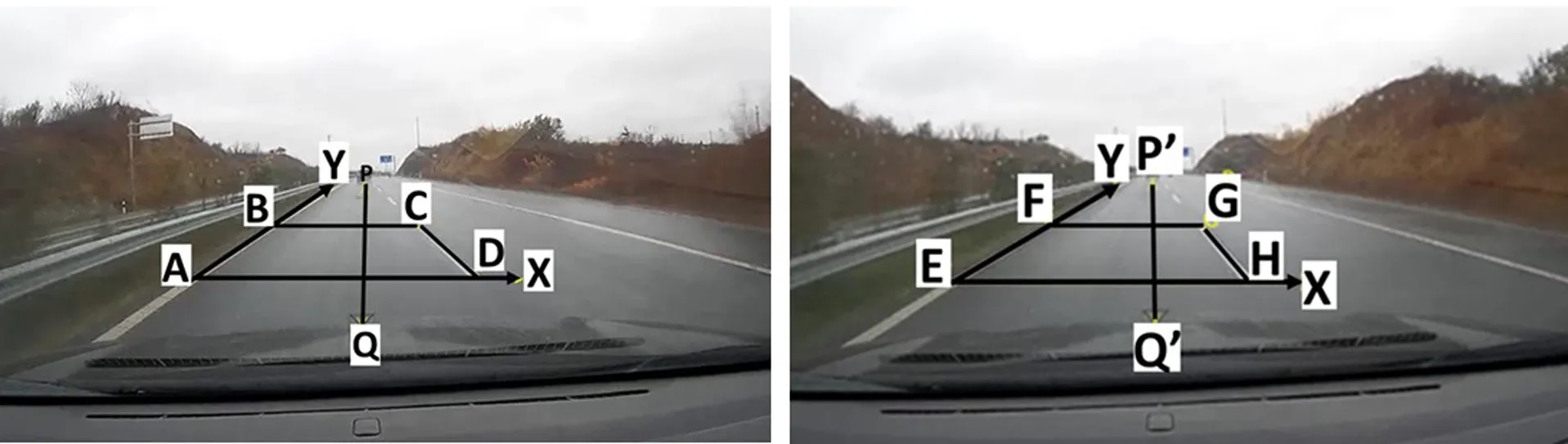
图4 相对速度法参考点路面坐标系
(3)观测小型越野客车与轿车的距离变化情况:截取视频图像显示时间为“08:27:11”第1帧、“08:27:12”第28帧作为两个关键帧,两个关键帧共相差57帧,如图4所示。
在两关键帧路面上各选取4个标定点,根据标定点像平面坐标和路面坐标,运用直接线性变换法对摄像头参数进行标定。分别选取小型越野客车的车尾在地面投影线的中点(图中P/P′)、某观测视角与轿车的交点在路面的投影点(图中Q/Q′)为参考点,根据参考点的像平面坐标,运用直接线性变换法求出参考点的路面坐标系值,结果如表2所示。
(4)计算小型越野客车行驶速度:由表2参考点坐标值可知,在57帧时间内小型越野客车和轿车的间距增加了约1.7 m,因此根据相对速度的关系,可以求出小型越野客车的行驶速度为88.5~90.0 km/h。
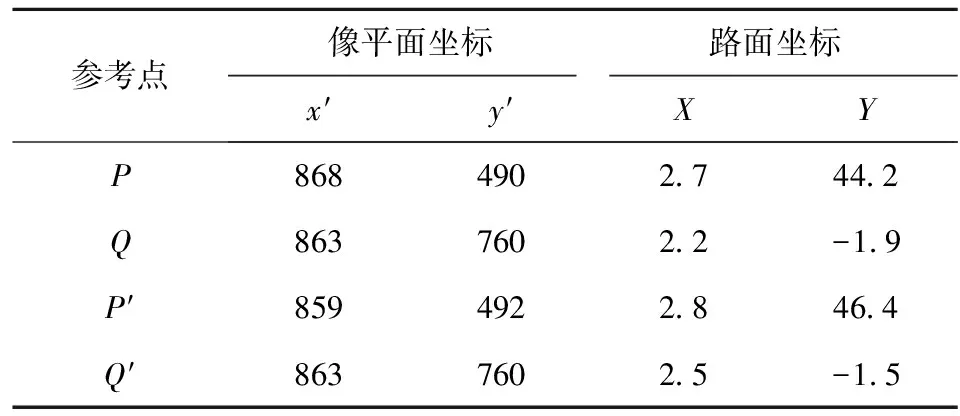
表2 相对速度法参考点坐标值
4 结束语
直接线性变换法是视频图像车辆行驶速度鉴定中车辆定位的一种有效方法,常被用于固定式视频图像的车速度测算中。然而通过对车载式视频图像多个关键帧分析,多次运用直接线性变换法观测行驶车辆的行驶距离,实现对车载式视频图像中行驶车辆的速度测算,进一步拓宽了车载式视频图像在车辆行驶速度鉴定中的应用范围和使用价值。在实践操作中,为了提高车辆速度鉴定结果的精度,需要注意以下4个环节:
(1)截取的关键帧画面要能够清楚显示目标车辆的行驶轨迹和路面上的标定点,尽可能选取安装有车载式视频摄录设备的车辆和目标车辆距离接近的关键帧画面,减少因标定点、参考点像平面坐标值精度不高而引起的计算结果误差。
(2)选取的摄像机参数标定点的连线,尽可能相互垂直或平行,这样可以因减少标定点的路面坐标精度不高引的误差,比如选取道路上的人行横道路线、道路分界线等标线上的点作为标定点。
(3)在视频图像车速鉴定中,采用的是二维直接线性变换,这就要求标定点、参考点要在同一个道路平面上,否则车速测算结果误差会比较大。比如选取路面投影点、车轮与路面的接触点等作为参考点或特征点。
(4)目标车辆行驶速度取值宜取阀值,充分考虑因直接线性变换过程因计算方法、标定点、参考点坐标数度等引起的速度计算误差,提高车速计算结论的准确性。比如,在给较远的车辆特征点标定像平面坐标时,难以精确得到像平面坐标值,可以将坐标值设为一个区间,根据线性关系,得到的路面坐标值也是相对应阀值,目标车辆行驶速度最终计算结果是一个阀值。
实践表明,只要处理好以上4个环节中注意事项,车速测算结果符合事故车辆车速鉴定精度要求。此外,将直接线性变换法运用到车载式视频图像,还可以判断出视频中车辆与车辆之间的方位关系,为交通事故责任认定提供帮助。
