大范围变载直驱系统的速度滑模控制与扰动补偿研究*
2019-01-23刘伟业杨庆东
刘伟业,杨庆东,张 彤
(北京信息科技大学 自动化学院,北京 100192)
0 引言
现在高档数控机床中对大加速度、高精度、长行程直线进给系统的要求越来越高,而传统的旋转电机+滚珠丝杠已难满足要求,取而代之的是结构简单、高功率密度、高效的永磁直线同步电机(Permanent Magnet Linear Synchronous Motor,PMLSM)构成的直驱系统。但是由于直驱系统中负载扰动会毫无衰减地作用到PMLSM上。所以这就要求永磁同步直线电机构成的直驱控制系统在稳定的基础上,还要具有较强的抗扰能力和较快的响应速度。由于PMLSM构成的直驱系统是高阶非线性的,所以不依赖控制对象、设计简单、响应速度快、抗扰性能强的滑模变结构控制在直驱进给伺服系统中的到了广泛的应用。但在大范围变载情况下滑模控制器中切换系数的大小对伺服系统抗扰性和抑制抖振的影响是相互矛盾的。
相关领域的专家为此做了大量研究。其主要策略包括趋近率[1]、积分滑模面法[2]、智能控制法[3-4]等。文献[5-6,12]引入负载观测对负载进行前馈补偿,提高系统的抗扰性和响应速度,但负载观测器对系统参数波动的鲁棒性方面不足;文献[7]采用新型增益切换控制方法,削弱系统抖振,可能由于执行器件的惯性产生抖振;文献[8-9]将趋近率法引入同步电机矢量控制中,提高了系统的鲁棒性和快速性,但设计过程需要系统中的具体的相关参数。
本文为解决在大范围变载情况下滑模控制中切换系数引起的抖振和抗扰性相矛盾的问题,首先设计了速度滑模控制器,其次为解决上述矛盾,以及负载观测器的鲁棒性的问题设计了闭环滑模负载观测器,最后对观测的负载进行前馈补偿,并进行了仿真实验验证,为提高数控机床的抗扰性和稳定性的共同提高提供依据。
1 永磁直线同步电机的数学模型
PMLSM与旋转永磁同步电机相似,在动子中通入三相对称电流后,在动定子间隙中产生沿直线运动的磁场,被称为行波磁场。行波磁场与定子永磁体相互作用产生水平方向的电磁推力。

图1 PMLSM的参考坐标系
如图1所示,建立同步旋转d-q坐标系下的PMSLM的动子电压方程[10]。
(1)
式中,f为永磁体和动子交链磁链;R为定子绕组电阻;Ld、Lq分别代表d、q轴的电感;ud、id、uq、iq分别代表d、q轴的电压和电流分量;we为电角速度。

(2)
式中,v为动子的线速度;τ为极距。
其水平方向的电磁推力方程为:
(3)
式中,Fe为PMLSM的电磁推力。对于面贴式的PMLSM有Ld-Lq,则式(3)可简化为:
Fe=Kfiq
(4)
(5)
PMLSM的机械运动方程为:
(6)
式中,M为动子质量;Bm为粘滞摩擦系数;FL为负载阻力。
2 速度滑模控制器的设计
2.1 状态空间方程
本文采用id=0的矢量控制方法,在速度控制系统中将iq定义为控制输入,定义PMLSM速度v的误差为状态变量:
e=v*-v
(7)
u=iq
(8)
式中v*为给定线速度。
由式(3)~式(6)得速度控制系统的状态空间方程:

(9)

当PMLSM参数发生变化时,速度控制系统的状态空间方程:

Ae+Bu+E′
(10)
式中E′=ΔAe+ΔBu+E。
2.2 积分分离的滑模面设计
采用积分滑模面[14]不仅能够消除系统静差,而且还可以消除滑模控制律中的二阶导数。但在系统出现较大偏差时,会出现积分饱和现象,系统会出现大超调,影响伺服控制性能,所以本文采用积分分离的滑模面,当系统误差较大时取消积分作用,以防积分过饱和出现;当误差较小时引入积分,以消除系统静差。其积分分离的滑模面:
(11)
式中,σ为误差阈值,c为积分常数。
2.3 趋近律选取
目前常用的趋近律有恒速趋近律、指数趋近律、幂次趋近律、一般趋近律等[11],其中指数趋近律应用最为广泛,其表示为:

(12)
式中,ε为恒速趋近律系数,且大于零;η为指数趋近律系数,且大于零,可见在大范围变载的直驱系统中需要较大的ε,才能保证系统的鲁棒性,但是这容易产生高频抖振
2.4 求取控制律及鲁棒性分析
根据式(9)~式(11),将E′视为未知扰动,可以求取速度环滑模控制律为:
(13)
根据李雅普诺夫稳定性判据,滑模控制系统的存在性和可达性条件:
(14)
由式(10)~式(14)可得:
V·(e)=s(-εsgn(s)-ηs+E′) ≤
-|s|(ε-|E′ | )-ηs2
(15)
由式(15)可知,当ε>|E′ |时,即可保证控制系统的存在性和可达。
3 负载扰动前馈补偿
3.1 负载扰动滑模观测器设计
根据机械运动方程(6),将电磁推力定义为观测系统的输入,将负载阻力FL和电角速度we定义为状态变量,且电角速度we为系统输出,假定负载阻力FL为定值,可以得到系统的扩张状态空间方程:
(16)

