具有GPRS通讯的FMCW雷达道路运动目标探测系统
2019-01-10张浩源秦会斌
张浩源,秦会斌
(杭州电子科技大学 新型电子器件与应用研究所,浙江 杭州310018)
0 引言
对重要交通道路实现无人值守自动监控,可以节省人力,降低成本,有较高的实施应用价值。同时,红外、微波雷达等具有探测距离远、全天候运行、抗干扰能力强、隐蔽性高等优点,能够自动监控重要路口,满足无人值守的需要。非接触探测技术在其他方面也都有广阔的应用前景,如桥梁监控、仓库监视、环境监测等。目前,大多数交通监视系统都只采用摄像头来采集车辆信息,若摄像头出现故障或者遭受恶劣天气影响,必然会导致探测系统无法采集相关数据。由于不同的工作原理、特征,不同的运动目标检测传感器有不同的应用范围,因此应该尽量让其处于符合其特征的环境中进行探测,否则会导致探测到的数据出现误差甚至是错误。而多传感器,如被动式红外技术和雷达技术的联合使用,可以适应更多的环境,提供高精确度的车辆数目、距离的识别。同时,使用GPRS模块,确保了通讯稳定性,服务器端远程接收雷达监控数据,节省了人力,降低了成本。
1 系统总体设计
本文设计了采用红外、微波和GPRS三种技术的运动目标探测系统。主要由微波、红外和GPRS模块以及单片机主控模块组成。其结构如图1所示。
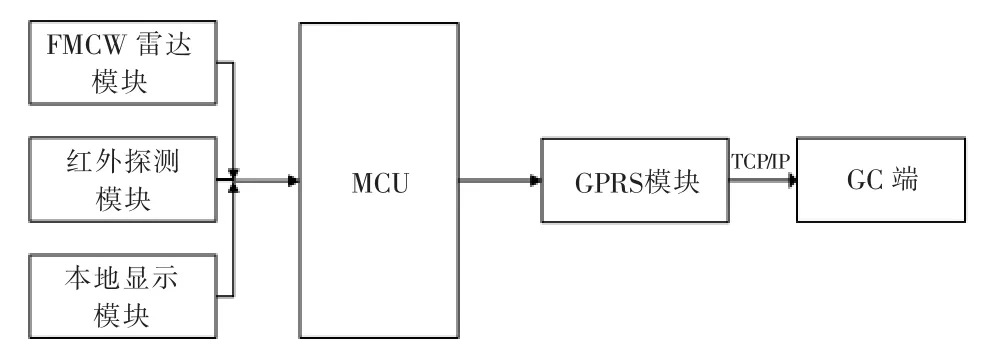
图1 运动目标探测系统总体结构
2 微波探测模块
FMCW雷达利用雷达发射频率调制的微波信号。由介质振荡器发出一个频率为f的微波信号,f受调制波控制,一部分发射出去,另一部分进入混频器作为本振信号。随后,天线将回波信号传递到混频器,和此时频率已经变化为f′的实时本振信号进行混频,混频后得到差频信号f0,通过对差频信号进行采样,判断目标的距离与运动速度。
FMCW雷达的调制信号普遍选用的是锯齿波和三角波[1]。其中,锯齿波只能测量距离,无法测量目标速度信息。三角波可以同时获得这两种信息,因此选用三角波作为调制信号。其目标距离R的计算公式如式(1)所示:

其中R是目标距离,c为光速,ΔF为在三角波调制下微波信号频率变化差值,fd为差频信号的频率,T为回波信号时间延迟。由此,可以对差频信号进行FFT算法计算,得到其频谱,确定差频信号的频率,进而获得目标的距离信息[2]。
硬件设计主要是对差频信号的滤波放大,如图2为雷达模块的整体框图。
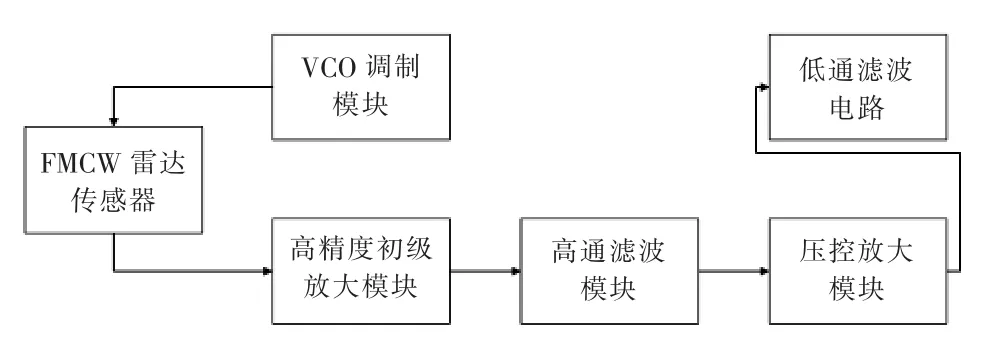
图2 雷达模块整体框图
