基于CPSO的参数优化控制方法在SVC中的应用
2019-01-08赵熙临吴胧胧徐光辉何晶晶
赵熙临, 汤 倩, 吴胧胧, 徐光辉, 何晶晶
(湖北工业大学电气与电子工程学院, 湖北 武汉 430068)
0 引 言
随着社会经济的发展, 大量冲击性负荷接入电网, 导致不平衡负载的产生, 引起电网电压下降、 电压波动及功率因数降低等问题, 威胁电力系统的安全运行. 为解决该问题, 静止型无功补偿器(Static Var Compensator, SVC)被广泛应用于电力网络, 作为稳定电压及补偿无功的重要手段[1-4].
传统比例-积分(Proportional-Integral, PI)控制器以其结构简单、 容易实现、 被应用于无功补偿[5-6]. 由于传统PI控制器控制过程中参数固定, 无法根据系统状态进行自我调节, 导致控制性能难以达到更高要求. 在传统PI控制的基础上, 各种优化算法与其相结合的控制策略引起了众多学者关注. 文献[7]基于神经网络和粒子群优化算法, 设计出一种PI参数自整定的SVC控制方式, 用于实现SVC接入点电压稳定. 文献[8]利用蚁群算法对PI控制参数进行动态调节. 上述方法均提高了控制的鲁棒性, 但算法的复杂度以及计算量大, 不适用于在线控制. 粒子群优化(particle swarm optimization, PSO)算法是一种基于生物智能的随机迭代算法, 其特征是实现简单、 修改参数较少. 因此, 近年来PSO算法得到了研究者们的关注, 被广泛应用于电力系统无功优化、 最优潮流、 负荷分配等工程领域[9-13].
但综合分析针对PSO优化策略的研究不难发现, 该方法均普遍存在初始化盲目、 早熟而易陷入局部最优、 后期收敛速度过慢等问题. 为了提高粒子群算法的寻优精度, 众多学者对该算法做了不同的处理, 将混沌理论与其相结合便是其中之一. 文献[14]通过混沌序列选择全局最优粒子. 文献[15]在基本PSO算法基础上, 引入混沌理论, 根据早熟机制判断粒子是否采用混沌优化, 以此达到提高PSO算法寻优性能. 文献[16]将种群分为三部分, 通过粒子自适应值增减混沌粒子数目, 从而达到求解精度. 这些方法均在一定程度上提高了PSO的收敛精度.
本文提出一种新的混沌粒子群优化(Chaos Particle Swarm Optimization, CPSO)算法. 该算法通过混沌运动生成粒子群位置, 择优选取高质量粒子, 以加快收敛过程; 通过调整惯性权重增强其寻优能力, 防止发生交叉震荡; 同时对每一代全局最优值进行混沌映射, 以增加种群的多样性. 通过搭建电力系统无功补偿仿真, 验证了该方法的有效性.
1 粒子群优化算法及参数分析
1.1 PSO算法基本原理
粒子群优化算法利用rand()函数随机初始化种群, 经过N次迭代获取到全局最优解. 其本质是通过粒子间的信息传递及粒子对自身行为的修正, 不断改变其运动状态, 从而逐渐获得最优解.



迭代过程中, 各粒子获取的目标函数值最小的位置记为Pbest=[pbest1,pbest2,…,pbestD], 粒子群的目标函数值最小的位置记为Gbest=[gbest1,gbest2,…,gbestD].
1.2 惯性权重的影响分析
影响PSO算法寻优精度的重要参数之一是惯性权重w. 一般而言, 在一定的范围内,w值越大, 粒子的全局寻优能力越强; 反之, 算法的局部搜索更精确. 因此, 对于任一粒子而言, 当粒子位置远离Gbest时, 增大w值; 而当接近Gbest时, 减小w值的搜索方式更符合实际优化需求.
考虑到基本PSO寻优的非线性特征, 采用线性递减的策略将不能满足实际需求. 因此, 本文采用一种基于粒子个体适应值的自适应调节策略, 即每个粒子的w依据其当前适应值来进行调整, 调整规律满足
(3)
式中:ωmin,ωmax分别为惯性权重w设定的下限和上限;fav为粒子群目标函数值的当前平均值;fmin为当前Gbest的目标函数值;fi为粒子当前的适应值. 一般来说, 惯性权值ωmin=0.4,ωmax=0.9时算法的性能最好[17].
