两类平面并联机构凯恩动力学建模与比较研究
2019-01-14宋轶民金雪莹
宋轶民,金雪莹,梁 栋,孙 涛
两类平面并联机构凯恩动力学建模与比较研究
宋轶民1,金雪莹1,梁 栋2,孙 涛1
(1. 天津大学机构理论与装备设计教育部重点实验室,天津 300354;2. 天津工业大学机械工程学院,天津 300387)
研究了冗余驱动平面4-RR并联机构与非冗余驱动平面3-RR并联机构的刚体动力学建模及其性能比较.首先,从运动学角度出发,推导了两种机构的运动学逆解模型. 其次,基于Kane方程和多体理论,提出了一种模块化建模方法. 该方法简捷、高效,可有效简化动力学建模过程,并可获得结构紧凑的系统动力学模型,对于控制策略的构建极为便利. 最后,在MATLAB编程环境下,分别从运动学与动力学性能指标、逆刚体动力学仿真等方面对两种机构进行了比较分析,验证了冗余驱动在规避奇异、提升系统动态性能等方面的有效性,为后续基于模型的控制策略设计奠定了理论基础.
并联机构;Kane方程;冗余驱动;动力学
近年来,少自由度并联机构已在许多领域得到较为广泛的应用,原因是其具有刚度高、结构紧凑、承载能力强、动态性能好、控制便捷等优点[1].但是,并联机构较小的工作空间和工作空间内较多的奇异点是制约其性能的关键因素[2-3].因此,如何有效规避工作空间内的奇异点,扩大无奇异工作空间,使其运动性能得以充分发挥,值得去做一些深入研究.
动力学模型是动态特性分析和控制的基础.常用的动力学建模方法包括牛顿-欧拉(Newton-Euler) 法[4]、拉格朗日(Lagrange)法[5]、凯恩(Kane)法[6-7]、虚功原理法[8]等.这几种方法建立的动力学模型表达形式各不相同,但在本质上并无差别.Newton-Euler法物理意义明确,但因涉及铰链内力计算,导出的计算格式不宜作为控制的模型.Lagrange法在串联机构的动力学建模中应用较广,其特点是无需计算系统铰链内力(力矩),可得到形式较为简捷的动力学方程.但是,Lagrange法是基于分析力学,需做较多偏导运算,一定程度上会增大建模工作量.Kane法兼具矢量力学与分析力学的特点,其将广义速率定义为运动学变量,采用偏速度与偏角速度建立系统的自由度空间(可运动方向的空间),将力投影在偏速度与偏角速度的空间上,不会出现理想的约束反力,有利于计算机的辅助运算.Bhattacharya等[9]基于Lagrange方程分别建立并联机构各支链与动平台的动力学模型,而后将其组合,并借助运动学映射关系进行坐标变换,得到了系统的动力学模型.Zubizarreta等[10]利用上述方法对传感器冗余的平面并联机构进行了动力学建模.Cheng等[6]应用Kane方程建立了3SPS+1PS并联机构的动力学模型并进行了仿真分析. Kane方法在建立系统的动力学模型时,具有简捷、高效的优点且有利于基于模型的控制策略的构建.然而,目前有关该方法在冗余驱动并联机构动力学建模中的应用则少有报道.
平面并联机构虽然结构简单,成本低廉,但应用广泛,其中平面3-RR并联机构[11]是最具代表性的构型之一,其可应用于电子封装、精密定位等[12]先进制造领域.而在此基础上衍生出的平面4-RR并联机构[13]由于增加了一条对称冗余驱动支链,其可有效克服传统平面3-RR并联机构的第二类奇异,改善运动性能,因此日益受到重视.本文拟研究上述两类机构的高效动力学建模问题及其动态性能比较.首先,建立两类机构的运动学逆解模型;其次,基于Kane方程和多体理论,提出一种模块化建模方法,并据此建立上述两类机构的刚体动力学模型;最后,对上述机构进行运动学与刚体动力学性能的分析与对比,并借助多体软件验证所提方法和结论的正 确性.
1 运动学分析
1.1 位置逆解分析


图1 两类平面并联机构示意


(1)

(2)
根据机构的几何约束关系可得


(3)


(4)
其中






式中和分别为冗余驱动平面4-RR并联机构动、静平台中心点到其铰链中心点的距离.

