敏捷卫星姿态机动过程分析与可视化判读平台设计
2019-01-11罗荣蒸谭志云凌琼矫轲董天舒梁健
罗荣蒸 谭志云 凌琼 矫轲 董天舒 梁健
(北京空间飞行器总体设计部,北京 100094)
姿态机动是指将卫星从一种姿态过渡到另一种要求姿态的控制过程[1]。遥感卫星可以利用高速的姿态机动能力,快速改变遥感器的对地指向,实现对地目标快速灵活的观测,这种高速的姿态机动能力可称之为姿态敏捷控制。姿态敏捷控制可极大地提高卫星使用的灵活性和观测效率,快速高效地获取所需的非星下点目标遥感数据,是当今世界遥感卫星的一个发展方向[2]。近年来,面向使用效能提升的新用户需求,促使卫星在姿态机动敏捷性、成像模式复杂性、多星协同工作等方面的性能相对以往航天器有了大幅提高。如中型敏捷平台以敏捷成像能力特别是拼幅成像、多角度成像和非沿迹成像为主要特征,能够在最大姿态角和姿态机动速度的限制范围内实施灵活的对地观测,从而实现对观测目标的快速响应和多模式成像功能[3]。测试判读是综合测试中判断航天器测试有效性与功能性能符合性的重要环节,传统的数据分析和判读方法[4-5]已不能满足敏捷卫星复杂机动过程的判读需求,须针对性地开展敏捷机动数据分析与辅助判读技术研究,从而全面有效地开展测试工作。
基于上述敏捷机动测试判读需求,本文设计了辅助判读系统并进行了整星测试验证。提出一种载荷对地工作轨迹的计算方法,能够根据航天器姿态、轨道数据计算得到载荷的对地工作轨迹、载荷对地扫描速度等衍生参数,对敏捷机动的载荷工作精确度、稳定度进行量化判读;利用STK软件提供的与Matlab软件接口模块,通过在Matlab软件处理相关数据并给STK软件发送命令控制STK的运行,从而实现视景仿真系统按照Matlab软件预先设定的程序运行。
1 姿态机动测试判读平台
