五转向架磁浮车辆转向机构的结构分析与设计
2019-01-19
(北京磁浮交通发展有限公司长沙分公司,长沙 410003)
0 引言
中低速磁浮交通技术是依靠电磁力将列车悬浮,利用直线电机驱动的轨道交通技术,运行时速为100~120公里。具有噪声低、环保性能好(距线路10米处不高于64分贝)、线路适应性强(正线转弯半径75米,爬坡能力70‰)、乘坐舒适、运行安全可靠,建设、维护成本低、运营效益好等特点。适用于大中城市市内、近距离城市间和旅游景区的交通连接。
磁浮交通由于列车悬浮在轨道运行,从而没有了轮轨激烈摩擦的噪声,与传统轨道线路比,中低速磁浮列车转弯半径小、爬坡能力强,同时噪音低,穿梭在城市楼群间能“悄然而至”。
磁浮交通作为新型轨道交通制式具有安全度高、性价比好、适应性强,且低噪音、低辐射,环境友好,在北京S1线和长沙机场磁浮线的示范效应下,磁浮交通已经成为国内外许多城市选择。
为使磁浮车辆能在城市楼群间能“悄然而至”,磁浮列车需要借助转向机构进入弯道,这是由于在弯道处单元模块和列车车体的相对位置决定的。因此基于现有的磁浮车辆及线路条件设计计算确定一个合适的转向机构是一项十分必要的工作。
1 转向机构的结构分析
五转向架中低速磁浮车辆设有两套转向机构,设置于1、2转向架和3、4转向架之间,转向机构主要由长转臂、短转臂、拉杆、钢绳等组成。

图1 转向机构直线段布局图

图2 转向机构安装图
长、短T臂分别在车体铰点处与车体销接,是转向机构的转动中心,长、短T臂通过钢缆相连,长拉杆的一端连接长、短T臂,另一端连接滑台。每节车共设置6组滑台,其中Ⅰ、Ⅲ、Ⅳ、Ⅵ位滑台通过线性轴承与车体底部连接,滑台只能相对车体横移;Ⅱ、Ⅴ位滑台与车体固定,左右滑台连线分别与车体纵向中心线的交点可视为列车通过曲线时的固定转心。Ⅰ、Ⅵ位滑台下连接一个空气弹簧,Ⅱ、Ⅲ、Ⅳ、Ⅴ位滑台下连接两个空气弹簧。滑台由线性轴承和防尘套组成,滑台在Y向可以与车体相对移动[1]。
转向机构直线段布局图如图1、图2所示。
1.1 列车弯道受力分析
列车以速度V沿半径为R的圆曲线运动时,产生离心力F 离为:

式中,M为车辆的质量(kg),V为过曲线行车的速度(m/s),R为平曲线半径(m)。
列车在弯道上主要受到来自车辆自身的重力mg和轨道的支撑力,当列车以额定速度在弯道上行驶,两者的合力会提供列车行驶的向心力来平衡离心力F离。(F离包括离心力和侧向风力)。

图3 列车弯道受力分析图(β为轨道超高角)
因此有:

1.2 滑台弯道横移分析
将滑台等效为一点,不考虑滑台尺寸、牵引杆偏转对悬浮架过曲线姿态的影响。首先针对在无迫导向机构作用下的平衡态,分析滑台位移L与曲线半径R的关系。Ⅱ、Ⅴ位滑台固定于车体,设其他滑台相对于车体横移至轨道最佳契合位置时,建立如图4所示的直角坐标系。直线AF表示车体纵向中心线,A、B、C、D、E、F分别表示Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ位两侧滑台中心连线中点,曲线表示轨道中心线,a、c、d、f表示模块在模块在轨道上的投影,轨道曲线半径为R,模块长度为a,Aa为L1′,Cc为L2′。
因此曲线方程为:

L1′:Ⅰ位滑台的横向移动距离:

L2′:Ⅲ位滑台的横向移动距离:

根据式(4)、式(5),当R=a时,L1′=2L2′。
结合转向机构结构特点,转向机构的T臂转动一定角度的情况下,Ⅰ、Ⅲ位滑台的横移距离比和Ⅳ、Ⅵ位滑台的横移距离比均为2:1。
1.3 滑台弯道左右滑台间距分析
列车通过弯道时,在转向机构的作用下,各走行单元与车体产生了不同相对位移,从而使模块和列车沿曲线分布达到最为合理。转向机构和空簧系统构成了走行单元的悬挂系统,当列车通过弯道时,其运动形态如图6所示。