与冗余驱动平面4-RR并联机构的运动学逆解推导过程相仿,非冗余驱动平面3-RR并联机构的位置逆解可表示为

(5)
1.2 速度逆解分析
对式(2)关于时间求1阶导数,整理后可得

(6)
对式(3)关于时间求1阶导数,经整理,可得

(7)


(8)
履行相仿手续,可求得非冗余驱动平面3-RR并联机构的雅可比矩阵为

(9)

篇幅所限,、中各元素具体表达式不再列出.
2 动力学建模
2.1 Kane方程
Kane方程被描述为对应于每一个广义速率的广义主动力与广义惯性力之和为零,即有

(10)
2.2 系统动力学方程
动力学模型对于并联机构的动态性能分析和控制器设计具有重要意义.为提高效率,提出一种模块化建模方法,将机构虚拟切割为支链子模块和动平台子模块,选取主动关节输入向量、被动关节向量和末端执行器参考点输出向量为系统广义坐标,进而基于Kane方程,建立各子模块的动力学模型,在此基础上,借助增广拉格朗日乘子法[14],构建系统的完备动力学模型.建模流程如图2所示.针对冗余驱动并联机构,应用该方法建立的系统动力学模型中含有被动关节的冗余信息,同时结合冗余驱动,可有效避免因坐标奇异带来的动力学模型失效问题.

图2 动力学建模流程
以冗余驱动平面4-RR机构为例,阐述建模过程.首先在支链末端关节位置处进行虚切,获得开链系统,如图3所示.对于支链建模,不失一般性,以任意支链为例进行分析.

图3 机构任意分支示意
依据上述建模思想,定义系统广义坐标向量为
令惯性坐标系下、、轴的单位方向向量分别为、、,则支链中两杆件的角速度为
支链中杆件的质心位置矢量可表示为
对之关于时间求导,得到支链中两杆件的质心速度为
(11)
由式(11)可得支链中各杆件的质心偏速度为

(12)
此外,各杆件的偏角速度为

(13)
进一步对质心位置方程关于时间求2阶导数,得到杆件的质心加速度为

(14)
因此,作用于支链中各杆件的广义惯性力为
(15)

依据Kane方程,开链系统中任意支链的动力学方程可写为
上式可表示为如下紧凑形式:

(16)
动平台为独立运动刚体,其动力学方程可表示为

(17)
将支链动力学方程式(16)与动平台动力学方程式(17)进行组集,可得开链系统的动力学方程为

(18)
根据机构运动学关系,机构的闭链约束方程可表示为如下矩阵形式:

(19)
对式(19)关于时间求1阶导数,可得系统的速度约束方程为

(20)


(21)
进一步对闭链约束方程式(19)关于时间求导后,写为如下形式:

(22)
将式(22)代入式(20),可得

(23)

(24)
基于式(24)所示关系,可消掉上式中的广义约束力项,得到简化形式的系统动力学方程为

(25)

上式可简记为

(26)
对于冗余驱动平面4-RR并联机构,因其驱动力矩数目大于系统动力学方程数目,需进行优化求解,为便于实际控制,借助最小二范数法[3],可将该机构的逆动力学解表示为