传统整星测试多针对静态成像方式设计,地面注入指令设定卫星的机动角度,通过卫星姿态遥测数据判读来验证功能设计的正确性和性能指标的符合性。应用传统的测试判读方法进行敏捷机动模式测试存在如下问题:
(1)传统的数据分析方法在对卫星姿态机动能力评估时,重在对机动时间和稳定度指标上的考核,对敏捷机动成像模式中的姿态路径规划、成像条带与预期效果吻合度等系统效能指标评估不足。
(2)在航天器测试过程中进行的遥测数据静态判读和变化趋势分析,无法直接显示卫星在空间环境中的运行状况,不能直观分析复杂控制过程和故障模式状态,不利于实时数据判读与问题快速排查。
为解决上述问题,对敏捷机动模式测试的过程进行数据分析、可视化显示等判读需求进行了针对性分析,利用Matlab软件数据计算功能与STK软件仿真演示环境[6-7],设计了基于数据驱动的卫星数据判读与可视化平台(见图1)。
如图1所示,判读与可视化平台由数据源、可视化接口及演示平台组成,具体如下。
(1)数据源。数据源包括输入参数和数据来源两部分。基础参数数据源,为三维模型、轨道信息、地面站信息、设备安装矩阵等卫星基础数据;测试数据源,为测试实时或者离线数据库,包括GPS轨道数据、姿态数据、星时数据等。
(2)可视化接口模块,同时也是人机交互界面。以Matlab软件为基础工具,订阅接收实时测试数据、离线测试数据或仿真程序数据;经过数据预处理、分析算法模块等完成数据分析,计算得到载荷的对地成像工作轨迹、载荷对地扫描速度等衍生参数,并通过曲线图进行可视化数据比对与判读;经过数据接口形式匹配等流程,驱动数据在演示平台进行可视化演示。
(3)演示平台。以STK软件为基础平台,通过Connect接口模块,接收遥测数据或者处理后数据,在二维及三维场景中进行可视化演示。通过实时动态视频场景,显示卫星轨道、姿态状态及机动成像过程,客观逼真的再现航天任务执行的全过程,辅助判读测试过程。

