采用加速度传感器测定竖向步行力的试验研究
2019-01-23宋志刚王子洋
王 琪, 宋志刚, 王子洋
(昆明理工大学 建筑工程学院,昆明 650500)
大跨轻质结构的使用,使得人致结构振动问题受到广泛关注[1-2],而步行力的测定是其中一个非常重要的问题。目前测定步行力的方法主要有两类,一类是出现较早、运用较广并可以直接测定步行力的测力板、步态机以及测力平台等[3-5],另一类是可对人体自由行走时产生的足底力进行实时观测的测力鞋[6-7]和测力鞋垫[8-10]等。测力板本身体积庞大,位置较为固定,对测试者的自由行走造成一定限制,不利于范围较大的动态监测,同时由于仪器适用于室内,不适于在室外进行大规模观测。采用测力鞋或测力鞋垫测定步行力时,试验对象只需穿戴好设备并保持正常行走,足底的压力传感器就能将足底压力转换为电信号输出,设备穿戴灵活方便使用。但是人体行走过程中身体的晃动和足部的滑移使得鞋垫本身容易发生移动,将传感器设置在柔性鞋垫上还可能导致传感器信号失真,同时仪器本身价格昂贵不适于进行人群的大范围观测。
基于上述原因,同时考虑到无线传感器造价越来越低,本文提出将加速度传感器安置在人体质心处,通过测定人体质心加速度来间接测定步行力的方法,通过对试验对象进行步行力试验进而得到了相应的步行力,在此基础上,将试验结果与生物力学模拟结果和已有的测力板试验数据进行对比,以验证测试方法的有效性。
1 加速度传感器测定步行力
1.1 试验原理
依据生物力学模型,人体可简化为一个双质点体系,其中人体质量集中于上躯干和下躯干两个质心处,双腿简化为无质量杆,如图1所示。人体在重力、惯性力和足底反力下的平衡方程为
(1)

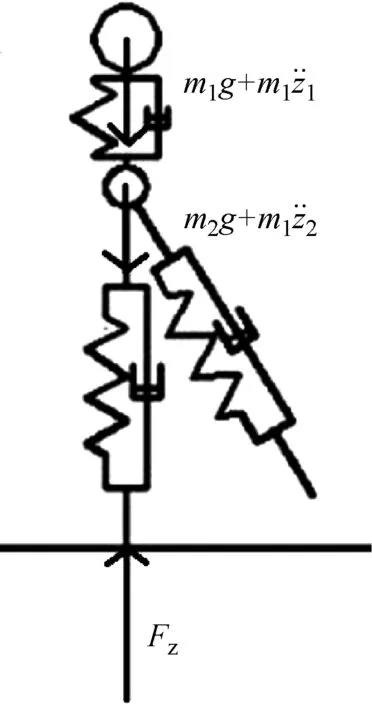
图1 力学分析图
1.2 试验方法
人体加速度监测系统包括加速度传感器、穿戴背心、控制器和导线四部分,控制器包括开关装置、数据采集器和数据存储器三部分,设计构造和实物图如图2所示。

1-加速度传感器;2-穿戴背心;3-控制器;4-导线;5-数据存储器;6-电源开关
(a) 设计构造

(b) 实物图
为了能同时获得不同方向的步行力,本文采用无线三轴加速度传感器来测定质心加速度,加速度传感器的各项性能参数选择可参照表1,试验所使用的加速度传感器如图3所示,其中加速度传感器的Y轴的正方向对准身体前进方向,Z轴的正方向对准在身体的垂直轴向上方向,X轴的正方向对准身体左侧方向。
加速度传感器分别布置于人体上下躯干质心m1和m2处。研究表明腰(腹)部是最接近人体质量中心的位置,受到的振动干扰比较小,且加速度输出信号比较平缓,即使在快速行走时规律性也比较明显,因此将两组加速度传感器置于胸椎与腰椎之间的位置。为了能有效地将加速度传感器固定于人体,本文采用紧身背心安置加速度传感器,背心本身紧贴身体并能有效防止错动,并将加速度传感器固定于背心上。