图4 模块过弯道简图

图5 磁浮列车在通过弯道
由于通过曲线时同位左右滑台中心连线并非处于径向,使滑台间距增大。如图6所示,设轨道轨距为D=2000mm,弯道半径为R=50m,模块长度a=2650mm,同位滑台的横向间距为di,其间距增量为Δdi。
内轨道曲线为:

外轨道曲线为:

I滑台横向间距变化:

Ⅲ滑台横向间距变化:

1.4 转向机构弯道受力分析
当模块和列车沿曲线分布达到最为合理时,转向机构和T臂受力分析情况如图8、图9所示。

图6 磁浮车辆过弯道时模块和转向机构运动形态图
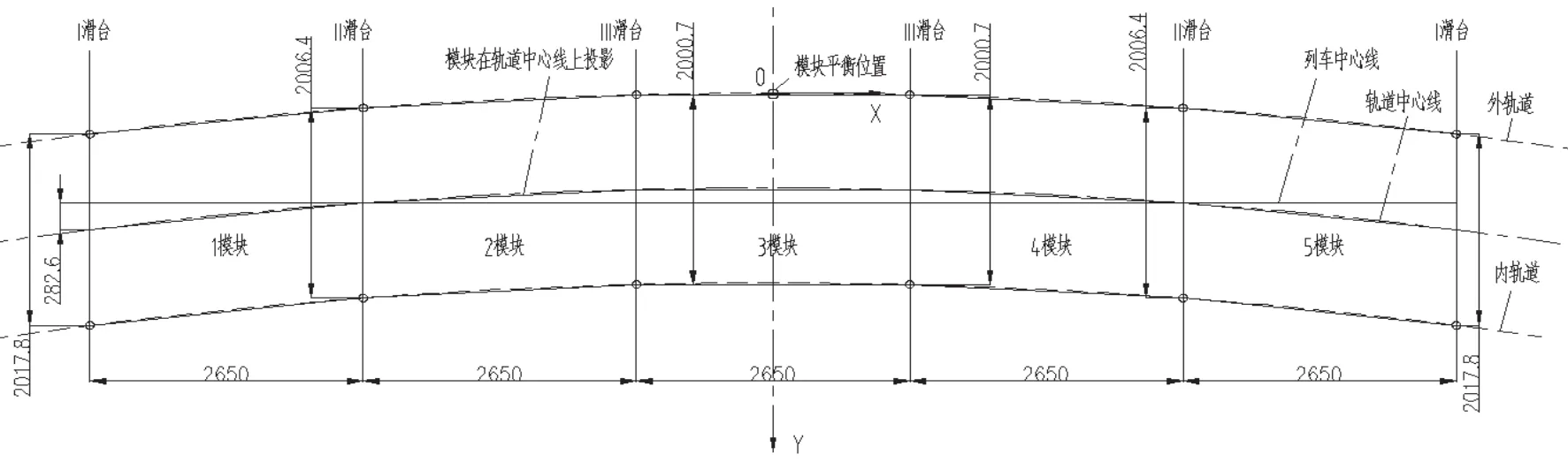
图7 列车过弯道简图(模块长度=2650mm)
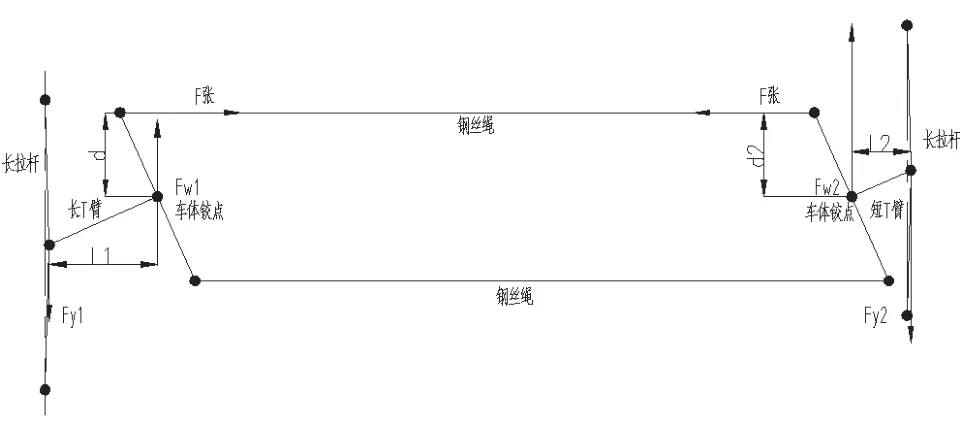
图8 转向机构受力分析

