基于模糊控制的智能节水灌溉控制系统设计
2019-01-09刘天宇徐晓辉
吴 迪, 刘天宇, 宋 涛, 徐晓辉
(河北工业大学电子信息工程学院,天津 300401)
我国是一个严重缺水的国家,农业灌溉用水量占各行业总用水的60%以上,而传统的沟灌、漫灌或人工淋水的灌溉方式对水的有效利用率只有45%,大部分的水在输送和灌溉过程中被白白浪费掉了[1],相比之下,发达国家农业用水有效利用率高达70%~80%。近年来,喷灌、滴灌等节水灌溉技术得到迅速推广和应用,其中滴灌水的利用率更是达到了95%,同时还可以结合施肥,提高肥效1倍以上,节水增产效果明显,提高滴灌等节水灌溉方式的比重将是我国未来灌溉的发展方向[2-3]。因此,适用于滴灌等节水灌溉方式的灌溉控制系统应运而生。
在节水灌溉中,目前大多数仍是手动控制,即管理人员根据自己的经验对农田进行灌溉,还有一些半自动灌溉控制系统,大多为时间型控制(或者称为时序控制)[4],即管理人员凭借经验设定好电磁阀的开启和持续时间自动运行,这2种灌溉方式都比较粗糙,而且不能根据作物在不同的土壤质地、不同生长时期、不同的天气条件下灵活灌溉。
综上所述,本研究设计一种基于模糊控制的智能节水灌溉控制系统,选用低功耗的C8051系列单片机作为核心处理器,利用无线传感器网络和小型气象站实现对农田信息的采集,运用模糊控制对农田需水量进行分析,并通过射频技术实现对电磁阀开启时间的无线控制,以此实现对农作物的精准灌溉,从而达到最大化节水的目的。
1 智能节水灌溉控制系统的组成与工作原理
智能节水灌溉控制系统主要由中央控制器、农田信息监测点、无线电磁阀控制器等3个部分组成。系统通过农田信息监测点采集农田的土壤湿度、空气湿度、空气温度、风速、太阳辐射等信息,并通过Wi-Fi或者485总线传送给中央控制器;中央控制器利用模糊控制算法对接收到的农田信息数据进行分析并存储,得到当前作物的灌溉决策;当需要灌溉时,中央控制器根据灌溉决策控制射频发射模块发送灌溉指令,相应的无线电磁阀控制器接收到指令后开始进行灌溉作业。系统整体架构如图1所示。
1.1 中央控制器的设计
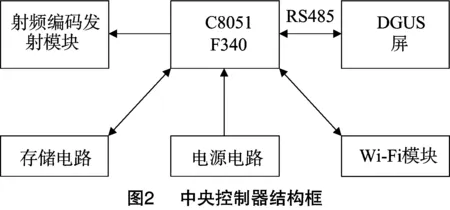
中央控制器包括单片机、射频编码发送模块、Wi-Fi模块、迪文图形应用服务软件(DGUS)屏、存储电路和电源电路,其结构框如图2所示。基于对系统功能和成本的考虑,中央控制器选用C8051F340单片机作为微处理器。该芯片体积小、功耗低,有多达64 kB的片内flash存储器,2个增强型通用异步收发传输器(universal asynchronous receiver/transmitter,简称UART)和增强型串行外设接口(serial peripheral interface,简称SPI),以及40个可编程端口I/O和交叉开关。中央控制器采用LM2596和AS1117电压调节芯片组成电源电路,输出5、3.3 V 电压给其他芯片和模块供电,如图3所示。
采用USR-WiFi232-B模块作为中央控制器与各土壤湿度监测节点之间的通信模块。此模块支持AP/STA工作模式,串口速率高达1 Mbit/s,可以实现双串口三Socket通信,支持超低功耗模式,支持深度休眠。通过网页或者AT(attention)指令设置好WiFi模块参数(包括Socket连接协议、端口、串口波特率、数据位、校验位、停止位、网络名称、密码等)后,选择STA模式,连接到无线接入点AP。中央控制器的Wi-Fi模块通过无线接入点实现与土壤湿度监测节点的相互通信。
射频编码发射模块采用PT2264芯片作为编码器,PT2264支持最大12位三态地址管脚,最多可提供312个地址码,高达4个数据管脚,从而可大大减少编码冲突,利用互补金属氧化物半导体(complementary metal oxide semiconductor,简称CMOS)技术, 功耗低、抗噪声性能高。当需要开启某个电磁阀时,单片机控制PT2264对A0~A7和A8/D3~A11/D0管脚进行编码,生成特殊的地址和数据编码波形(每个管脚可指定“0”“1”“f”3种状态),并通过DOUT管脚输出给315 MHz超再生射频发射模块,把编码发送出去。

人机交互设备选用DGUS屏。DGUS屏的配置界面如图4所示,灌溉状态指示灯绿色表示正在灌溉,红色表示已停止灌溉,用户还可以通过点击状态按钮指示灯来手动开始或停止灌溉。点击灌溉区域编号还可查看该区域农田预计灌溉时间和环境参数。