本设计采用的FMCW雷达为瑞士Rfbeam公司的K-LC1a雷达收发器。该收发器利用TLV5616产生三角波作为调制信号,控制K-LC1a发射线性扫频信号,当有反射信号时,反射信号与收发器泄漏的本振信号在混频器中混频后产生携带距离信息的差频信号。差频信号经过初级放大电路和次级放大电路,作为输出信号供单片机分析。为减少噪声信号干扰,需要设计带通滤波器,本文使用通频带的频率响应曲线平滑的巴特沃斯滤波器。利用LM324运算放大器设计了一个二阶低通滤波器和一个二阶高通滤波器,从而形成带通滤波器。经过处理的差频信号提供给单片机采样分析,使用FFT算法计算目标的距离与速度信息。
具体设计中,斩波稳零式运算放大器噪声较小,故利用斩波稳零式运算放大器作为处理电路中的第一个设备,可以顺利减小噪声对信号的影响。但是,由于斩波稳零式运算放大器一般会选择高增益的设计,对于外部干扰的抵抗能力也会变弱。由于运算放大器会放大所有接收的信号,所以需要在放大过程中添加滤波器,组成带通滤波器实现只通过期望的目标信号。利用REF5025提供基准电压,精密运算放大器ICL7650对雷达信号进行初级放大。如图3所示,其放大增益约为33倍,同时抑制了高频噪声,满足对雷达信号初级处理的要求。
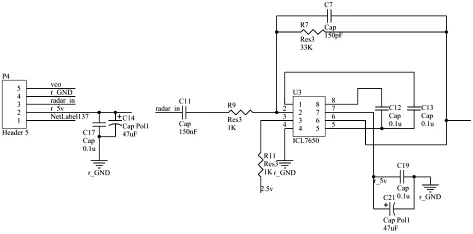
图3 雷达信号初级放大电路
次级放大电路中,由于雷达差频信号的电压输出范围较大(20~200mV),在次级放大过程中,容易出现信号饱和,为了实现信号的归一化,便于单片机对差频信号采样,需要使用压控运算放大器。利用压控信号对次级运算放大器的放大倍数进行调节,保证信号归一性,便于单片机对信号进行识别,使用了压控运算放大器VCA820对信号进行二次放大,如图4所示。
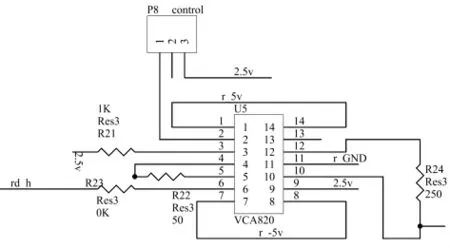
图4 雷达信号次级放大电路
通过控制VCA820的2引脚的电压即可实现增益倍数的控制,由此可以实现总增益10~100倍的次级放大器设计。基于差频信号的输出,通常控制其增益为10~30倍,在差频信号经过初级放大电路和次级放大电路处理后,其增益最大约可至60dB,可将雷达信号转换为0~3.3V模拟信号输出,满足ADC对雷达信号采集的要求。
带通滤波电路的目的是抑制所有的在通频带之外的信号,只保留所需的频率信号。利用带通滤波器来限制信号带宽,必须考虑滤波器元件的频率响应、功率和损耗。计算得出,如果使用600Hz的三角波作为调制信号,可知对于1~20m以内的探测物体,差频信号输出频率约为2k~40kHz。所以设计了通频带为1k~100kHz的的带通滤波器。其仿真频率响应曲线如图5所示,满足抑止噪声信号需求。