图9 T臂受力分析
根据图8、图9和力平衡原理有:

设Fy1、Fy2为Ⅰ、Ⅲ滑台产生横向力,Fw1、Fw2为转向机构对车体铰点产生的作用力,F张为钢丝绳上的作用力
综合式(10)~式(13)有:

设T臂转动角度为γ,长T臂长度为m1,短T臂长度为m2。

根据式(14)~式(16)有:

1.5 转向机构工作原理
根据滑台横移分析结果,Ⅰ、Ⅲ位滑台的横移距离比和Ⅳ、Ⅵ位滑台的横移距离比均为2:1。转向机构使各滑台的位移匹配、使滑台横移至轨道最佳契合位置所需的位移量,从而使各个模块沿曲线分布合理。
总的来说,转向机构在工作过程中的主要作用就是使各滑台的位移匹配、使所有模块受力状态相同,从而使各个模块沿曲线分布合理。
在转向机构的作用下,各模块的横向力的大小为:

当转向机构没有通过钢丝绳连接或者没有安装长拉杆,T臂和转向机构不能够传递横向力作用,只能够配合模块通过曲线时必须的横向位移,横向载荷只能通过Ⅱ、Ⅴ位滑台上的8个空簧传递。这时Ⅱ、Ⅴ位滑台上模块的横向力的大小为:

2 转向机构设计
2.1 机构设计——横移量计算
根据以上理论,设计如图10的转向机构,长T臂与短T臂的长度比为2:1,实线、虚线分别表示迫导向机构在列车通过直线和曲线时状态。
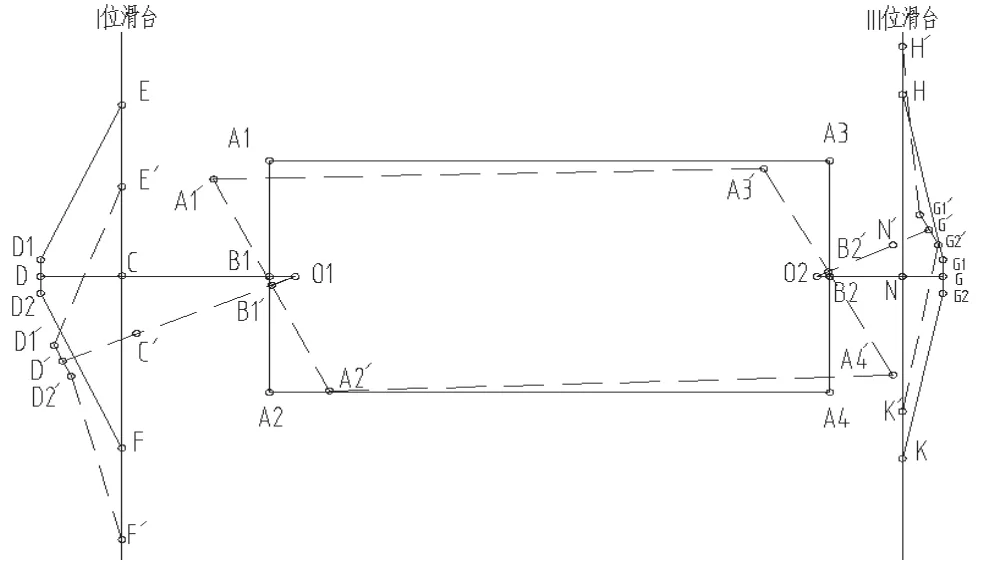
图10 转向机构示意图
点O1、O2为转心,与车体销接,通过曲线时臂OlD、O2G偏离车体纵向中心线,长T臂转角为α、短T臂转动角度为α′,点A1、A2、B1、D、D1、D2、E、F分别移至 ,点A 3、A 4、B 2、G、G 1、G 2、H、K分别移至
设:
s1、s1′分别为I位左右(图中上下)滑台相对车体水平横移量,而s2、s2′分别为Ⅲ位左右(图中上下)滑台相对车体水平横移量。点D横向位移为L1,点G横向位移为L2。I位滑台间距增量∆l1=E’ F’-EF,III位滑台间距增量:∆l2=H’ K’-HK。
对于长转臂有:

由式(22)~式(25)得:

同理可以导出出短T臂的:


由上可知,在转向机构的作用下,同一位滑台左右模块横移量并不一致。
几何角度来理解,简化转向机构的T臂,转向机构如图11所示。

图11 转向机构简化示意图

转向机构在曲线上配合滑台位移时,就是等腰三角形ΔDEF不断变化的过程。
2.2 机构设计——转动角度计算
在转向机构简图中做如图12所示的辅助线。

图12 转向机构示意图
设∠O1A2B1=1θ,∠O2A4B2=θ2,O1B1=h1,O2B2=h2,A1B1=A2B2=A3B2=A4B2=k,O1O2=L。由于钢丝绳不可伸长,因此有:

根据几何关系有:

综上,由于O1B1、O2B2的存在,所有长T臂和短T臂转动角度不一致。
3 转向机构计算与仿真
3.1 转向机构尺寸计算
为了使列车在转向机构的作用下通过曲线时达到或尽量接近平衡状态,以提高列车曲线通过性能。那么滑台平衡态Δdi与迫导向机构作用下的滑台间距误差∆li,该误差值越小,则越有利于车辆曲线通过。设上述误差为xi根据前述分析可得出:

一般情况下,b2、d1是定值,取b2=160mm、d1=865mm,由式(8)、式(9)有:

根据转向机构的工作原理和几何特点有:

由式(40)~式(47)可以算出转向机构的关键尺寸,如表1所示。
3.2 转向机构尺寸校核
将滑台等效为一点,不考虑滑台尺寸、牵引杆偏转对悬浮架过曲线姿态的影响。BE表示列车中心线,AF、CD表示列车左右模块理论中心线,竖向实线表示滑台和轨道对称线、双点划线表示轨道中心线。A′、C′表示模块1与轨道交汇点,D′、E′、O表示轨道曲线与轨道对称线的交点,H、K为A′、C′在轨道对称线上的投影点,AC=DE=2000mm,轨距为2000mm,轨道曲线半径R=50m。半列车过弯简图如图13所示。

表1 计算例(单位mm)

图13 半列车过弯道简图
根据图中几何关系有:AB=BC=EF=ED=1000mm;OE′=D′E′=1000mm,又有EF=E E′+ E′H,OE′=OF+ E′H,因此有OF=E E′,同理有OF=D D′,当R=50M时,由式(3)、式(6)、式(7)有:


Ⅰ位滑台的左右模块的位移分别为:
左模块:

右模块:
同理可得Ⅲ位滑台左右模块的位移分别为:
由以上公式,长短T臂的位移校核如表2中第2列数据。

表2 Ⅰ位滑台左右模块弯道位移(单位mm)

表3 Ⅰ位滑台左右模块弯道位移(单位mm)

表4 长T臂校核(单位mm)

表5 短T臂校核(单位mm)
由以上数据可知,Δl1的尺寸比较小,转向机构关键尺寸符合磁浮车辆运行要求。
3.3 转向机构仿真分析
本文以CMS04型磁悬浮车辆为基础,建立磁悬浮整车模型。
CMS04型磁悬浮车辆是由北京控股磁悬浮技术发展有限公司和国防科学技术大学联合设计研制,其在唐山试验线前后共运行了3万多km,最高运行速度可达110 km/h。
CMS04型磁悬浮车辆采用五转向架结构,转向架与车体间采用空气弹簧悬挂,利用横向滑台来实现车体与转向架之间的横向相对位移,使用两套迫导向机构来传递电磁导向力。磁悬浮单架车辆模型主要包括单转向架、车体、空气弹簧、横拉杆、纵拉杆、滑台等,适当调整车体模型,使其适应单转向架长度和重量。
基于篇幅的限度,本文在此不详述建模过程,同时可以参考相关文献[2],基于以上数据磁浮列车通过100m弯道的仿真结果如图13所示。
从图13可以看出长短T臂转动角度均在9.27°左右,此值与设计值9.837°存在6%的误差,在仿真运行范围之类。

图13 转向机构的长短T臂角度变化
4 结束语
本文针对中低速磁浮的转向机构进行了详细的结构分析,在确定以滑台间距误差∆li越小的目标的情况,进行了转向机构的具体尺寸计算,同时在整车模型上进行的机构的仿真分析,最终确定的转向机构的几何参数满足五转向架中低速磁浮车辆运行需求。