(2)模拟结果与分析 首次浇高设定为冒口的3/5高度,冷却2h后进行补浇操作,让温度1590℃的同种钢液从冒口顶部注入冒口内,浇满后再次进入冷却凝固阶段。补浇时型腔内温度场如图2所示,从图中可以看到,补浇初始时铸件的凝固率并不高,约为18%,补浇的高温钢液与型腔内原有钢液立即均匀混合,随着补浇的进行,凝固率逐渐降低。最终缩孔判据(Shrinkage Porosity)预测的缩孔位置与未进行补浇的情况是一致的,即没有实现通过补浇增加冒口模数和减弱冒口下偏析的目的。
2 基于混沌映射的粒子群优化算法
混沌优化的关键在于如何将待控变量通过混沌映射进行处理. 将混沌理论融入PSO算法, 具体为: ① 通过混沌运动生成各粒子的位置, 从中选出所需种群, 以此保证粒子分布的均匀性, 同时提高粒子的质量; ②Gbest通过混沌映射产生混沌序列, 并将混沌序列随机代替原种群中的部分粒子, 以此提高种群多样性. PWLCM混沌映射方式如下:
(4)
式中:Zn表示混沌变量. PWLCM混沌具有随机性的运动状态, 如其它混沌系统一样, 其遍历特性使得混沌变量在一定范围内按照自身“规律”不重复遍历整个解空间, 图 1 为PWLCM混沌映射对单个Z0迭代500次得到的混沌向量, 很好地体现了其遍历性.
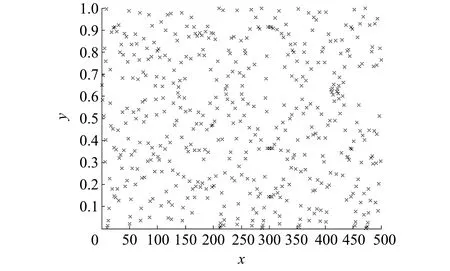
图 1 PWLCM混沌映射的遍历性Fig.1 The ergodicity of PWLCM chaotic maps
CPSO算法流程如下:
步骤 1 初始化粒子群基本参数, 包括学习因子、 惯性权重取值范围、 种群规模、 粒子维数、 最大迭代次数、 最小目标函数值以及速度和位置的取值范围.
步骤 2 混沌初始化
1) 利用随机函数产生一个D维且各分量值均在[0,1]之间的混沌矢量Z1=(Z11,Z12,…,Z1D), 以Z1为初始值通过映射式(4), 计算获取M(M>N)个矢量Z1,Z2,…,ZM.
2) 将混沌矢量Zi(i=1,2,…,M)的各分量按式(5)线性变换到解空间, 得到M个矢量x1,x2,…,xM.
xij=aj+(bj-aj)zij,
i=1,2,…,M;j=1,2,…,D,(5)
式中:bj,aj为优化变量上下限.

步骤 3 将个体的历史最优位置设为个体最优Pbest, 群体中历史最优位置设为全局最优Gbest.
步骤 4 判断是否满足循环条件, 若循环结束, 则输出全局最优位置Gbest; 否则, 各粒子按照式(1), 式(2)更新自身信息.