图1 卫星数据判读与可视化平台总体架构Fig.1 Architecture of data interpretation and visualization platform
2 过程判读算法设计
针对敏捷机动复杂成像模式,提出一种载荷对地成像轨迹的计算方法,能够根据航天器姿态、轨道数据计算得到载荷的对地成像工作轨迹、载荷对地扫描速度等衍生参数,在敏捷机动模式下实现对地载荷工作精确度、稳定度进行直观量化判读。
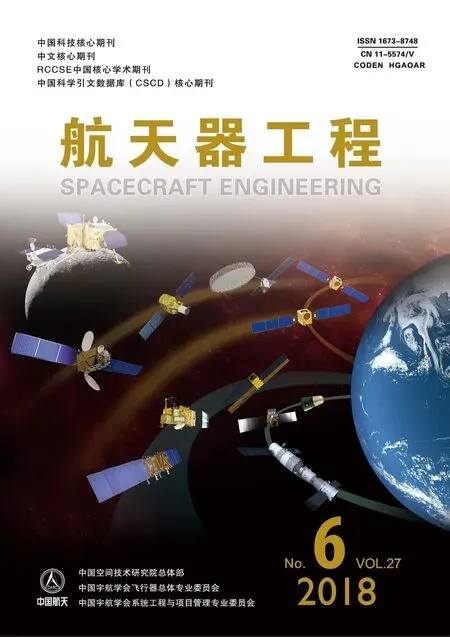
程序算法实现如图2所示,分4个步骤:数据选择与匹配、成像点求解、条带指标判读以及完整判读报告输出。在算法实现过程中,考虑到AOCC(姿态与轨道控制计算机)进行轨迹规划时使用的是GPS定位/定轨数据,所以,默认STK轨道仿真数据也可替代使用,且STK数据仿真周期可调,更易于与AOCC姿态遥测数据进行时间匹配。具体步骤如下:
(1)获取测试实时遥测和卫星基础数据。实施遥测数据包括星下点经纬度(惯性系)、姿态参数(本体系)、轨道参数(WGS84系),卫星基础数据包括相机安装矩阵等。
(2)求解惯性系下卫星坐标。通过转换矩阵,由轨道信息求解惯性系下卫星坐标。
(3)求解惯性系下主光轴方向向量。通过卫星本体坐标系与惯性坐标系转换矩阵,根据卫星坐标、卫星姿态参数、相机安装矩阵等参数,求得惯性系下主光轴方向向量。
(4)求解惯性系下成像点坐标。在惯性系下,联立主光轴方向向量与地球球面模型,求解惯性系下的成像点坐标。
(5)求解地心赤道固定坐标系下成像点坐标。通过惯性系与地固系转换矩阵,求得地固系下成像点坐标。
(6)求解大地球系下成像点坐标。通过转换矩阵,求得大地球坐标系下成像点坐标,即地理经纬度。
(7)计算成像点轨迹、移动速度等信息,并进行条带分析。
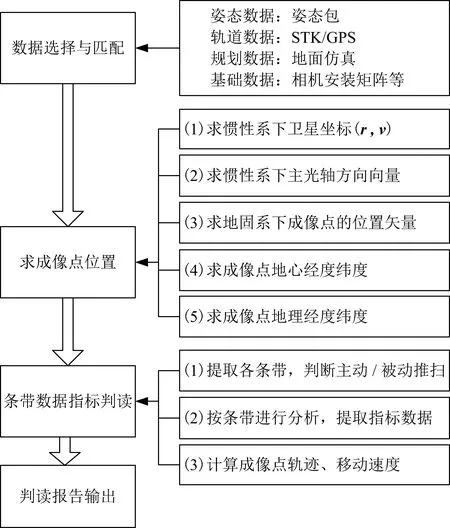