表1 加速度传感器性能参数


图3 加速度传感器
研究表明人体的运动频率基本位于20 Hz以下,而99%的能量都集中在15 Hz以下[12]。低通滤波器可以允许低于截止频率的信号通过。巴特沃斯滤波器在通带内频率响应平坦,阻带内逐步减小为零,同时阶数越大,频幅特性和信号保真度越好。因此选用巴特沃斯低通滤波器,设定通带下限截止频率为15 Hz,下阻带截止频率为20 Hz。
1.3 试验过程及试验结果
试验场地位于某教学楼走廊内,走廊长度为60 m,宽度为2 m,地面平整,无环境干扰。选定三名身体健康,无足部疾病的男性测试者,体重及腿长分别如表2所示,且上述参数基本接近于中国成年男性人体特征平均值。给测试者穿戴好人体加速度监测设备,穿戴好设备后测试者首先进行一分钟的适应性行走,待行走稳定、适应仪器后,测试者站在起点处,启动仪器,开始沿着走廊匀速行走,走到终点时转身,最后匀速走回起点,试验过程中由旁侧人员记录行走时间及行走步数。按照上述的步骤,测试者分别进行慢速到快速的多次行走,试验情况如图4所示。对试验数据进行处理,计算得出平均速度、步长、步频和周期,结果如表3~表5所示。

图4 步行力荷载试验情况

测试者身高/m体重/kg腿长/m测试者11.77650.94测试者21.74600.91测试者31.75700.92
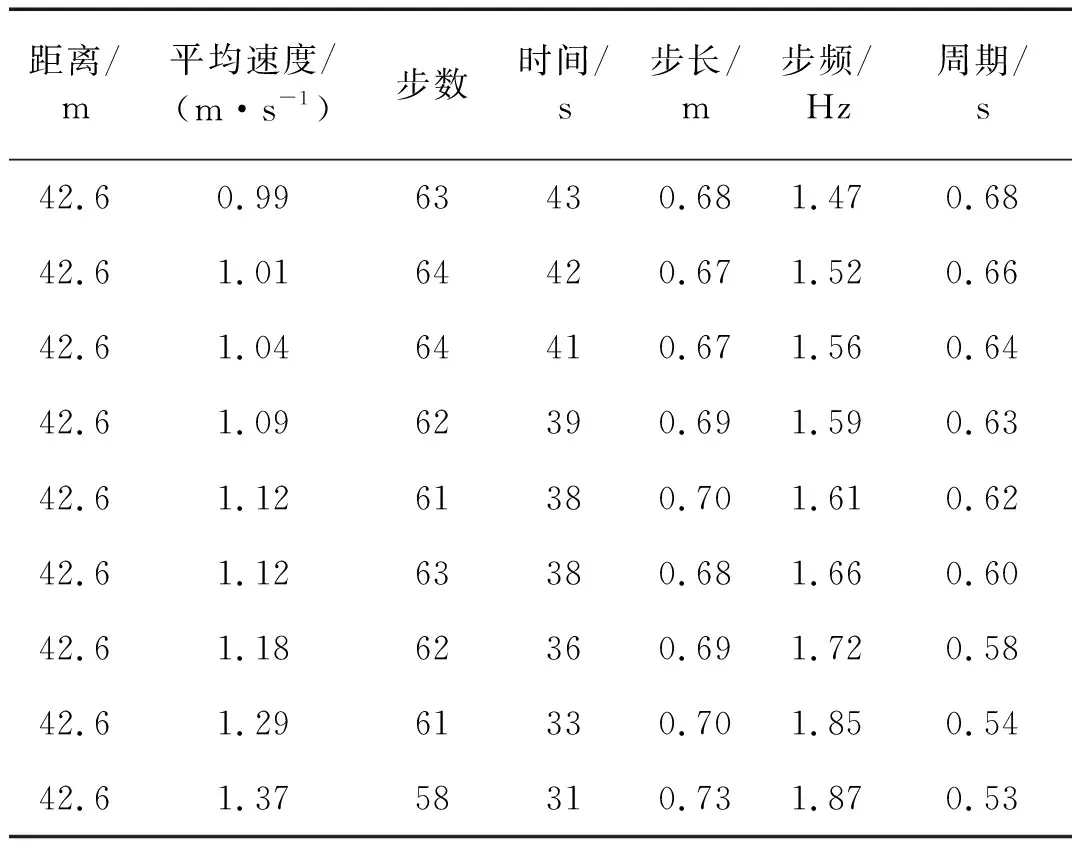
表3 测试者1在不同速度下行走的试验数据