步骤 5 计算更新后各粒子目标函数值, 记为fitness, 若该粒子fitness的比其Pbest的fitness更小, 则将此位置设为Pbest; 若该粒子的fitness比Gbest的fitness更小, 则将此位置设为Gbest.
步骤 6 全局最优位置混沌化
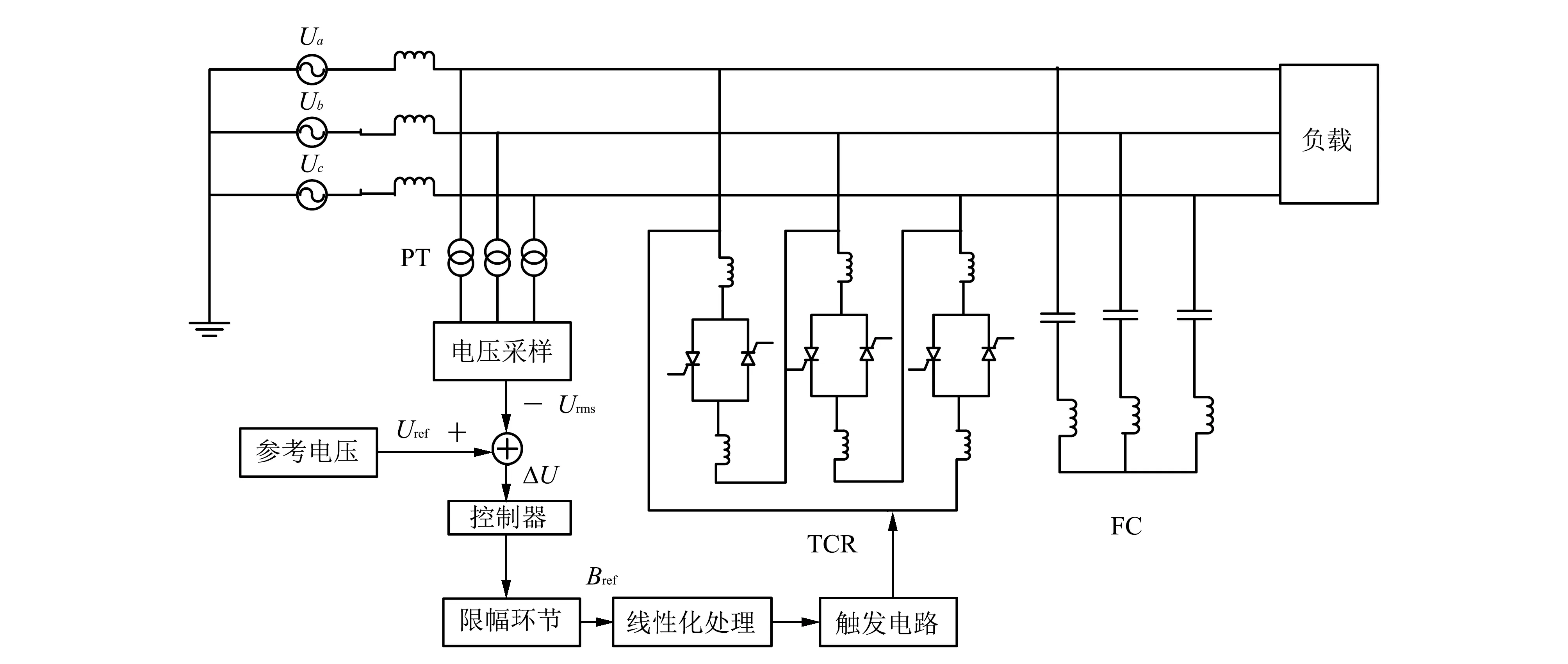
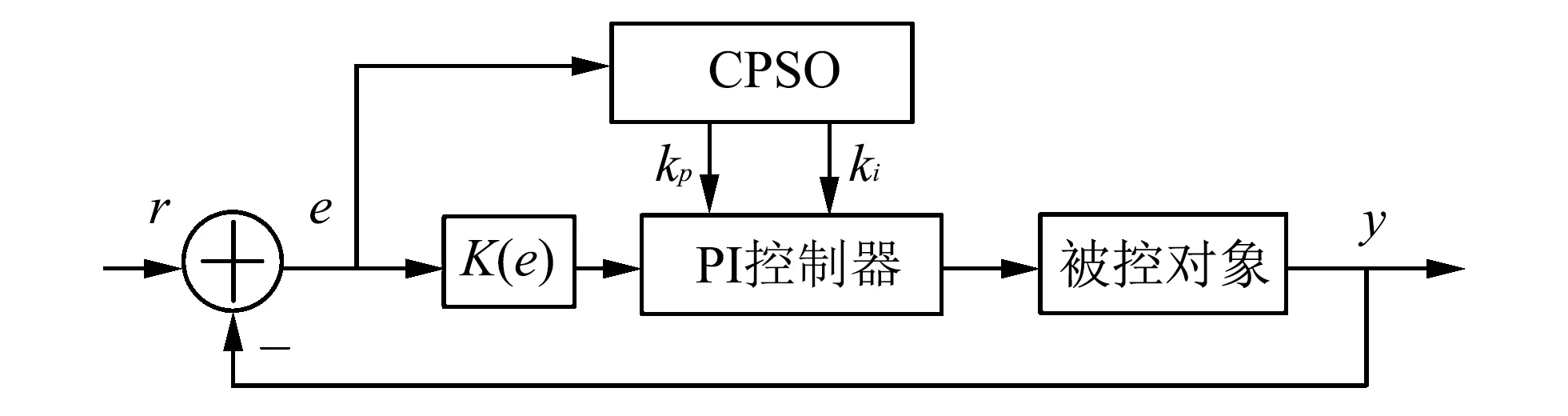
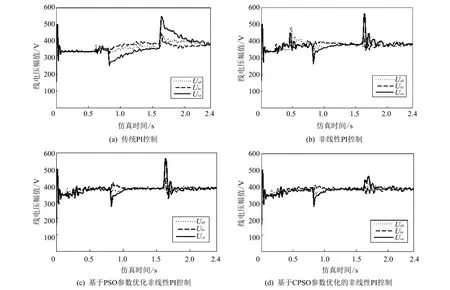
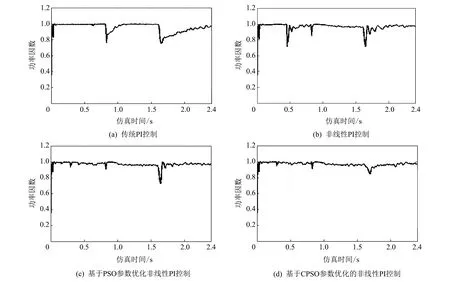
1) 对每一代全局最优位置xg=(xi1,xi2,…,xiD)混沌优化.xg通过式(6)转换得到Z1j=(Z11,Z12,…,Z1D),j=1,2,…,D, 并对Z1j各分量通过映射式(4)进行L-1(L (6) 2) 混沌矢量Z通过式(5)变换到待优化问题的可行空间, 生成可行解序列x=(x1,x2,…,xL). 3) 从种群中挑选L个粒子, 要求各粒子不相同且不是当前Gbest, 用可行解序列替换被选中粒子, 并计算可行解序列的fitness, 若小于当前Gbest的fitness, 则更新Gbest. 步骤 7 判断是否满足结束条件(当前迭代次数大于最大迭代次数或者Gbest的目标函数值小于最小目标函数值), 若不满足条件则跳至步骤4; 若满足则输出Gbest, 并结束程序. SVC应用于负载补偿时, 其作用是稳定负载电压, 补偿负载无功, 一个典型的SVC系统框图如图 2 所示. 图 2 中:Urms为SVC安装点处线电压,Uref为系统参考线电压设定值. 误差信号ΔU=Uref-Urms用于计算补偿电纳Bref. 触发电路环节根据触发角信号产生触发脉冲送至主电路, 主电路的电压随之发生改变, 改变后的电压再通过反馈环节送至控制器计算, 直到SVC接入点电压与参考电压达到一致为止, 以保持期望的功率因数. 图 2 SVC系统结构图Fig.2 Architecture diagram of SVC system 基于CPSO的SVC控制系统框图如图 3 所示, CPSO优化对象为PI控制器参数kp,ki. 为提高系统初期响应的快速性, 在此控制器采用基于非线性函数k(e)的PI控制器. 其非线性增益函数表现为 k(e)=1+4.5[1-sech(0.05e)],(7) 式中:e为给定值与实际值的误差. 