图2 敏捷机动测试数据分析算法Fig.2 Agile attitude maneuver test data analysis process
图3为卫星与成像点位置关系及相关坐标系示意图。其中,地心赤道惯性坐标系Si,简称惯性坐标系,或J2000坐标系,是一空间固定的坐标系,原点在地球的质心,xi指向J2000平均春分点,zi轴指向J2000的平均北天极点,右手定则决定yi轴。地心赤道固定坐标系Se,简称地固坐标系,随着地区旋转而旋转,原点在地球质心,ze轴指向平均北极点,又称国际参考北极点,xe轴在赤道平面内指向格林尼治子午线(本初子午线),右手定则决定ye轴。卫星轨道坐标系So,原点在卫星质心,以轨道平面内垂直于地心距矢量指向飞行前进方向为xo轴,zo轴指向地球质心,右手定则决定yo轴。卫星本体坐标系Sb,卫星质心为原点,卫星纵轴向前为xb轴,以纵对称平面内垂直于纵轴向下方向为zb轴,右手定则决定yb轴。当卫星处于正飞状态时,卫星本体坐标系与轨道坐标系重合。
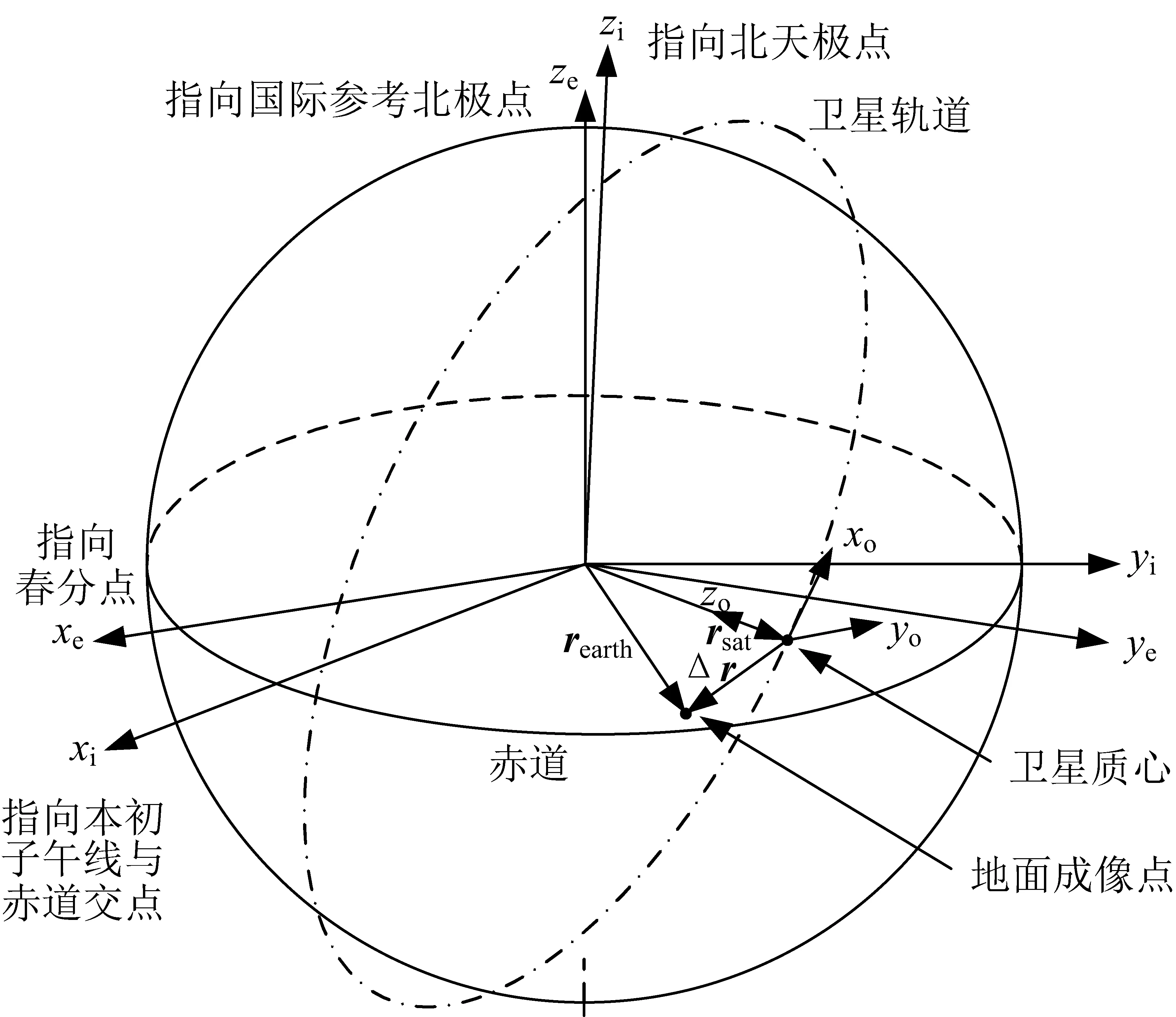
图3 卫星与成像点之间的相对几何关系Fig.3 Relative geometric relationship between satellite and imaging points
在计算成像点坐标之前,需要知道卫星与地面成像点之间的相对位置。卫星与地面成像点之间的相对位置计算方法如下。
rsat表示卫星在J2000坐标系下的位置矢量,rearth表示成像点在J2000坐标系下的位置矢量。Δr表示卫星与地面成像点之间的相对位置矢量,有如下关系
Δr=rearth-rsat
(1)
即
(2)