表4 测试者2在不同速度下行走的试验数据

表5 测试者3在不同速度下行走的试验数据
从上面各表中的试验数据可以看出,即使身体特征参数接近,不同的测试对象由于行走习惯和姿态不同也会在平均速度、步长、步频和周期等特征上表现有所不同。但可以看出,不同测试对象都有随着平均速度的增大,步频增大的趋势。
将测试者1步频为1.85 Hz和测试者2步频为1.86 Hz时的试验数据通过图像形式导出,并通过傅里叶变换经MATLAB自带的巴特沃斯滤波器滤波后的曲线如图5所示。对比两名测试者的竖向步行力曲线可以看出曲线虽然有所波动但大小基本保持一致,且随时间变化表现出了相似的规律,则后文主要针对测试者1的试验数据进行讨论。


图5 竖向步行力时程曲线及其频谱特性
2 与生物力学步行力模拟结果的比较
步行力可以采用生物力学的双足模型进行模拟[13-14]。双足模型将人体简化成图1所示的力学模型,文献[13]根据虚功原理由拉格朗日方程建立的该模型的运动微分方程为

(2)
式中
(3)
(4)
(5)
F(t)=[k1lb-m1g-k1lb-m2gFctrl]T
(6)
(7)
(8)

一般的双足模型没有考虑人在实际行走时足底压力中心的偏移,导致模拟结果较实际步行力偏大。文献[15]通过λ模拟不同步行速度下足底压力中心的偏移对双足模型进一步修正,使其在不同的行走速度下具有较好的模拟结果。文献[16]中关于人行走过程中单腿支撑阶段足底压力中心偏移位移的经验表达式为
(9)
式中:xcop为足底压力中心的偏移位移;d为单腿支撑阶段压力中心总偏移量,取常数0.15 m;ω为单腿支撑相频率,相关研究表明ω随步行速度增加而增加,并与简化的人体重量-弹簧系统的自振频率ωn的关联性很高,且在自然行走状态下有ω=ωn。

(10)
在MATLAB下编制基于修正双足模型的模拟程序,模拟可得到测试者1在不同平均速度下的步行力模拟结果,见表6所示,并得到测试者1在步频为1.56 Hz时竖向步行力的试验值和软件模拟值的比较结果,如图6所示。