(27)
对于非冗余驱动平面3-RR并联机构,效仿上述冗余驱动平面4-RR并联机构的动力学推导过程,可建立其动力学模型为

(28)
因非冗余驱动平面3-RR并联机构驱动力矩数等于系统动力学方程数,故其逆动力学具有唯一解

(29)
3 动态性能比较研究
3.1 运动学性能

给出两类机构的尺寸和质量参数如表1[11]所示.为便于比较分析,设定两类机构支链中各杆件的尺度参数一致,动、静平台相应尺寸亦一致.
表1 机构的尺度和质量参数

Tab.1 Dimensions and mass parameters of mechanism

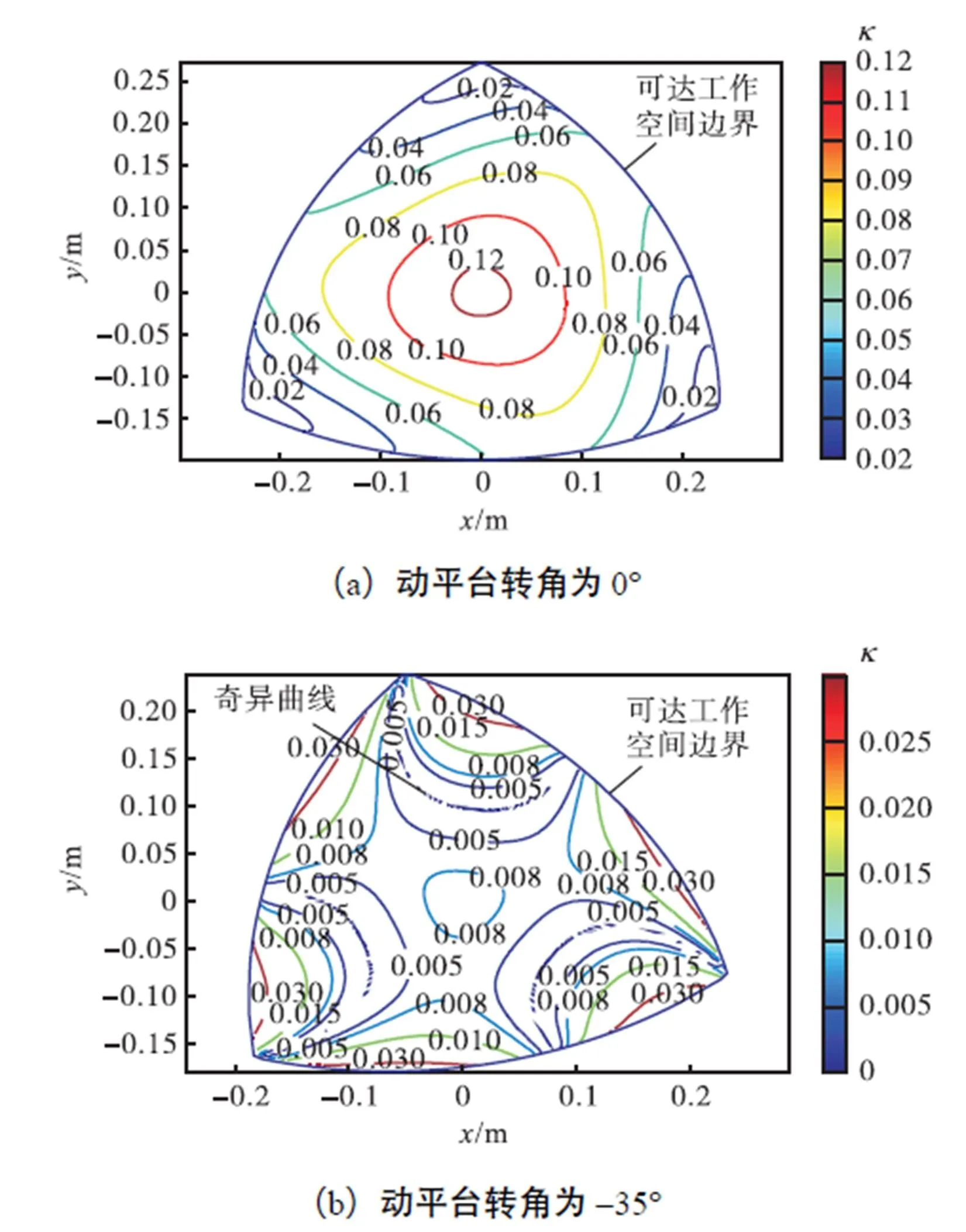
图4 3-RRR并联机构运动学性能图谱

图5 4-RRR并联机构运动学性能图谱
3.2 动力学性能
动力学性能是评价机构高速性能和加减速特性的重要技术指标.广义惯性椭球(GIE[18])和动态可操作性椭球(DME[19])可用来评价机器人的局部动力学映射特征.在此,以DME为理论依据,基于前面所建立的刚体动力学模型,进一步考察两类并联机构的动力学性能.考虑到加减速时,与加速度有关项将起主导作用,定义系统惯性矩阵的条件数倒数(动态灵巧度)为评价系统动力学性能的局部指标.
动态灵巧度指标定义为