1.2 农田信息监测点的设计
农田信息监测点主要由土壤湿度监测节点和小型气象站等两部分构成,小型气象站架设在中央控制器附近,与中央控制器通过485总线进行通信。土壤湿度监测节点由土壤湿度传感器、单片机、电源模块和WiFi模块组成(图5)。
Wi-Fi传输速率快、开发难度低、成本低且本设计选用的低功耗USR-WiFi232-B模块体积小、 稳定性也较高、 传输距离可达300~400 m,符合在农田环境下低功耗、可靠性强的要求。此外,Wi-Fi模块方便接入外部网络,可实现系统与手机、计算机直接互联,使控制更加灵活多变。对土壤湿度的测量选用TDR土壤水分传感器,它可以测量土壤的介电常数,从而直接稳定地得到土壤的水分含量。土壤湿度监测节点通过Wi-Fi模块连接到无线接入点AP,实现与中央控制中心的数据交换,组成一对多的星型拓扑结构无线传感器网络。土壤湿度传感器定时采集不同土壤深度的数据,并通过具有8位逐次逼近式PCF8591 A/D转换模块把模拟量转变成数字量给单片机,单片机再按照设定好的协议把数据封装成帧,并通过WiFi模块发送给中央控制器。

1.3 无线电磁阀控制器的设计
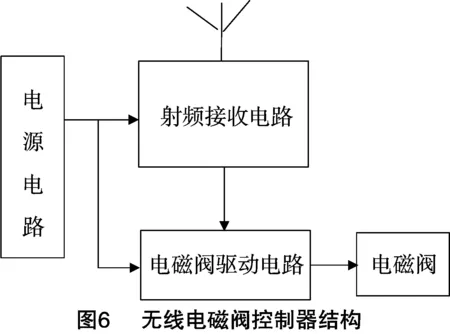
无线电磁阀控制器由电源电路、射频接收电路、电磁阀驱动电路和电磁阀组成(图6)。其中,选用的磁保持式电磁阀采用掉电保持的关键技术。当开启电磁阀时,只须输入 50 ms 的12 V正向直流脉冲,之后电磁阀保持工作状态,无需电能,当须要关闭电磁阀时,再输入反向信号电流。它灵敏度高、稳定性高、消耗功率极低,这使得选用较小容量蓄电池供电成为可能,且不存在发热现象,以上特点使该电磁阀能采用全密封方式,防潮防腐性能良好。
相较于大多数固定编码的射频收发控制形式,本设计射频接收电路为自学习型,使用灵活。按下学习开关,PT2294把从射频接收模块接收到的编码波形自动解码并保存,学习完成后只能识别学习过的编码,有效防止冲突碰撞。根据从射频接收电路接收到的指令,电磁阀驱动电路采用H桥驱动芯片L9110产生正反脉冲,从而控制电磁阀的开闭。
2 模糊控制的实现
在传统的控制系统中,都是通过已知的精确数学模型来建立算法,但对于农业灌溉系统,由于其非线性、大惯性、滞后性的特点,想要建立精确的数学模型是很繁琐的,实现起来非常困难。模糊控制是一种非线性控制方式,是根据专家经验进行决策,无须建立精确数学模型,在处理农业灌溉这种大惯性系统问题时就显得十分有效[5-6]。在农业灌溉系统现有的模糊控制中,大多数都只考虑了土壤湿度1个变量,即只以土壤湿度为输入,从而得到灌溉决策。作物对水分的吸收主要靠根部,而吸收的水主要用于自身生长和蒸腾作用的散失,蒸腾作用又和气象环境紧密相连。由此可知,土壤条件、气象条件以及作物生长特性都对作物需水量有重要影响[7]。所以,在本设计中选用作物的腾发量(evapotranspiration,简称ET)和土壤湿度(electrical conductivity,简称EC)作为输入变量,作物灌溉时间(U)为输出。先把2个输入量模糊化输入到系统中,然后系统根据数据库和规则库进行模糊推理,最后解模糊,输出作物所需的灌溉时间。模糊控制系统的结构如图7所示。
2.1 模糊控制输入量的获得
模糊控制系统的输入量土壤湿度由监测节点的土壤湿度传感器直接测得, 腾发量的获得则是先根据系统测得的空气温湿度和风速等相关参数利用公式计算得到参考作物腾发量(ET0),然后再乘上作物系数求得各阶段的实际作物腾发量,计算公式如下:

ET=KCET0。
(1)
式中:KC表示综合作物系数;ET0表示参考作物腾发量。
研究表明,Penman-Monteith公式使用常规气象数据即可求得ET0,特别是在变化的气候环境,计算时间尺度较短的情况下,Penman-Monteith公式计算精度优于其他公式,又具有易于操作等应用价值,故采用Penman-Monteith公式计算参考作物腾发量[8-9],公式如下:
(2)
式中:ET0表示参考作物腾发量,mm/day;Δ表示温度水汽压曲线斜率,KPa/C;Rn表示净辐射,MJ/(m2·d);G表示土壤热通量密度,MJ/(m2·d);γ表示湿度计常数,KPa/C;T表示2 m高处的平均气温,℃;U2表示2 m高处的风速,1/ms;es表示饱和水汽压,kPa;ea表示实际水汽压,kPa。
2.2 模糊灌溉决策
以经济作物番茄为例进行探讨。番茄对水分需求很大,一般要求土壤水分含量在45%~90%之间,在不同的生长时期,对水分的需求也不一样[10]。根据农业部门长期实践的总结,本系统制定的番茄灌溉生长阶段根层土壤水分控制标准如表1所示。

表1 番茄灌溉生长阶段根层土壤水分控制标准
以番茄结果期的模糊决策模块为例,具体介绍灌溉控制策略的实现。由表1可知,番茄结果期最适宜的土壤湿度为75%,低于65%或者高于85%时,番茄不能正常生长发育,因此番茄结果期土壤湿度变化范围设置为65%~85%,农田环境信息每30 min采集1次,作物腾发量每24 h计算1次。从已有研究数据来看,番茄结果期的腾发量变化范围在 7~16 mm/d。
系统采用的模糊控制算法为合成推理的查表法。系统先采集土壤湿度,空气温湿度等参数,然后对输入ET和EC以及输出U进行模糊化,考虑到节水灌溉实际条件和控制精度,把模糊化后的土壤湿度值EC、作物腾发量ET以及灌溉时间U的模糊语言变量划分为7级{正大,正中,正小,零,负小,负中,负大},简记为{PB,PM,PS,ZO,NS,NM,NB},其论域设为:ET,{3,2,1,0,-1,-2,-3};EC,{3,2,1,0,-1,-2,-3};U,{6,5,4,3,2,1,0}
其中,对于EC而言,ZO表示最适土壤湿度;NB、NM、NS表示小于最佳土壤湿度的3个程度,强度依次减弱;NB表示极度缺水;PS、PM、PB表示大于最佳土壤湿度的3个程度,强度依次增加;PB表示极度缺水;对于腾发量ET,PB到NB分别表示腾发量的从强到弱的7个强度;对于灌溉时间U、PB到NB代表灌溉时间从60 min到0 min依次减少。
在把输入由精确量转化为模糊量之后,就要确定模糊变量的隶属度函数,考虑到本灌溉系统编程的简明性和实用性,本设计选用三角形隶属度函数对输入输出量进行模糊化处理,如式(3)所示。
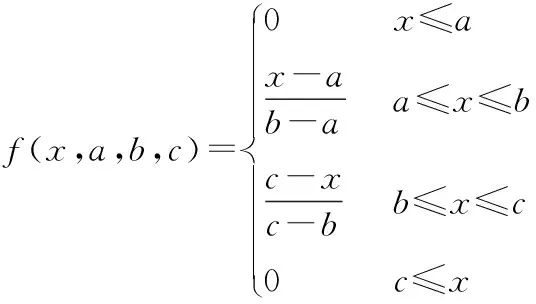
(3)
输入ET、EV和输出U的隶属度函数如图8、图9所示。

根据农业部长期对节水灌溉的实践总结,可以得到模糊控制规则如表2所示。

表2 模糊控制规则
以第1条模糊控制规则为例,在这种双输入单输出的模糊控制器中,控制规则应写成“ifEC=NBandET=NBthenU=PB”的形式。在本系统中,采用Mamdani极小运算法进行模糊推理,采用隶属函数最大原则求取各相应控制量,通过Matlab建立模糊控制器并仿真,得到的模糊控制如表3所示,三维控制曲面如图10所示。

表3 模糊控制查询
3 系统软件设计
灌溉控制系统在运行时,首先对农田的环境信息进行采集,然后运用模糊控制推理出是否需要灌溉,若不需要灌溉则定时重复此程序;若需要灌溉则执行灌溉决策,程序流程如图11所示。


4 结论与讨论
本系统以C8051f340单片机为微处理器,通过有线和无线方式对农田环境参数进行采集,并与模糊控制相结合来获取农作物需水量,实现农田的精准灌溉。通过初步试验表明,该系统通信可靠,控制准确,运行良好。本研究设计电磁阀的无线控制方案,验证射频技术在农业无线电磁阀控制器上的可行性与可靠性。建立基于Penman-Monteith公式与模糊数学的多传感数据融合方法,综合考虑土壤水分含量和与农田腾发量相关的空气温湿度、风速、太阳辐射等因素的影响,能更加精确地确定作物需水量。如果该系统应用的地理环境或作物种类有所改变,只需修改系统的输入输出隶属度函数,即可改变系统的性能,满足不同对象的控制要求。在以后的研究中,该系统还须增加远程通信模块,实现对农田的远程监控。