记地心在地固系中的位置坐标为[0 0 0]T,成像点位置矢量rearth的单位矢量在地固系中的分量为[lmn]T,得到地固系中该单位矢量过地心的空间直线方程,具体为
(3)
考虑地球扁率的地球椭球模型为
(4)
式中:Re为地球赤道半径,Rp为地球极半径。
联立单位矢量的空间直线方程与地球椭球方程得到
(5)
求解得到的[xyz]T即为成像点在地固系中的位置坐标,可利用地固系到大地坐标系的转换关系得到成像点的地理经纬度。
3 可视化演示系统设计
演示系统借助成熟的航天领域仿真软件STK作为底层演示平台,利用STK软件提供的与Matlab软件的接口模块,通过在Matlab软件处理相关数据并给STK软件发送命令控制STK软件的运行,从而让视景仿真系统按照Matlab软件程序预先的设定运行,再现航天任务执行的全过程。
3.1 卫星三维模型建立
本文利用STK软件文本建模语言,针对某遥感卫星的机构外形,对模型库中Satellite.mdl进行了改良,增加了星载天线、载荷相机及其活动关节定义,对卫星主体外形的结构布局进行了丰富,使该模型的三维效果简图与该卫星相似,卫星星载天线和太阳翼展开后外观如图4所示。
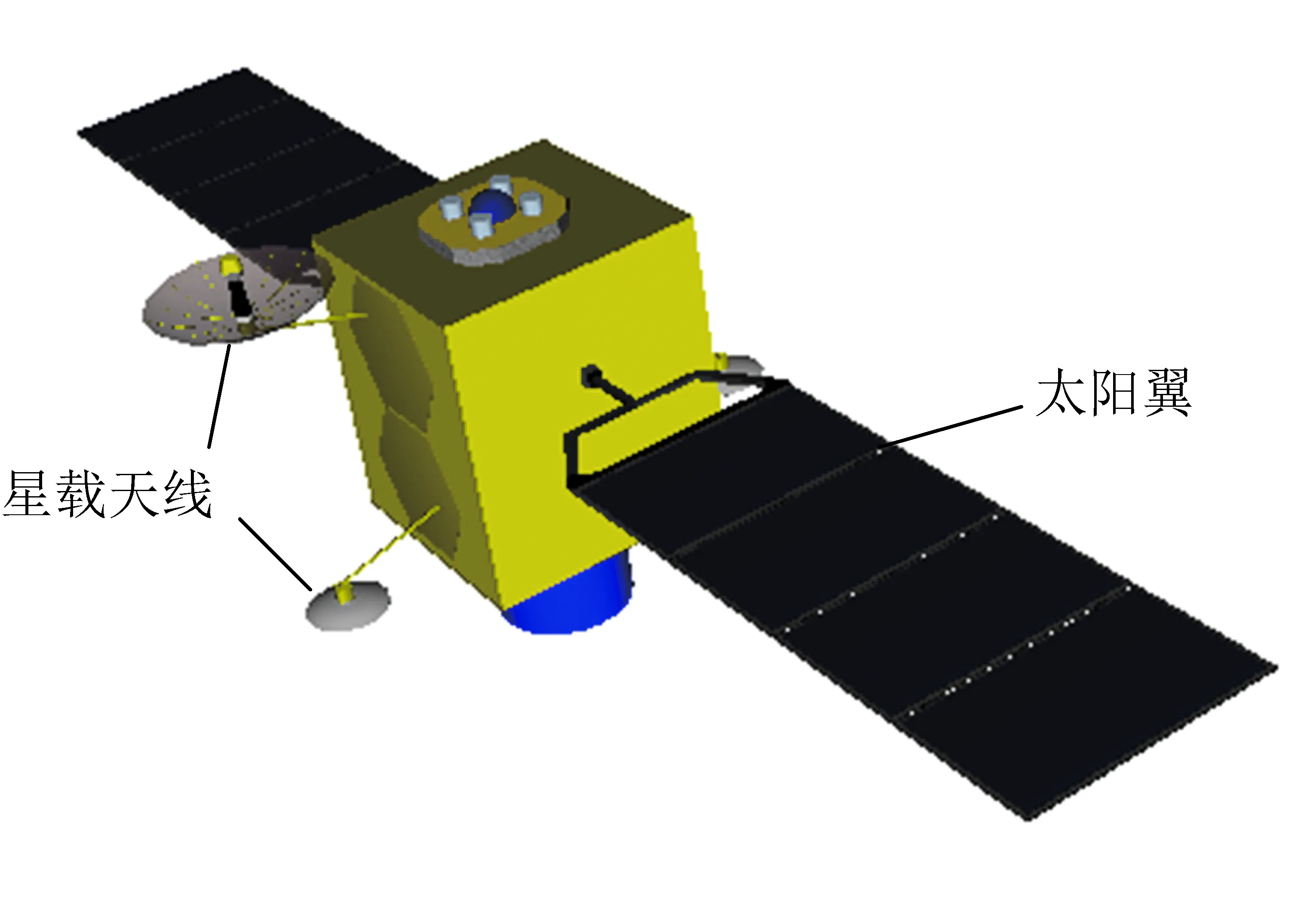
图4 卫星模型Fig.4 Satellite model
三维模型的活动关节在视景仿真中非常重要,通过定义仿真过程中活动关节的动作可以表征卫星运行过程中状态的变化。例如,改变卫星天线的指向来表征卫星服务对象的改变,改变火箭尾焰的长度来表征发动机点火或关机等。通过定义模型的活动关节可实现用测试数据驱动组件的动态变化,达到逼真显示效果。
3.2 STK与Matlab软件接口模块