图6 3-RRR并联机构动力学性能图谱

图7 4-RRR并联机构动力学性能图谱
3.3 逆刚体动力学仿真

图8 3-RRR并联机构驱动力矩

图9 4-RRR并联机构驱动力矩

3.4 多体软件验证

图10 多体软件仿真模型

图11 不同时刻构型图
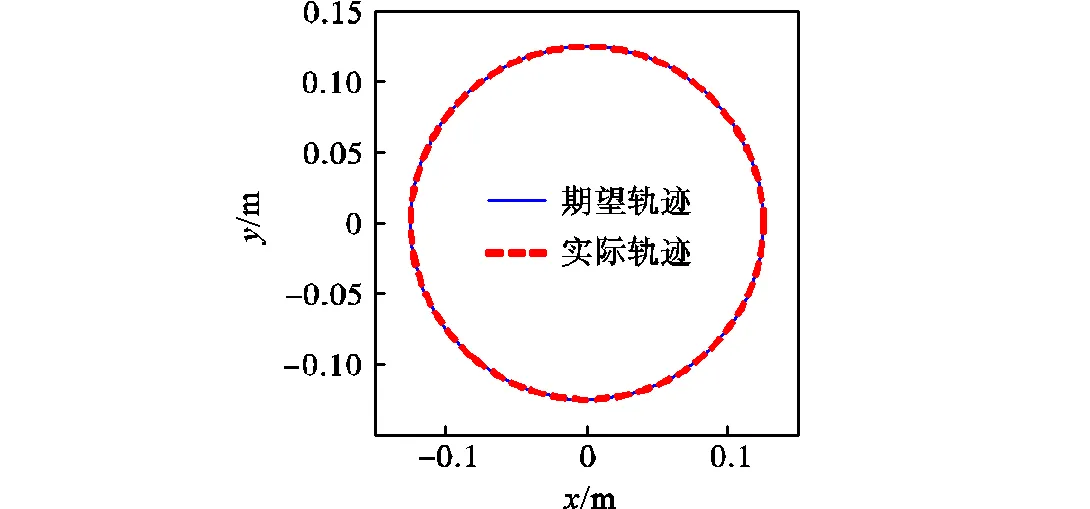
图12 末端执行器跟踪轨迹
4 结 论
(1) 在对机构进行运动学分析的基础上,借助Kane方程和多体理论,提出了一种高效的模块化建模方法,该方法可有效应对含复杂闭链约束机构的动力学建模问题,降低建模复杂度.
(2) 将包含广义约束力的系统动力学模型向约束雅克比矩阵的零空间方向投影,消掉了广义约束力项,所得模型结构紧凑、形式简捷,对于提高未来动力学控制策略的设计和执行效率具有重要意义.
(3) 基于运动学与动力学灵巧度指标全面比较研究了两类机构的性能,在此基础上,针对不同运动轨迹开展了逆刚体动力学仿真,直观揭示了冗余驱动在克服系统奇异和提升动态性能方面的有效性.
(4) 开发了冗余驱动并联机构的多体物理仿真模型,并基于一种动力学前馈方法实施仿真,验证了理论模型的正确性和有效性.
[1] Huang T,Li Z X,Li M. Conceptual design and dimensional synthesis of a novel 2-DOF translational parallel robot for pick-and-place operations[J]. ASME Journal of Mechanical Design,2004,126(3):449-455.
[2] Wu J,Wang J S,Li T M,et al. Performance analysis and application of a redundantly actuated parallel manipulator for milling[J]. Journal of Intelligent and Robotic Systems,2007,50(2):163-180.
[3] Liang D,Song Y,Sun T,et al. Optimum design of a novel redundantly actuated parallel manipulator with multiple actuation modes for high kinematic and dynamic performance[J]. Nonlinear Dynamics,2016,83(1/2):631-658.
[4] 李永刚,宋轶民,冯志友,等. 基于牛顿欧拉法的3-RPS并联机构逆动力学分析[J]. 航空学报,2007,28(5):1210-1215.
Li Yonggang,Song Yimin,Feng Zhiyou,et al. Inverse dynamics of 3-RPS parallel mechanism by Newton-Euler formulation[J]. Acta Aeronautica et Astronautica Sinica,2007,28(5):1210-1215(in Chinese).
[5] Jain A,Rodriguez G. Diagonalized Lagrangian robot dynamics[J]. IEEE Transactions on Robotics and Automation,1995,11(4):571-584.
[6] Cheng G,Shan X. Dynamics analysis of a parallel hip joint simulator with four degree of freedoms(3R1T)[J]. Nonlinear Dynamics,2012,70(4):2475-2486.
[7] 赵海峰,蹇开林. 基于KANE方法的并联六自由度机构的动力学计算[J]. 计算力学学报,2011,28(增1):165-169.
Zhao Haifeng,Jian Kailin. Dynamic computation of the 6-DOF parallel mechanism based on kane method[J]. Chinese Journal of Computational Mechanics,2011,28(Suppl 1):165-169(in Chinese).
[8] 张利敏,梅江平,赵学满,等. Delta机械手动力尺度综合[J]. 机械工程学报,2010,46(3):1-7.
Zhang Limin,Mei Jiangping,Zhao Xueman,et al. Dynamic dimensional synthesis of Delta robot[J]. Journal of Mechanical Engineering,2010,46(3):1-7(in Chinese).
[9] Bhattacharya S,Hatwal H,Ghosh A. An on-line parameter estimation scheme for generalized Stewart platform type parallel manipulators[J]. Mechanism and Machine Theory,1997,32(1):79-89.
[10] Zubizarreta A,Cabanes I,Marcos M,et al. Dynamic modeling of planar parallel robots considering passive joint sensor data[J]. Robotica,2010,28(5):649-661.
[11] Zhang Xuchong,Zhang Xianmin,Chen Zhong. Dynamic analysis of a 3-RRR parallel mechanism with multiple clearance joints[J]. Mechanism and Machine Theory,2014,78:105-115.
[12] 高名旺,张宪民,刘 晗. 3-RRR高速并联机器人运动学设计与实验[J]. 机器人,2013,36(6):716-722.
Gao Mingwang,Zhang Xianmin,Liu Han. Experiment and kinematic design of 3-RRR parallel robot with high speed[J]. Robot,2013,36(6):716-722(in Chinese).
