基于CC-Link总线的ABB机器人控制方法研究
2019-01-19
(上海电子信息职业技术学院,上海 201411)
0 引言
随着中国工业的迅猛发展,对工业机器人的需求也日益增加。特别是近年来,随着产业升级,机器越来越多的代替人工。ABB作为世界四大机器人之一,自1994年进入中国以来,得到了迅猛的发展,在汽车、铸造、塑料、金属加工及3C等行业应用广泛。近年来,中小企业中机器人也得到了越来越多的应用。
现代工业控制领域,网络化是一个必然趋势,现场总线应用越来越多,例如Profi-bus、CAN、CC-Link等总线都得到了广泛的应用。如何在ABB机器人与三菱小型PLC之间建立一种可靠的、低成本的网络通信是值得研究的一个问题。本文以ABB机器人和三菱FX3U系列PLC为例,介绍一种在两者之间建立基于CC-Link网络通信的方法,实现机器人的远程控制。
1 CC-Link网络
CC-Link(控制与通信链路系统)是三菱电机推出的开放式现场总线,是一个以设备层为主的网络。具有数据容量大,通信速度多级可选择的有点,同时也可覆盖较高层次的控制层和较低层次的传感层。一般情况下,CC-Link整个一层网络可由1个主站和64个从站组成。网络中的主站由PLC担当,从站可以是远程I/O模块 、特殊功能模块 、带有CPU和PLC本地站、人机界面、变频器及各种测量仪表 、阀门等现场仪表设备。

图1 CC-Link网络系统图
图1是一个典型的CC-Link网络系统,由1个Ver.1版本的远程设备站和1个Ver.2版本的远程设备站组成。
2 系统配置
三菱PLC与ABB机器人CC-Link系统配置如图2所示,具体设备如表1所示。
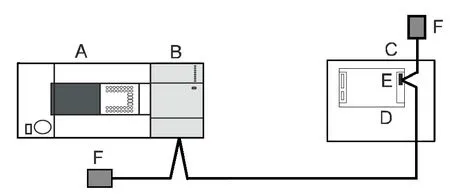
图2 系统配置图

表1 系统配置表
1)网络硬件及连接
这是一个1个主站和1个从站构成的CC-Link网络,FX3U-16CCL-M作为主站,DSQC378模块作为从站。
DSQC378是ABB机器人的一个通信模块,它为CC-Link网络和ABB机器人上使用的DeviceNet总线提供了一个接口,实现CC-Link和DeviceNet之间信号的转换。这个设备可作为CC-Link网络中的智能设备站。DSQC378如图3所示,X3为电源接口,X5为DeviceNet接口,用于设定DeviceNet总线地址和在信号线连接,端口说明如表2所示,1-5端口用于电源和信号传输,6-12端口用于DeviceNet地址设置。X8为CC-Link接口。

图3 DSQC378

表2 X5端子说明
作为主站的FX3U-16CCL-M与ABB机器人从站的DSQC378模块接线图如图4所示。

图4 CC-Link连线
2)CC-Link主站设置
CC-Link主站FX3U-16CCL-M模块开关类设定如图所示,主要设定站号为0(主站),传输速率模式设定为2(2.5Mbps)。

图5 FX3U-16CCL-M模块开关设定
使用GX Works2进行网络参数设置如图6、图7所示。

图6 网络参数设置
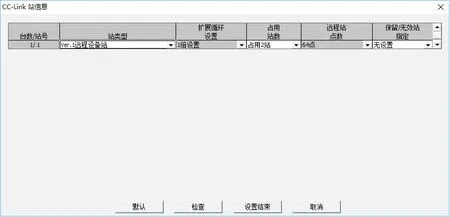
图7 从站信息设置
3)CC-Link从站设置
(1)DeviceNet设定
根据DSQC378模块X5接口6-12端子的连接情况确定的地址(例如地址为10),在机器人系统中,使用模板设置DSQC378在DeviceNet总线上的参数。完成如图8所示,板卡名称(Name)可不修改,默认为D378B,只需修改地址,DSQC即可作为DeviceNet总线的一站,与机器人系统进行通信。