STK与Matlab软件的通信主要是通过STK/Connect和STK/Matlab两个模块实现,如图5所示。其中STK/Connect模块提供了一种使用客户机/服务器端方式连接STK软件的快捷工作方式,给第三方的应用程序提供了一个向STK软件引擎发送指令和接收数据的通信路径。STK/Matlab接口则在STK和Matlab软件之间提供了一个双向的通信路径,使得在Matlab工作区通过Connect模块以TCP/IP(传输控制协议/网间协议)方式开启STK软件端口。利用超过150个Matlab软件指令,如使用STK软件支持的分析功能一样,Matlab软件的用户可使用STK软件的功能对轨道、姿态、星下点等进行建模与分析。
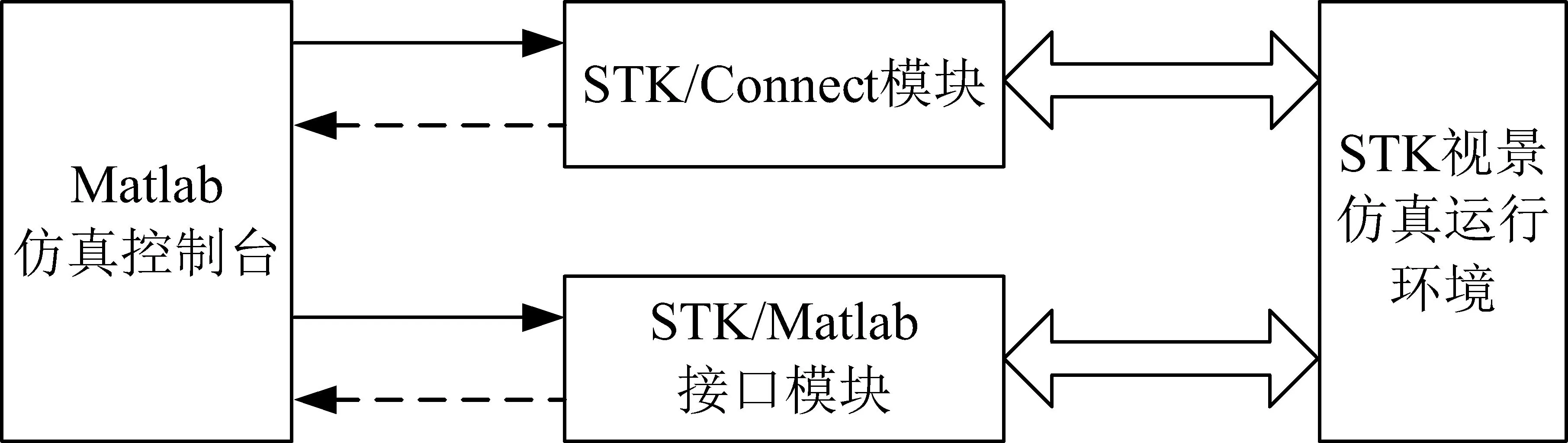
图5 Matlab与STK软件连接的系统结构Fig.5 Connection between Matlab and STK
3.3 姿态数据转换与场景显示控制
实现姿态转换与显示的过程如下:在每次接收到飞行器数据时,根据数据中包含的卫星时间信息和输入的卫星轨道参数确定该时刻的卫星轨道位置、速度,以计算从轨道系至地心惯性系下的转换矩阵;之后,读取该时刻对应的姿态数据,在该矩阵的坐标变化下,可获得姿态设置命令stkSetAttitudeCBI的输入参数,从而驱动卫星姿态实时显示。若卫星的遥测数据含星体四元素姿态信息,则可直接利用该数据进行驱动显示。
利用姿态四元素形式设置飞行器姿态命令如下:
stkSetAttitudeCBI(objPath, ‘Earth’, Tii, quats)
仿真场景的显示属性,例如空间环境、传感器和轨道以及成像点、视角的变换等,则可以通过STK/ Connect接口函数实时控制,主要控制的显示属性包括[8]以下内容。
1)成像点、视角的变换
在仿真准备阶段和仿真运行过程中,用户往往需要改变成像点和视角,以实现对仿真场景整体或局部的观察。显示控制模块利用STK/Connect 接口函数实现了成像点和视角的变换,且不需要暂停仿真运行。例如,使用VO3DView命令用来给一个三维窗口设定一些成像点观察参数命令如下:
VO * 3dView EyeFromTo Satellite/sat
2)传感器、太阳能帆板等细节的指向控制
通过定义传感器的指向,表征卫星设备之间的服务关系,例如将地面站传感器指向某颗卫星表征该地面站正在为该卫星服务。通过对这些细节的控制,使仿真过程更加逼真生动。例如,使用AddArticulation命令驱动天线X轴在0 s到600 s内从0°转至-360°的命令如下:
VO*/Satellite/sat AddArticulation ArticulationName MainRotateBG Transformation Name rotateX Duration 600 StartValue 0 EndValue -360
3)航天器轨道及星下点轨迹等的显示控制
航天器轨道的显示,可以为用户提供一个直观的轨道及星下点运动轨迹,特别是在航天器进行变轨的时候,用于对比变轨前后轨道变化;星下点轨迹亦可以大致描述出航天器对地的覆盖区域。显示控制模块提供了对轨道、星下点轨迹等显示的开闭以及颜色、粗细的控制。
4 整星测试验证
以某敏捷遥感卫星的布局构形为参考,建立了卫星三维模型,并在Matlab&STK软件下开发了卫星实时数据可视化判读平台。以某敏捷卫星成像测试过程为应用实例,分析目标是对某轨6条带拼幅成像模式下主动匀角速度姿态敏捷机动数据结果进行判读(0.1 s/数据点,置信度99.7%)。图6~7是6个主动条带的曲线分析结果,可以看出执行轨迹经纬度与计算规划值的比对分析结果,通过曲线实时比对分析,可直观显示遥测数据与规划数据的轨迹高度重合,验证了星上轨迹规划算法的正确性。图8~9是判读分析程序计算的第3条带摄影点移动速度和地心角速度,执行结果与理论数据轨迹一致,证明在已有遥测基础上,通过实时计算对复杂技术指标的执行结果进行辅助判读,可进一步验证星上算法的合理性,增强判读全面性。图10是条带拼幅成像过程三维可视化场景,提供了直观判读姿态机动过程、分析卫星机动极性正确性的实用工具。
