五自由度移动机械手的动力学建模与仿真
2019-01-08梁宏宝夏飞韩东
梁宏宝,夏飞,韩东
(东北石油大学 机械科学与工程学院,黑龙江 大庆 163318)
0 引言
石化加工领域多使用易燃易爆等化学品作为原料。诸如氨水、天然气、强酸等危险品的存储和管道运输等方面,一旦发生泄漏或爆炸事故,由于消防人员无法进入现场关闭阀门和检查管道泄漏点,只能停产进行人工修补,给企业带来巨大的经济损失。据统计设备出现裂纹是造成石油化工领域泄漏的主要原因之一,为了适应石化产业精细化发展以及业内对环保和生产安全的需求,设计了一款五自由度移动机械手,并对移动机械手的动力学特性进行了分析与研究。
移动机械手由受非完整约束的移动平台和固接在其上的机械臂构成。理论上它拥有无限大的操作空间,冗余度高[1],同时兼具工业机械臂的灵活性和移动机器人的快速到达特性[2]。但是从运动学的角度看,平台受到的非完整约束为整个系统引入了冗余的自由度。系统的控制输入增多,动力学耦合复杂[3]。基于运动学模型设计的控制器在高速的场景下无法满足使用者的需求。因此,对它的动力学分析尤为重要。本文使用牛顿-欧拉方法计算了在末端执行器轨迹已知的情况下机械手的逆动力学模型,并使用ADAMS对样机的三维模型进行了仿真,分析结果为样机的结构优化和动态控制器的设计提供了技术依据。
1 机械系统及运动学参数
1.1 三维模型
移动平台上机械手的三维模型如图1所示,它是所有关节均为旋转副的五自由度关节机械臂。按照修补程序中手端的动作顺序,关节1、2、3的运动保证手端准确定位,关节4、5的运动确定手端的俯仰角度,完成修补前准备工作。

图1 机械臂三维实体模型
1.2 运动学参数
运用Denavit-Hartenberg参数方法建立关节机械手的连杆坐标系如图2。其中,x0y0z0为它的基坐标系,基坐标系原点位于第一关节的轴线与底座的交点处,x6y6z6为它的工具坐标系(手端,不计入机械手自由度)。

图2 机械臂连杆坐标系
对应的连杆参数见表1,表中关节旋转角的变量范围已给出。相邻两连杆之间的旋转矩阵如下:



表1 机械手的连杆参数表
2 动力学建模
2.1 动力学模型的简化
一个完整的移动机械手系统的结构还包括承载机械手的移动载体,由于作业区域的地面路况不同,无法获得和精确地控制移动机械手的位姿。因此,为了保证在复杂环境中移动机械手能被准确定位,在平台运动时,机械手不接受电动机给出的速度指令,位姿不发生变化。当平台定位准确后停止运动,机械手接着完成位姿调整,整个准备工作结束[4]。所以,分析整个移动机械手的动力学特性可以简化为已知机械手的手端运动规律或者受到的载荷求解。为了实现这种运动,驱动器(电动机)需要给机械手每个关节一定的力(力矩)[5],该问题等价于给定参数,推导出机械手的逆动力学模型。为了使建立的逆动力学模型能在一定程度上反映机械手动力学特性的同时还能便于编程计算,将图1中的实体进一步简化:忽略弹性变形、刚度和质量分布均匀。
2.2 牛顿-欧拉动力学递推算法
1)由基座向手端迭代计算速度、加速度
(1)
(2)
(4)
(5)
(6)


2) 由手端向基座迭代计算驱动力矩和关节实际受力
ifi=i+1iRi+1fi+1+iFi
(7)
ini=iNi+i+1iRi+1ni+1+iPCi×iFi+iPi+1×i+1iRi+1fi+1
(8)
(9)
其中,ifi,ini分别连杆i-1作用在连杆i上的力和力矩,τi为关节i的驱动力矩。
由于机械臂的关节全部是旋转关节,在忽略了移动平台对机械手的作用后,各个关节的平衡力矩和驱动力矩在矩阵上是等价的[6]。把由式(1)-式(6)所得到的杆件的参数代入式(7)-式(9),即可得出各个关节的驱动力矩。
2.3 驱动力矩的计算
已知条件:
2) 由于连杆简化为质量分布均匀的刚性杆,各个连杆在其质心处的局部坐标系中的惯性张量可以表示为:

3) 连杆质心处位置矢量i+1PCi+1为:
i+1PCi+1=[li+10 0 0]T
综上可推导出五自由度关节机械手的动力学数学模型为:

其中:q表示描述平台运动的变量,一般为前轮的方位角θ。
3 仿真及结果分析
3.1 动力学仿真参数
考虑到ADAMS的实体建模功能不完善,采用Solidworks建立机械手的三维模型,并通过与ADAMS的软件接口,将模型导入至ADAMS。在机械手的关节处添加约束,并观察各个关节受到的驱动力矩大小。设定仿真时间t=30s,步长为0.01。给定手端标记点在笛卡儿空间的轨迹方程为x2+y2=0.9,预计该圆所在平面与连杆5坐标系的z轴方向垂直。假设末端执行器标记点从(0.9,0,0.3)出发做角速度为0.8rad/s的等速回转。
3.2 仿真结果及分析
仿真结果:对各个关节处的驱动力矩测量,组成的曲线在ADAMS的后处理器中进行编辑后输出[7],如图3-图7所示。
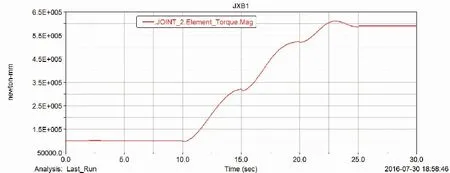
图3 关节1驱动力矩
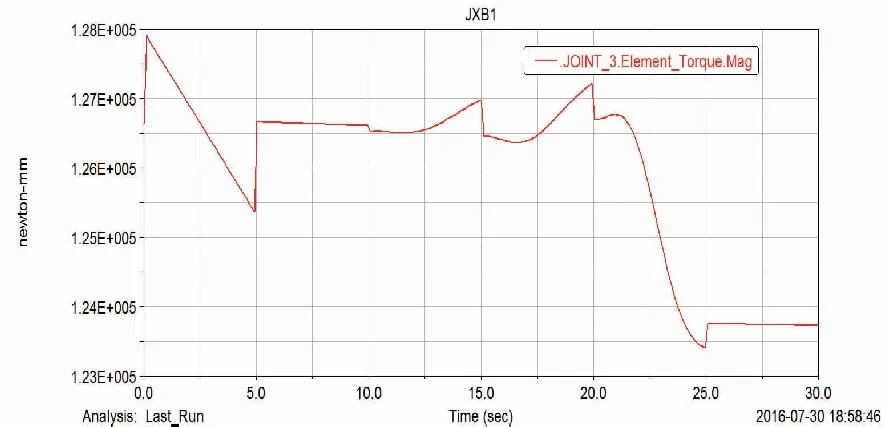
图4 关节2驱动力矩
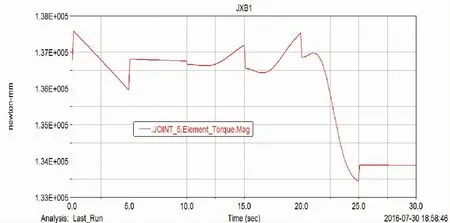
图5 关节3驱动力矩

图6 关节4驱动力矩
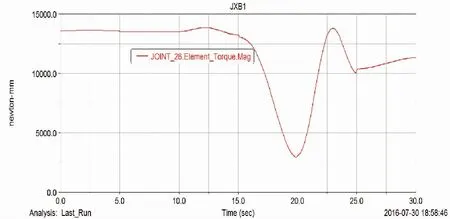
图7 关节5驱动力矩
结果分析:从曲线的走势看,没有明显的峰出现,说明运动过程较为平稳,没有经常出现振动等现象,但是在t=20s时,机械手的关节2和关节3受到的驱动力矩迅速减小(图4-图5),关节4和关节5受到的驱动力矩迅速增大(图6-图7)。这说明,仿真时间t=20s时对应的关节变量和机械手的位姿比较危险,应使用有限元等方法分析其最大受力点,以防止机械手发生退化。
4 结语
推导了五自由度关节机械手的逆动力学模型并利用ADAMS软件对该三维样机模型进行了仿真验证,分析得到的结果符合实际,这说明机械手结构设计较为合理,分析的结果对后期机械手的结构设计和参数优化以及轨迹跟踪控制等具有一定的参考价值。实践证明,随着有限元和仿真技术的飞速发展,传统的设计方法例如类比设计等已经不能满足工程应用提出的新要求,必须进行动态的分析和设计。充分应用系统动力学知识及仿真技术可以降低机械产品的开发成本、优化产品设计参数和提前分析这种设计的优劣[8]。