表6 测试者1在不同速度下行走的模拟结果

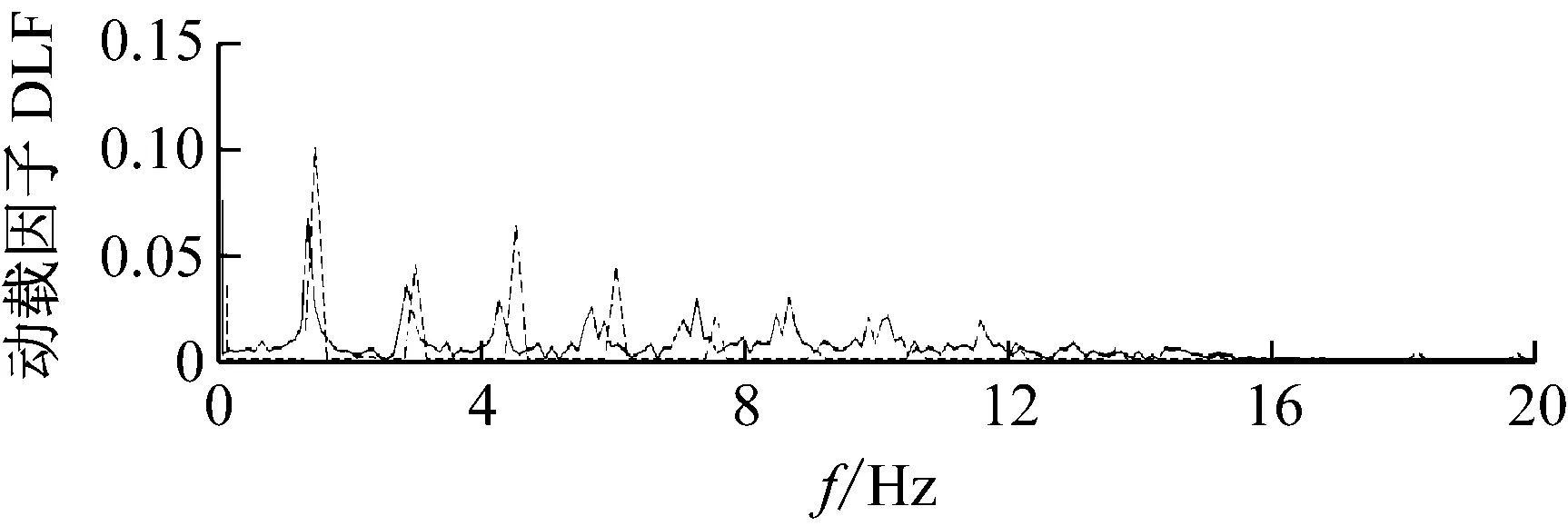
图6 试验值与模拟值比较
3 结果对比和分析
为了进一步验证本文试验方法的有效性,本文选取了文献[4]的研究结果作进一步的对比和分析。文献[4]给出了基于东方人体特征参数在测力板试验基础上通过概率统计获得的动载因子的统计值,见表7。其中μm和μ75分别为文献[4]统计出的各阶动载因子的均值和具有75%保证率的取值与步频f的关系式。
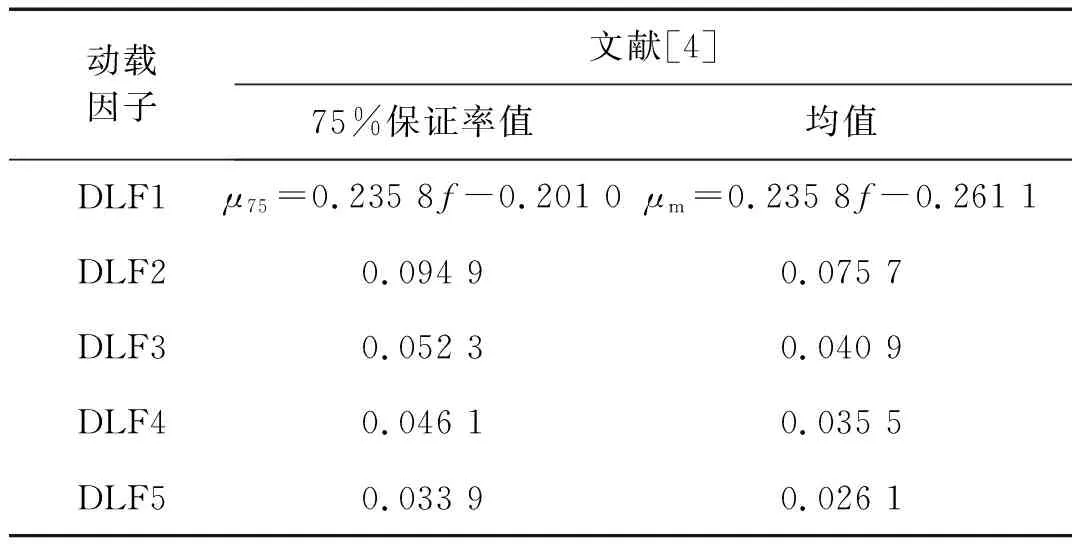
表7 文献[4]步行力动载因子试验统计值
测试者1的竖向步行力各阶动载因子的试验值、软件模拟值与文献[4]的试验统计值的对比结果如图7所示。由图7可知,一阶动载因子都有随着步频的增加而增加的趋势,二到五阶动载因子随着平均速度的增加变化不明显。图7(a)表明,竖向步行力一阶动载因子的试验值曲线、模拟值曲线和文献[4]试验统计值曲线都呈现随步频增加而逐渐增加的趋势,且数值相差不大。图7(b)~图7(d)表明,二至四阶动载因子曲线随步频无明显变化,试验值虽有波动但大小均保持在一定范围内。
综上所述,本文选用的试验方法可以得出实际的竖向步行力,并且通过比较表明各阶动载因子的试验值与已有测力板试验值基本一致,其偏差也保持在合理范围内,因此本文提出的通过测定人体质心加速度来测定步行力的方法可以有效模拟步行力,并且能够反映出步行力频谱特性变化的基本规律。