[13] Wu J,Wang L,You Z. A new method for optimum design of parallel manipulator based on kinematics and dynamics[J]. Nonlinear Dynamics,2010,61(4):717-727.
[14] Sun T,Liang D,Song Yimin. Singular-perturbation-based nonlinear hybrid control of redundant parallel robot[J]. IEEE Transactions on Industrial Electronics,2018,65(4):3326-3336.
[15] Huang T,Li M,Li Z,et al. Optimal kinematic design of 2-DOF parallel manipulators with well-shaped workspace bounded by a specified conditioning index[J]. IEEE Transactions on Robotics and Automation,2004,20(3):538-543.
[16] Gosselin C,Angeles J. Singularity analysis of closed-loop kinematic chains[J]. IEEE Transactions on Robotics and Automation,1990,6(3):281-290.
[17] Gosselin C,Angeles J. A global performance index for the kinematic optimization of robotic manipulators[J]. Journal of Mechanical Design,1991,113(3):220-226.
[18] Asada H. A geometrical representation of manipulator dynamics and its application to arm design[J]. Journal of Dynamic Systems,Measurement,and Control,1983,105(3):131-142.
[19] Yoshikawa T. Dynamic manipulability of robot manipulators[J]. Transactions of the Society of Instrument and Control Engineers,1985,21(9):970-975.
(责任编辑:金顺爱)
Kane-Formulation-Based Dynamic Modeling and Comparative Study on Dynamic Performance of Two Kinds of Parallel Robots
Song Yimin1,Jin Xueying1,Liang Dong2,Sun Tao1
(1. Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education, Tianjin University,Tianjin 300354,China; 2. School of Mechanical Engineering,Tianjin Polytechnic University,Tianjin 300387,China)
In this study,we compared the rigid body dynamics of 4-RR and 3-RR parallel robots. First,we derived inverse kinematics models for both parallel robots. Second,based on the Kane formulation and multibody theory,we developed a modular modeling method,which is concise and efficient to simplify the dynamic modeling process effectively. Using this method,a dynamic system model with a compact format can be achieved,which is very suitable for the construction of a control strategy. Ultimately,using MATLAB software,we performed inverse dynamic simulations and comparatively analyzed the two parallel robots with respect to their kinematic and dynamic performance indices. The results suggest that a redundantly actuated parallel robot can effectively avoid singularities and enhance the dynamic performance of a system compared to one that is non-redundantly actuated. These findings lay a theoretical foundation for the future design of model-based control strategies.
parallel mechanism;Kane formulation;redundant actuation;dynamics
10.11784/tdxbz201805028
TH112.1
A
0493-2137(2019)02-0173-10
2018-05-15;
2018-07-05.
宋轶民(1971— ),男,博士,教授.
宋轶民,ymsong@tju.edu.cn.
国家自然科学基金资助项目(51475321).
the National Natural Science Foundation of China(No. 51475321).
