基于数学计算的自动化控制模型设计
2019-01-19
(烟台汽车工程职业学院,烟台 265500)
0 引言
随着我国工业水平不断提高,机械设备越来越智能化,自动化控制设备作为机械设备的主要控制设备,也需提升自身各项性能来满足社会需求。在机械设备正常工作时,自动化控制设备的任务是对机械设备进行合理调度,使其能够有序进行机械加工。除此之外,自动化控制设备还能增强机械设备的应用性能,提高企业的经济效益。因此,怎样使得机械设备的调度更加合理,成为了我国科研人员研究的重点。原有的自动化控制模型存在通信性能较弱、调度稳定性不好的问题,造成自动化控制设备在工作中常常出现控制偏差,导致机械设备加工错误。通过数学计算使原有的自动化控制模型能够自动获取最为合理的调度时间,改善原有模型中的通信性能、调度稳定性能。
1 确定自动化控制模型影响变量
大型机械中常用的自动化控制设备(系统)由一个自动化控制母设备和多个自动化控制子设备构成,自动化控制设备(系统)实质是一群控制设备的组合。在大型机械设备的自动化控制系统中,常常使用集合P来表示自动化控制设备集合,P={P0,P1,…,Pi,…,PN},表示该自动化系统中含有N个自动化控制设备。i是一个正整数,并且1≤i≤N,P0表示自动化控制设备中的母设备,其余均为自动化控制设备的子设备[1]。大型机械设备的自动化控制设备中,母设备能够对子设备进行控制,将其自动化控制通道长度用L表示。大型机械设备的自动化控制设备控制示意图如图1所示。

图1 自动化控制设备控制示意图
由图1可知,大型机械设备的自动化控制任务主要由P0自动化控制母设备完成,母设备中存储大量控制任务。由于每条自动化控制通道长度均不相同,导致每个子设备从接受到母设备命令到动作时的工作效率也不同,因此会造成自动化控制系统通信性能较弱、调度稳定性不好,从而形成“大面积、分散式”的低效率工作模式。同时,由于各个子设备的自动化控制效率的不同,使得N个子设备无法同时接受控制任务,无法同时动作[2]。
因此,想要改变自动化控制设备的工作现状,要引用数学计算,通过数学计算使原有的自动化控制模型能够自动获取最为合理的调度时间,改善原有模型中的通信性能、调度稳定性能。即通过“并行分布”原则,依托数学计算,完成基于数学计算的自动化控制模型设计。基于数学计算的自动化控制模型能够使得大型机械设备受到高效、精准的自动化控制。
2 依托数学计算进行自动化控制模型设计
根据确定自动化控制模型影响变量,即造成自动化控制模型通信性能较弱、调度稳定性不好的因素,根据这些因素,引入“并行分布”原则,依托数学计算,完成基于数学计算的自动化控制模型设计,从而实现对机械设备进行合理调度,使其能够有序进行机械加工[3]。
假设大型机械设备中自动化控制设备的母设备已经获取到自动化控制任务,其任务调度顺序为A1,A2,…,An,(n为正整数,是自动化控制任务的数量)。根据上述的自动化控制任务调度顺序,使PA1,PA2,…,PAn这些子设备分别动作,并记录这些子设备从接受到母设备命令到动作时所用的时间,TA1,TA2,…,TAn表示各个子设备的用时。为了增强自动化控制模型的通信性能,同时确保自动化控制模型的调度稳定性[4],通过数学计算,设定各个子设备的动作时间早于母设备开始调度工作的时间。由此设计出的基于数学计算的自动化控制模型工作流程如图2所示。

图2 合理调度任务的自动化模型工作流程图
由图2得出,所设计的基于数学计算的自动化控制模型将大型机械设备自动化控制任务通过自动化控制通道进行分配,使得控制总任务量D,经由母设备依照调度顺序A1,A2,…,An依次分配到各个子设备中,总任务量D与任务调度顺序A的关系如式(1)所示:

式中,Ai代表A1,A2,…,An。实现基于数学计算的自动化控制模型设计的最后步骤是获取合理的调度时间Tn,此时大型机械设备中自动化控制设备的N个子设备都完成了控制任务[5]。
3 完成自动控制模型的设计
完成基于数学计算的自动化控制模型设计之后,还有对其进行校对。完成控制任务的子设备还需进行控制任务量校对,对基于数学计算的自动化控制模型所分配的调度任务进行合理性检查。只有通过合理性检查,才能确保母设备的调度任务能够调度子设备进入正常控制状态[6]。为了确保校核的合理性,引入“适应度”,适应度是指大型机械设备中自动化控制设备完成控制工作的能力,适应度的公式如下:

式中,T代表大型机械设备中自动化控制设备完成控制任务所用的总调度时间,dai表示子设备的调度时间,适应度f(t)数值与自动化控制设备完成控制工作的能力成反比例关系,适应度f(t)数值越小,自动化控制设备的控制能力就越强。
通常,如果大型机械设备所需的自动化控制任务较多,那么每个控制子设备的适应度相差并不多。因此,在基于数学计算的自动化控制模型进行校对过程中,如果出现某个控制子设备与其他控制子设备有较大差异的适应度,那么,则证明该自动控制子设备无法完成其自身的自动化控制任务[7]。此时,自动化控制母设备应重新为出现问题的自动化控制子设备分配控制任务,然后再次计算其适应度,反复循环,直至该自动化控制子设备的适应度在合理范围内。
经由式(2)对自动化控制子设备的适应度进行计算后,然后通过计算式(3),能够获取调度时间Tn,式(3)如下所示:

式中,Tai表示子设备从接受到母设备命令到动作时所用的时间,wai表示母设备开始动作时间,通过计算,完成基于数学计算的自动化控制模型的校对,确定所设计的模型具有可行性[8]。
4 仿真试验
为了保证本文提出的基于数学计算的自动化控制模型设计的有效性,进行仿真试验分析。试验过程中,以典型自动化控制模型作为仿真试验对象,对自动化控制模型的通信性能、调度稳定性进行仿真模拟。
4.1 试验准备
由于设置的原始数据不同,得到自动化控制模型的通信性能、调度稳定性也是不同的,并且对试验结果造成影响。因此,试验过程中需要保证原始数据是一致的。使用2台型号、规格相同的虚拟实验设备,在虚拟实验设备中分别写入正常自动化控制模型以及基于数学计算的自动化控制模型,然后对同一大型机械设备依次进行控制,完成调度任务。仿真试验前,将虚拟实验设备的两个通信接口分别设置带宽范围,带宽范围分别设为[0Mb/s,2.5Mb/s]和[2.5Mb/s,5Mb/s]。最后进行8h的仿真试验,从而获取模型通信性能、调度稳定性试验结果。
4.2 试验结果分析
在大型机械设备的自动化控制设备(系统)中,基于数学计算的自动化控制模型,其通信性能较强,传输速率更快,并且不容易受到网络的影响,增强了大型机械设备应用性能。在仿真试验过程中,每隔0.5h变换一次网络入侵类型,同时每隔10min记录下2台虚拟实验设备的通信接口传输速率,将获得的实验数据绘制成如图3、图4所示的曲线图。
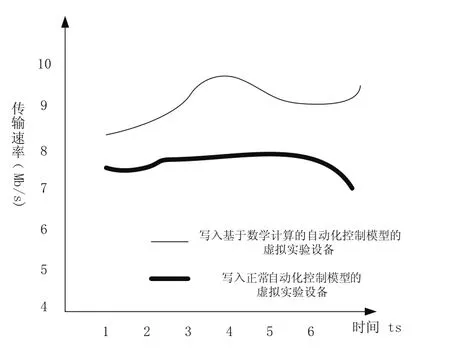
图3 网络入侵下2台虚拟实验设备传输速率对比曲线图(通信接口1)

图4 网络入侵下2台虚拟实验设备传输速率对比曲线图(通信接口2)
由图3、图4可得,在2台虚拟实验设备的两个通信接口中,基于数学计算的自动化控制模型使得2号虚拟实验设备的传输速率高于1号虚拟实验设备。并且,网络入侵的类型对其传输速率几乎无影响,表明基于数学计算的自动化控制模型通信性能更强。
在仿真试验中,每隔0.5h对三个系统在2台虚拟实验设备的调度任务量进行采集,并制成如图5、图6所示曲线图。

图5 2台虚拟实验设备的调度任务量对比曲线图(通信接口1)

图6 2台虚拟实验设备的调度任务量对比曲线图(通信接口2)
由图5、图6可得,在通信接口1中,2台虚拟实验设备的调度任务量波动均不明显,基于数学计算的自动化控制模型的虚拟试验设备调度任务量几乎为直线状态。在通信接口2中,常规虚拟试验设备调度任务量波动情况明显变大,并且存在严重的下降情况。而基于数学计算的自动化控制模型的虚拟试验设备调度任务量仅仅存在细微波动,该试验表明基于数学计算的自动化控制模型的调度稳定性较好。
5 结论
自动化控制设备对机械设备进行合理调度,使其能够有序进行机械加工。除此之外,自动化控制设备还能增强机械设备的应用性能,提高企业的经济效益。本文通过确定造成自动化控制模型通信性能较弱、调度稳定性不好的因素,来设计基于数学计算的自动化控制模型,然后对所设计的模型进行校核,最终完成基于数学计算的自动化控制模型的设计。试验结果表明,基于数学计算的自动化控制模型具有通信性能强、调度稳定性好优点,能够大大减少机械设备因自动化控制设备出现偏差造成的加工失误次数。
