火箭弹载捷联惯导在线标定中旋转运动方案设计*
2019-01-14王海亮李国璋石志勇王志伟
王海亮,李国璋,石志勇,王志伟
(1.陆军工程大学石家庄校区,石家庄 050003;2.解放军96864部队,河南 洛阳 471000)
0 引言
火箭炮作为一种威力大、火力猛、机动性强的高性能武器系统,其发展受到各国广泛关注。作为一种压制性武器,火箭弹自身并没有精确制导能力,为了提高杀伤力,一些国家对其进行了制导化改造。但由于成本限制,改造中使用的都是一些低成本、低精度的惯性元件。因此,为了确保火箭弹射击精度,在射击前对其进行标定是十分必要的。射前标定是指火箭炮在进入阵地临发射之前,利用火箭炮摇架的运动等信息,对火箭弹载惯导系统的误差参数进行标定的过程,射前标定的精度直接决定着火箭炮的打击精度。但是,一方面火箭炮的攻击特点要求在短时间内必须完成大批量发射,因此,误差标定的效率必须保证,否则无法做到在每批次射击前都进行误差标定。另一方面,火箭炮在完成一次射击后如果不需要转移阵地,那么在下一次射前准备阶段系统就只有两自由度的角运动(俯仰角、偏航角),导致不能有效激励出所有的误差参数,系统可观测性不强,从而影响导航精度。
为解决上述问题,很多学者进行了大量的研究,也都取得了丰硕的成果。Levinson等人在研究惯性器件长时间导航中精度降低问题时,首先提出了旋转调制技术[1-5]。火箭军工程大学的杨建业等人通过对单轴旋转系统的导航方程及误差方程进行推导,得出单轴旋转可以调制由惯性器件零偏和常值漂移所造成的导航误差,从而提高导航精度[6]。文献[7]提出导航系统经过旋转,能够对惯性器件的常值漂移和零偏进行有效调制,从而达到补偿误差,提高导航精度的目的。文献[8]基于惯导系统通过改变姿态或者进行有效旋转可以提高导航参数可观测性这一特点,提出了一种单轴旋转调制方案,将加速度计和陀螺安装在一个单轴旋转惯导系统中,该方案有效提高了加计和陀螺误差的可观测性,实现了误差参数的标定和补偿。王志伟在文献[9]中提出在火箭弹射前准备阶段加入横滚运动的标定方案,并分析得出横滚运动可使多个参数变得可观,并在文献[10]中采用提取误差直流分量的方法对弹载捷联惯导进行误差分析,从而得出各误差参数对导航精度的影响。
上述研究分别采用不同的方法验证了在捷联惯导标定过程中加入系统旋转运动能够提高可观测性以及导航精度。但都没有进行具体的量化研究,因此,无法确定弹体在标定过程中加入横滚运动的具体运动参数,导致在火箭弹射前标定阶段加入横滚运动这一研究的实际应用性不强。
本文在前人研究的基础上通过理论计算分析得出了标定过程中火箭弹横滚运动中加速转过的角度大小是影响陀螺常值漂移标定效果的主要因素,并根据计算结果设计了一组数据进行了仿真实验验证,通过实验最终确定了火箭弹标定过程中弹体的最优横滚运动方案。
1 弹体横滚运动参数最优化分析
设系统标定过程中弹体绕y轴做横滚运动,转动过程中陀螺的常值漂移在n系的投影表示为:
设惯导系统的旋转运动是匀速转动,则旋转开始阶段必然存在一个角加速的过程,假设是匀角加速运动,则上式可写成:
其中,a为转动角加速度。
弹体绕y轴做横滚运动时,只对x轴、z轴方向上的陀螺有调制作用,无法对y轴方向上的陀螺进行调制[11-13]。因此,只需研究横滚运动对x轴、z轴方向上的调制效果。由式(2)得:

计算中需要用到菲涅耳(Fresnel)积分公式:

菲涅尔积分结果的级数表达形式为:

运用上述菲涅尔积分公式可求得:

其中,θ为弹体加速转动过程中转过的角度,假设各轴上的陀螺漂移相等,即εx=εz。则由上式可得

由此可得,当系统加速转过的角度为0.2π时,系统横滚运动对陀螺常值漂移的标定效果最好。
2 弹体横滚运动最优化方案设计
由上述分析可知,在火箭弹射前标定阶段,当弹载捷联惯导系统做横滚运动加速转过0.2π角度时,由陀螺漂移引起的误差角最小,此时系统的定位精度最高。为了验证系统的标定误差只与弹体加速转过的角度有关,而与弹体旋转时的角加速度和匀速转动时的角速度无关,现将弹体模拟以下3种具有不同代表性的转动规律,如表1所示。
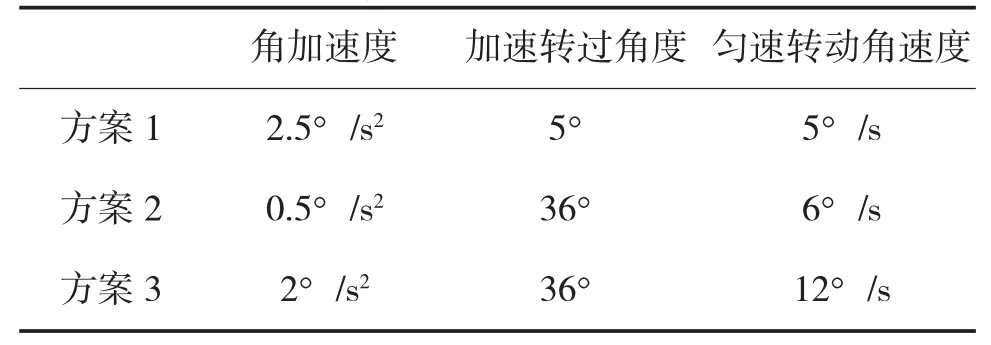
表1 弹体模拟3种方案的转动规律
设定的方案1和方案2中匀速转动阶段的角速度比较接近,但与方案3相差较大;方案2和方案3中加速转过的角度完全相同,但与方案1相差较大。目的就是通过对比得出角加速度、加速转过的角度与匀速转动时的速度这3个运动参数对标定误差的影响,由于角加速度可以通过加速转过的角度和匀速转动时的速度计算得出,因此,只需分析后两者的影响。
假设导航系统的航向运动和俯仰运动都为匀速,设定偏航角速度为π/20,俯仰角速度为π/30,总时间为180 s,水平失准角为 1′,航向失准角为30′,加速度计零偏为100 ug(1σ),陀螺常值漂移为0.001°/h。
图1~图3为3种转动情况下陀螺常值漂移的仿真结果。

图1 第1种方案陀螺(°/h)的常值漂移

图2 第2种方案陀螺(°/h)的常值漂移
通过仿真结果总结数据得下页表2、表3。
由图1~图3以及表2、表3可看出,在方案1这种旋转规律下陀螺常值漂移的收敛时间较长,而且精度很差,甚至达到了30%,而在后两种运动规律下系统的标定结果比较一致。因此,由前面设定的实验条件以及仿真结果可知,标定效果与系统加速转过的角度有直接关系,与系统达到匀速转动时的角速度关系不大。
但是,考虑到实际的导航系统工作时,转速越大系统的可靠性就会越低,为了确保弹载捷联惯导工作时系统的稳定性,系统的旋转角速度不可过大,因此,综合考虑各项指标,选取方案2作为弹载捷联惯导最优旋转运动参数,即加速转过36°,达到匀速时旋转角速度为6°/s。

图3 第3种方案陀螺(°/h)的常值漂移

表2 收敛时间

表3 收敛精度
3 结论
针对弹载捷联惯导系统标定过程中加入横滚运动的具体参数不明确这个问题,本文对误差方程进行了推导计算,并设计了对比仿真实验,最终得出以下结论:
1)陀螺常值漂移的标定效果与标定过程中弹体加速转过的角度有直接关系,与弹体匀速旋转时的角速度相关性较小。
2)结合系统的实际应用环境,当系统在标定过程中加速转过,达到匀速时旋转角速度为6°/s时,旋转惯导系统的导航效果最佳。
通过以上对系统横滚运动的最优化设计,将火箭弹载惯导在标定过程中加入的横滚运动进行了量化,提高了这项研究的实用性,对实际操作有一定的借鉴意义。