将外部阻力FL和电角速度we看作观测对象,则滑模负载扰动观测器:

(17)

将负载和电角速度的观测误差:
(18)
(19)
将式(16)和式(17)相减得到负载观测误差方程:

(20)
采用积分分离的滑模面,既可以消除稳态误差,提高观测精度,又可以避免因积分饱和引起的大超调,则关于角速度误差的积分分离的滑模面:
(21)
式中,cw>0的积分系数,ewth为积分分离的阈值。
因为指数趋近率可以在保证快速趋近的同时还可以较小观测系统的抖振,因此设计关于ew的指数趋近率:
(22)
式中,εw为大于0的切换增益系数,ηw为大于0的指数趋近率系数。
将eF视为扰动联立式(20)~式(22)可得:
(23)
3.2 负载扰动滑模观测器的稳定性验证
根据李雅普诺夫稳定性判据,结合式(20)~式(23)可得:
(24)
3.3 带负载补偿的速度滑模控制器

(25)
式中,kL为速度滑模控制律的推力补偿系数,根据上式可得速度环控制器的李雅普诺夫稳定判据:
(26)
则只要满足:

(27)
所以选取较小的速度环的切换系数就可以保证系统的稳定,且可以削弱速度的抖振。由于观测器以及前向通道各环节都有一个时间常数,选取KL过大可能造成系统更大的振荡,甚至不稳定;选取过小的KL,会造成补偿效果不明显,所以要妥善选取KL。
4 仿真与结果分析
在SIMULINK环境下搭建PMLSM伺服系统的仿真模型, PMLSM的参数如下:极对数Pn=10,动子质量M=0.1kg,定子相电阻R=0.7Ω,交轴电感Lq=0.013H,直轴电感Ld=Lq,永磁体磁链ψf=0.046wb,动子有效长度L=0.2m。本文分别针对PI、滑模、带扰动补偿滑模的速度控制策略的鲁棒性、抗扰性及调整时间进行对比讨论。根据式(13)搭建速度滑模控制器;根据式(17)、式(25)搭建负载观测器。

图2 PMLSM负载变化曲线
图2为负载阻力曲线;图3为分别采用PI和滑模速度控制器,分别在0.1s和0.2s时加入5N的负载阻力PMLSM的速度响应曲线。可以看出在空载和轻载时滑模控制策略较PI控制取得了较快的响应速度,在高负载段性能欠佳,在空载段速度存在较大的抖振,这说明了增加切换系数保证了系统的抗扰性,却使系统产生了不利的抖振。

图3 采用PI和滑模速度控制器的速度响应曲线
图4为分别采用滑模控制和添加扰动补偿的PMLSM速度响应曲线。可以看出添加扰动补偿后在空载和轻载段的速度抖振问题明显减弱,抗扰性和相应速度都明显提高,且在高载段的相应也更加优异,这体现了添加扰动补偿技术的优越性。

图4 滑模控制和添加扰动补偿的速度响应曲线
图5为分别采用PI和滑模速度控制器PMLSM电磁推力的相应曲线,可见滑模控制器电磁推力的响应较快,这是速度响应快的根本原因,但在空载和轻载段电磁推力存在较大的抖振,这是速度抖振的根本原因,体现了在大范围的情况下单纯的滑模控制策略的不足。
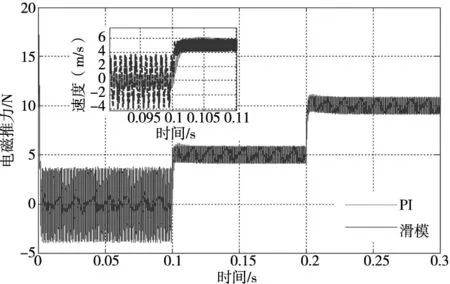
图5 采用PI和滑模控制器PMLSM的电磁推力曲线
图6为分别采用滑模控制和负载前馈补偿PMLSM电磁推力的响应曲线,可见加负载前馈补偿的电磁推力在出现速度误差与负载大范围变化的情况下,可以迅速响应,并且抖振有了明显的减弱,这是滑模控制与负载扰动补偿优越性的根本原因。

图6 采用滑模控制和负载补偿PMLSM电磁推力曲线
5 结束语
单独采用滑模控制策略虽然较PI控制可以取得较快的响应速度,但是其切换系数的选取会造成响应速度和稳定性之间的矛盾,尤其是在大范围变载直驱系统的情况下这种问题更为突出。所以本文引入滑模负载观测前馈补偿的策略,在速度滑模控制器选取较小的时,既可以较小抖振,又可以提高PMLSM的响应速度,实验仿真结果验证了此方法的合理有效性。