图8 DSQC378的DeviceNet设定
(2)CC-Link参数设置
需要设置的参数如表3所示,包括:StationNo(站号)、BaudRate(传输速率)、OccStat(占用的站数)、BasicIO(IO类型)、Reset(复位)。
DSQC378的CC-Link参数是在完成其DeviceNet设定基础上进行的,可在机器人DeviceNet Command菜单下添加表4的5个参数,StationNo的设定如图所示,其余设置方法相同,本次设定的参数值如表。
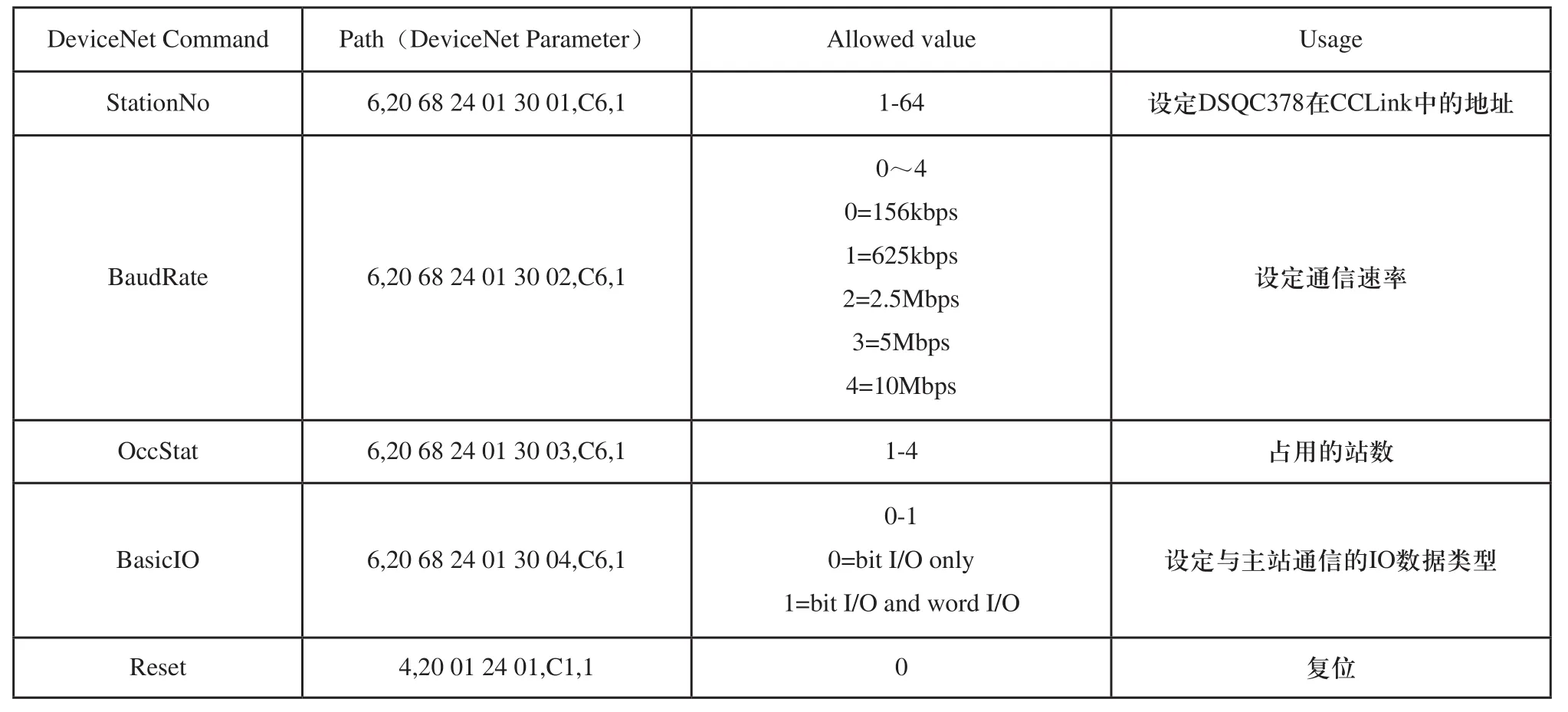
表3 CC-Link参数

图9 参数设置
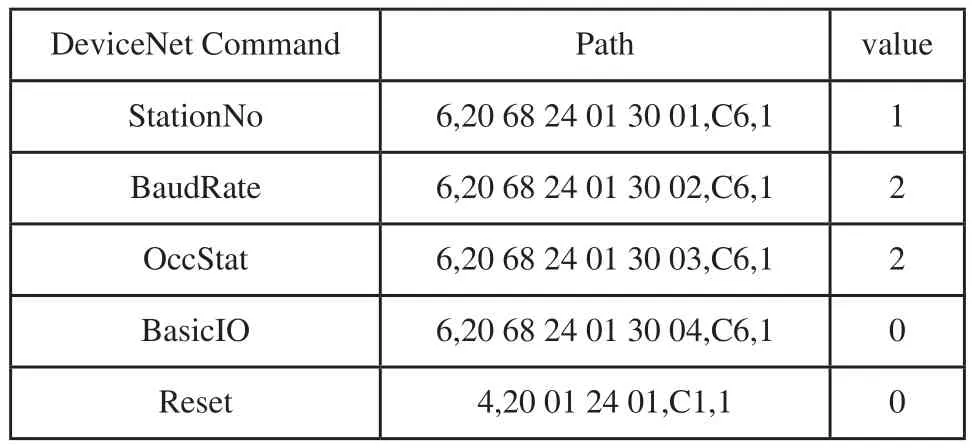
表4 CC-Link设定值
DSQC378在CC-Link网络中输入/输出数据的设定数量是由 “Occstat”和“BasicIO”两个参数决定的,在设置时可参考表5设置2个参数的值。

表5 IO数据量
3 通信数据规划
完成CC-Link参数设定后,需要进行数据通信的规划,PLC、主站缓冲存储区、DSQC输入输出之间的数据关系如图10所示。PLC和DSQC378之间可进行48bit和2word的信息交换。

图10 PLC与机器人数据交换
1)PLC读取、发送数据方法
通过From指令PLC可读取机器人的发来的数据,通过To指令发送数据给机器人。

图11 PLC读取、发送程序图1
例如,PLC的X0端接了一个按钮,是机器人电机上电信号,通过下面指令将X0这个信号转换为M800信号,然后通过上面的To指令就发送到了机器人DSQC的DI1位置。

图12 PLC读取、发送程序图2
2)机器人读取、发送数据方法
在机器人系统中建立需要的数字输入/输出信号,然后将每个信号与DSQC378上的信号一一做关联,关联完成,机器人即可使用这些信号。其设置方法如表6所示,定义了一个Mort_on信号,这个信号被分配在DSQC378的第一个网络输入端口上,至此,当PLC的X0按钮按下,Mort_on这个信号就发生变化,机器人中就可以使用Mort_on这个信号了。

表6 DSQC378上数字信号设置方法
4 结论
ABB机器人通过安装DSQC378B CC-Link Adapter通信模块,可以轻松的与主站CC-Link模块进行字和位信息的交互。与通过硬件IO交流相比,省配线,省工时,好维护。并且在进行字信息交流时,只能选择CC-Link通信模块。