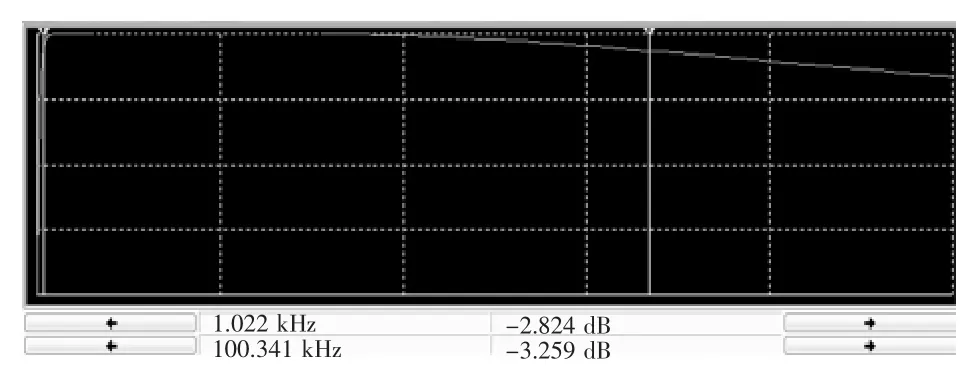
图5 雷达滤波器频率响应曲线
故基于运算放大器LM324设计了二阶巴特沃斯滤波器,该类型滤波器通频带平坦,并且通频带之外频率响应逐渐变化。通过高通滤波器和低通滤波器结合,构成了带通滤波器,降低了噪声对差频信号的干扰。
雷达探测程序流程如图6所示,在唤醒之后,利用串口控制TLV5616生成600Hz的三角波,通过DMA接收ADC采样的雷达差频信号,并用FFT分析,确定其频率的最集中处,根据距离公式算出目标距离。
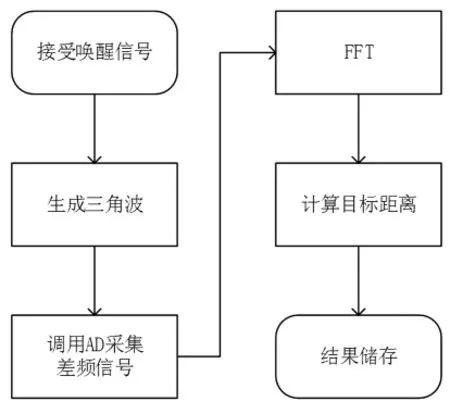
图6 雷达探测流程
3 红外探测模块
红外探测具有很强的隐蔽性,同时具有较强的穿透能力和全天候能力,已成为现代光电子技术的重要组成部分。红外小目标探测在红外报警和国防等大量重要工程中发挥了不可或缺的作用[3]。通过将红外信号作为预警信号,在预警后开启微波模块,减少了系统功耗,为远程监控提供更长时间的支持。
本文利用了芯片EG4002组成红外信号放大电路,同时包含了电压比较电路,将报警信号传输给单片机。如图7所示为整体电路框图。

图7 红外探测模块整体电路框图
由于PIR传感器输出的信号为10Hz左右,幅值为几毫伏的低频信号,而噪声信号一般高达数十kHz,所以设计了具有抑止高频噪声能力的放大比较电路。设计的电路如图8所示。
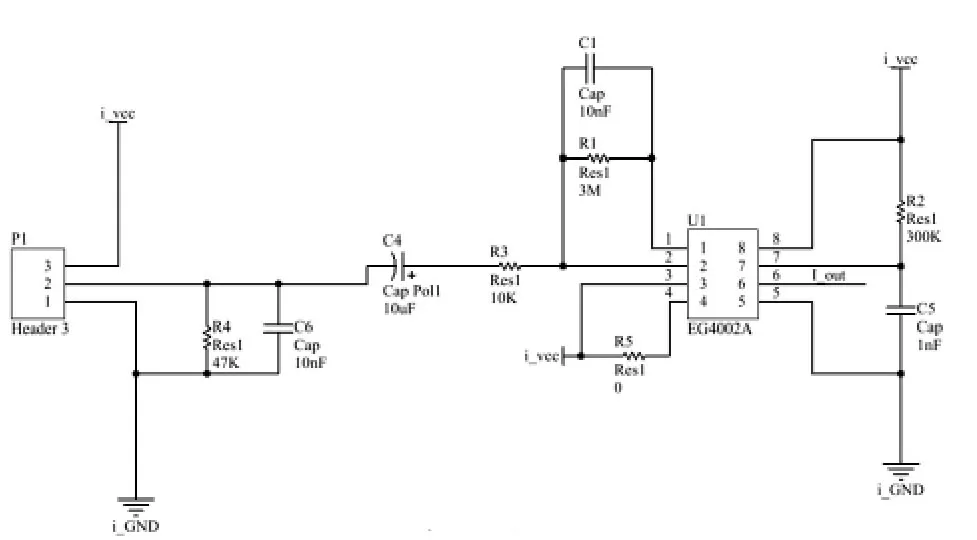
图8 红外信号放大电路
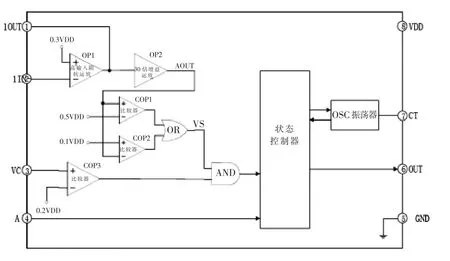
图9 EG4002结构
其中,EG4002内部自带定时功能和30倍的电压增益,便于在红外信号处理电路中使用,简化了设计。其外部增益可通过R1调节。EG4002内部结构如图9所示。在经过内部初级放大后,红外电路产生的信号仍为模拟信号,为了便于后续单片机接收,内置了电压比较电路。电压比较器通过运算放大器比较两端电压,如果输入电压不符合预设端口的阈值电压范围,运算放大器将会产生电压反转,从而将模拟信号转为数字信号,作为预警信号输出。
设计中选用了型号为7703-1的菲涅尔透镜,如图10所示,其探测距离大于24m,可视角度为70°,大大增强了系统的探测距离[4]。
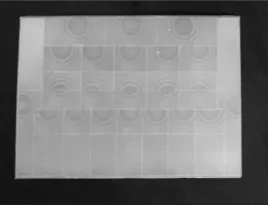
图10 菲涅尔透镜
4 GPRS模块通信设计