图 3 基于CPSO的SVC控制系统框图Fig.3 Block diagram of SVC control system based on CPSO 为验证本文所提混沌粒子群优化算法, 利用matlab建立SVC系统仿真模型. 采用ITAE准则, 作为目标函数, 其函数形式为 式中:t表示仿真模型运行时间. 将待控系统负载状态分为三段: 第一段为平衡负载; 第二段为突加不平衡负载; 第三段为不平衡负载剔除. 目的在于验证系统负载突变情况下的无功补偿能力. 为达到更优的控制效果, 考虑到不平衡负载的特征, 拟将负载的不平衡负序电流基波分量作为切换信号, 当负载状态突变时, 系统自动选择不同参数的PI控制模块. 仿真验证过程中, 系统采用相电压为220 V, 设置线路寄生电抗为LS=0.649 mH. 平衡负载由三相RLC负载代替, 其参数设置为100 kW有功和86 kvar感性无功. 设定在0.8 s时突加缺失B相的负载, 其中有功50 kW, 感性无功70 kvar; 在1.6 s时将不平衡负载剔除. 传统PI控制器参数以及非线性PI控制器参数选择均为kp=0.000 55,ki=0.002. 为了比较优化效果, 采用基本PSO和本文所提CPSO算法求解该优化问题, 迭代过程中所用的目标函数、 SVC仿真模型、 初始化参数设置均一致, 其参数优化结果如表 1 所示. 表 1 基于PSO和CPSO的优化参数结果 针对三相线路电压的稳定性和系统功率因数的提高, 不同控制方式的控制结果如图 4, 图 5 所示. 图 4 三相线电压响应曲线图Fig.4 Three-phase voltage response curve 图 5 系统功率因数图Fig.5 System power factor diagram 由图 4, 图 5 及表 2 可以得出, 当第二段突加不平衡负载和第三段不平衡负载剔除后, 在CPSO参数优化的非线性PI控制作用下, 三相线电压在负荷过程中, 冲击电压明显减小, 功率因数提高显著, 且在允许范围内, 相比其他控制方式具有更好的性能. 表 2 控制效果比较 针对传统PSO算法存在早熟导致陷入局部最优解以及后期收敛速度过慢的问题, 提出了一种基于混沌理论的自适应粒子群优化算法. 该算法通过混沌初始化, 以加快收敛进程; 其次, 粒子根据自身状态调整惯性权重以增强搜索能力; 同时, 对每一代全局最优解进行混沌映射, 以增加种群的多样性. 基于该优化算法的电力网络无功补偿控制的仿真, 验证了该算法的有效性.3 基于CPSO的SVC控制方法
4 系统验证



5 结 论