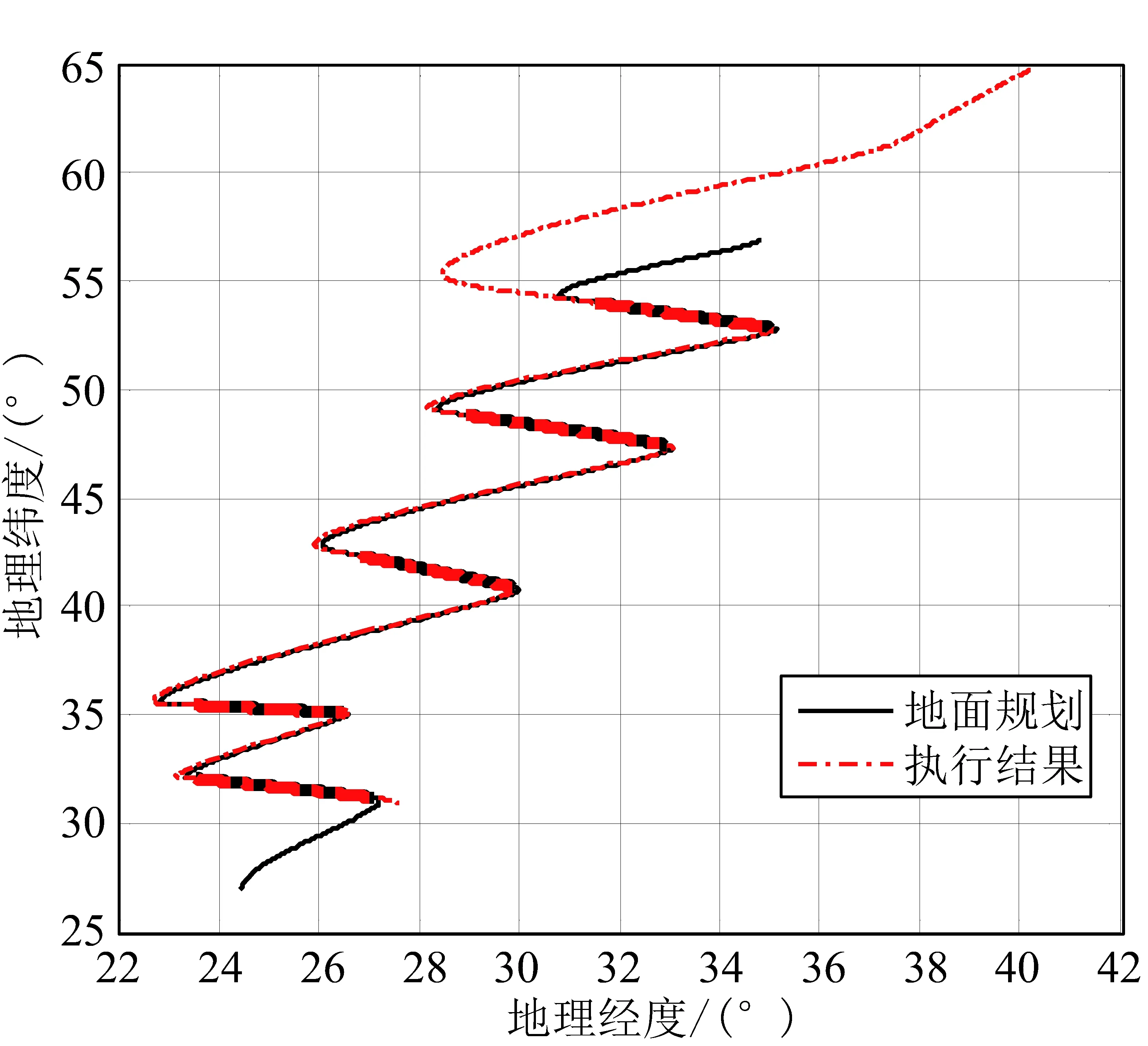
图6 成像点经度判读曲线Fig.6 Longitude curve of image point
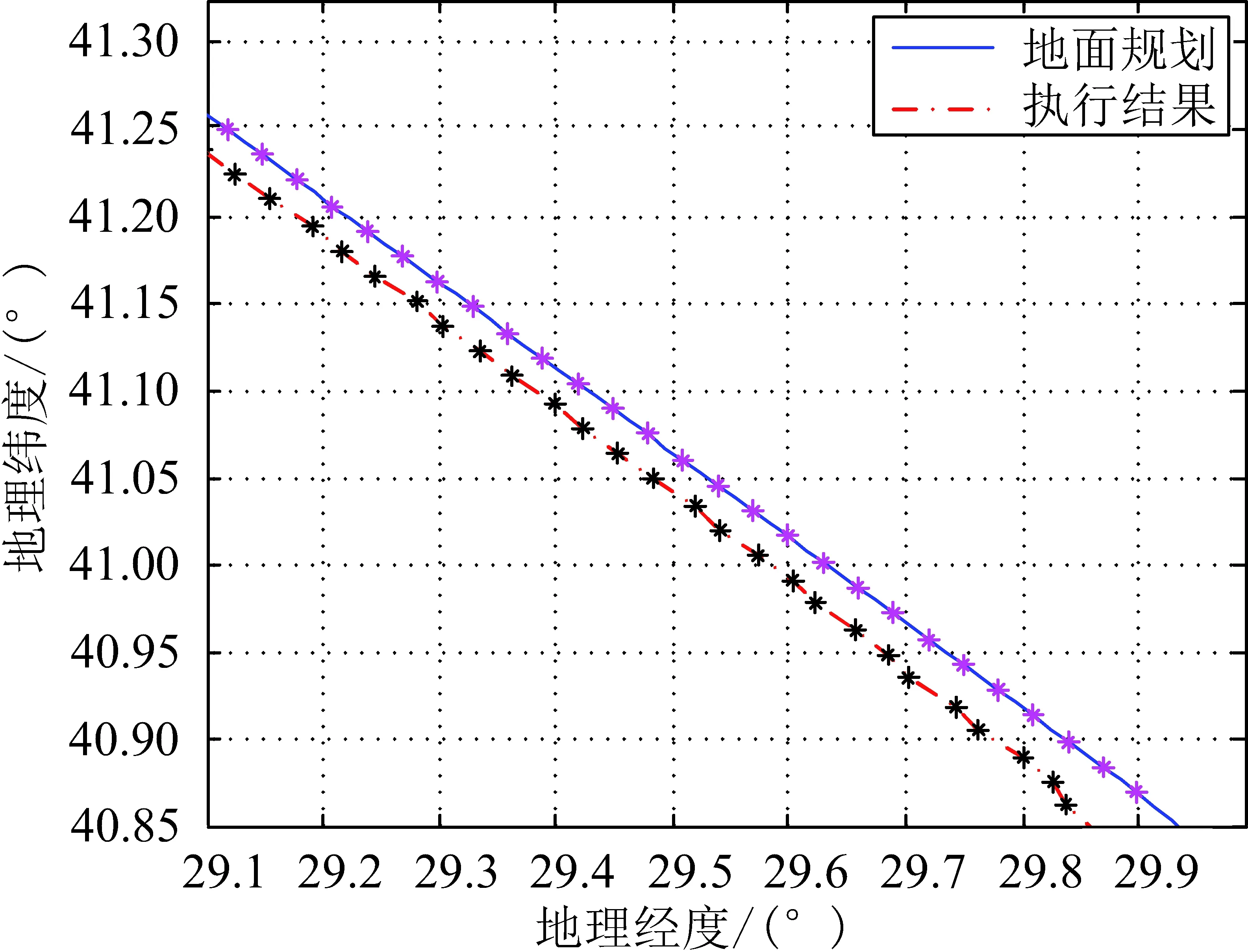
图7 成像点纬度判读曲线Fig.7 Latitude curve of image point
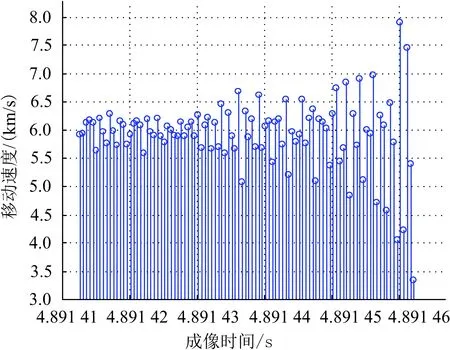
图8 第3个条带摄影点移动速度放大图Fig.8 Moving speed of imaging point in the 3rd strip

图9 第3个条带摄影点地心角速度放大图Fig.9 Geocentric angular velocity of imaging point in the 3rd strip
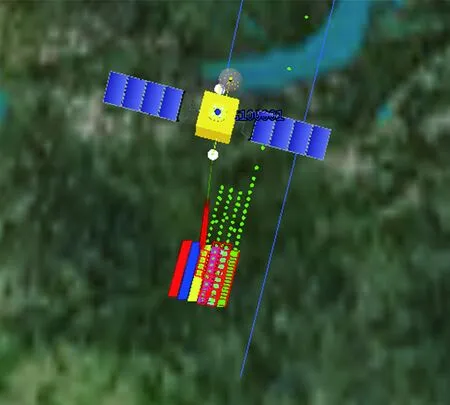
图10 6条带拼幅成像过程三维可视化效果
5 结束语
本文基于敏捷卫星载荷成像姿态机动数据判读需求,设计并开发了过程分析与可视化判读平台,对敏捷卫星的测试判读具有实用价值。该平台能自动提取条带数据并计算每个条带的技术指标,进行成像轨迹分析,辅助判读姿态机动过程指标符合性,为未来复杂敏捷机动卫星测试判读提供了理论参考。同时,在实时数据或离线数据驱动下利用STK软件实现卫星敏捷机动成像过程的直观、简洁的可视化演示,为航天器飞行数据在空间环境的三维重现等提供了直观实用的工具,增强了卫星轨道姿态控制视景仿真的灵活性和可操作性。