GPRS模块使用了GA6模块,在接入GPRS网络后,利用TCP/IP协议可以实时将本地模块的报警信息传输给服务器端,实现了对道路信息的远程监控。STM32F103利用串口同GA6进行通讯,雷达所探测到的报警信息经过STM32的处理,通过串口发送给GA6,如图11所示。
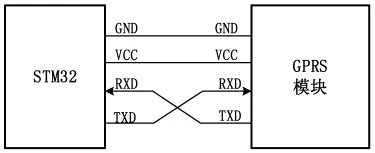
图11 STM32与GPRS模块的通讯
GA6将接收到的串口数据封装为TCP/IP数据包,发送给GPRS网络,通过GPRS网络和互联网将数据包传递给服务器端,服务器端通过数据包获得串口数据,并将串口数据显示在页面上,从而实现了系统探测数据的远程传输[5],整个流程如图12所示。

图12 GPRS模块发送数据流程
在PC端,使用Windows sockets来接收数据包,该传输协议可以通过TCP/IP来收发数据,利用winsock来接收数据包,获取雷达探测系统数据。
5 系统测试
红外信号在有移动车辆或人经过时将产生方波预警信号,通过外部触发将红外信号传输给单片机,在预警后开启微波模块,减少了系统功耗,为远程监控提供更长时间的支持。其预警信号如图13所示。
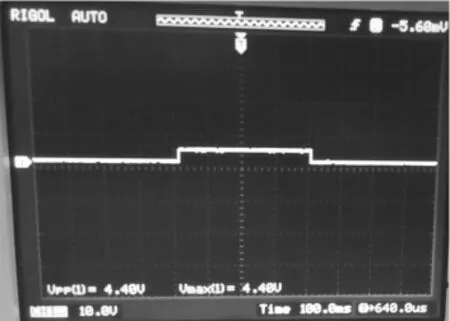
图13 红外预警信号
微波模块正常工作时,在三角波调制下会产生约2kHz~40kHz的差频信号,微波雷达的差频信号在运动目标出现时,频率会发生 变化,经过电路处理之后传输给单片机的信号如图14。
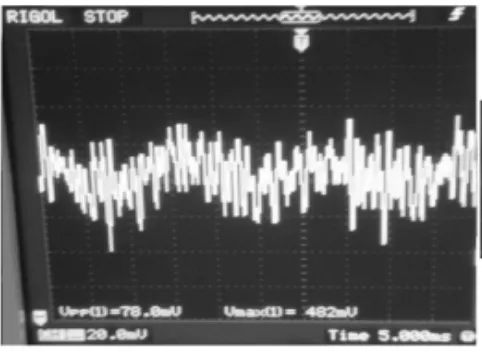
图14 雷达差频信号

图15 LCD显示
其频率经过单片机FFT分析后,主要集中在约6kHz处,需要使用显示模块显示目标距离和经过的数量,其显示如图15所示,第一行为探测到的距离,第二行为经过探测区域车辆数量。
通信显示模块接收雷达发送的探测信息,如图16所示。从通讯数据中可以得到发现道路目标的最近距离,并可以根据雷达系统编号来查询系统所处地点,实现了远程无人的道路运动目标监控。
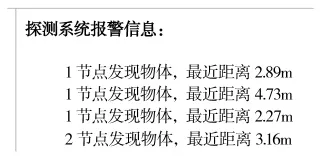
图16 服务器接收到的报警信息
6 结语
本文利用GPRS模块,将FMCW雷达和红外传感器探测到的道路运动目标信息远程传输,实现了远程无人的道路运动目标监控。其中对于FMCW雷达,进行了三角波调制电路、差频信号的信号处理放大滤波电路的设计;设计了红外预警信号电路,利用GPRS模块通过TCP/IP协议将雷达测到的运动目标数据传输给服务器端,并在页面上显示报警信息。利用GPRS模块具有的远程通讯功能、红外系统的预警功能,减少了人力、能源消耗,降低探测系统成本,在现实生活、工业等方面具有实用价值。