(a) DLF1

(b) DLF2

(c) DLF3
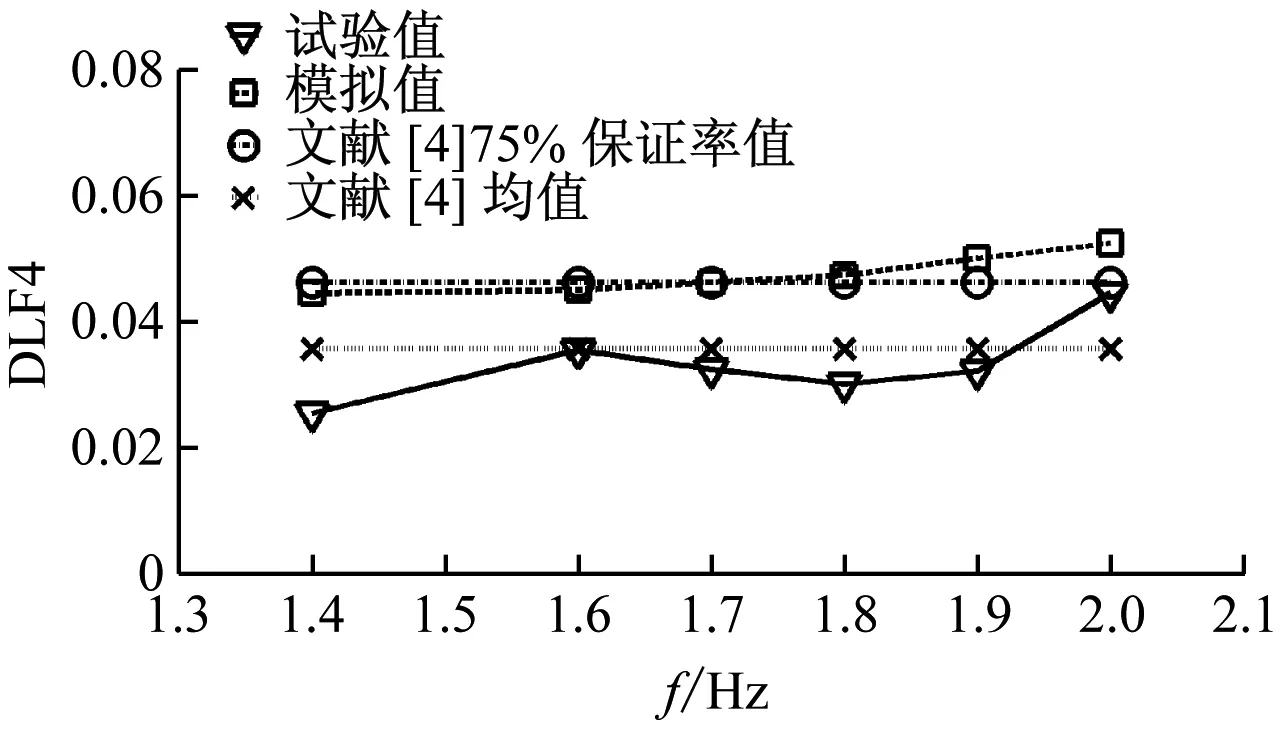
(d) DLF4

(e) DLF5
4 结 论
利用三轴加速度传感器测定人体的双质心加速度获得了人体在不同步频下的竖向步行力,并分析了测试者的竖向步行力的一至五阶动载因子随着步频变化的一般规律。主要结论如下:
(1)采用本文方法测定的竖向步行力一阶动载因子随步频增大而增大,二至五阶动载因子几乎无变化或变化较小,这与测力板试验结果一致,与生物力学模拟结果也相吻合。
(2)本文提出的测定方法还存在误差,可能来自于试验过程中仪器的松动和偏转,在后续研究中会予以考虑和改进。
