现代控制理论课程教学改革研究
2019-01-07潘俊涛张巍巍张白范亚静
潘俊涛 张巍巍 张白 范亚静

摘 要 现代控制理论是控制论的重要组成部分之一,现代控制理论课程是国内高校自动化相关专业的一门重要专业课程。立足民族院校办学特色,针对当前现代控制理论课程教学过程中存在的不足,依托学校现有的便携式倒立摆实验平台,提出一种基于便携式倒立摆的现代控制理论课程教学改革方案。改革方案将便携式倒立摆平台的控制系统设计流程与课程核心知识点进行紧密结合,不仅更进一步突出对学生综合运用知识能力的培养,而且建立了理论教学与工程实际间的桥梁,切合北方民族大学工程教育认证的发展规划。
关键词 便携式倒立摆;现代控制理论;自动化专业;实验平
台;教学改革
中图分类号:G642.0 文献标识码:B
文章编号:1671-489X(2019)15-0091-03
1 引言
制造业是国民经济的主体,是立国之本,兴国之器,强国之基。为适应新一轮的科技革命和产业变革,我国于2015年3月首次提出“中国制造2025”宏伟计划,并借此推动我国制造业由大变强,面向国际市场,提升中国制造的核心竞争力。为更好适应“中国制造2025”发展规划需求,国家对工程技术人才的培养也提出更高要求,特别是我国加入华盛顿协议以来,“中国工程教育专业认证”“新工科”建设等新兴教学理念在我国高等教育中生根发芽。越来越多的高等院校围绕工程教育认证主动修订其人才培养方案,培养国际通用、实践技术能力突出的工程技术人才。
自动控制作为“中国制造2025”的重要内容之一,对我国制造业的发展有着深远影响。所谓自动控制,是指在没有人直接参与的情况下,利用外加的设备或装置(控制器),使机器、设备或生产过程(被控对象)的某个工作状态或参数(被控量)自动地按照预定的规律运行[1]。目前,自动控制技术因其高效、准确等优势,已被广泛用于人民的生产生活过程中,在新能源发电、汽车制造、自然资源开发、農业生产、生态环境治理、医疗康复等现代科学技术领域,随处可见自动控制技术的身影。因此,自动化技术人才培养对实施“中国制造2025”发展规划起着举足轻重的作用。
如何在新形势下培养适应“中国制造2025”发展规划的自动化专业技术人才,是目前全国各高等院校自动化专业的重要课题。为此,全国许多高校积极响应教育部关于开展工程教育认证的工作要求,结合自身办学特色,陆续开展多种行之有效的自动化专业技术人才培养改革方案,如北京科技大学、西安理工大学、北京化工大学等。虽然各高校的自动化专业人才培养方案各有特色,但主框架不变,特别是自动控制理论类课程(即自动控制原理、现代控制理论),在各个高校的人才培养体系中均处于核心地位。此外,自动控制类课程也是各高校研究生入学考试的必考内容。由此可见自动控制类课程对自动化专业技术人才培养的重要性。
北方民族大学作为国家民族事务委员会直属高校之一,主要宗旨是为少数民族地区培养少数民族高素质专业人才,以期提升少数民族地区的经济水平和生活水平。根据我国现行的自动化专业人才培养规范,北方民族大学针对高年级的自动化专业学生开设了现代控制理论课程,以满足学生考研及就业的需求。现代控制理论是以线性代数为数学基础的工程控制理论课,课程知识包含大量烦琐的数学分析和定理证明,核心要点概念抽象,学习难度较其他专业课程大,特别是数学基础薄弱的少数民族学生,普遍感觉吃力。另一方面,课程理论性极强,虽有工程背景,但鲜有工程实际内容,教学过程中很难让学生建立课程知识与工程实际的联系,授课内容枯燥抽象,学生学习效果不尽如人意。
如何在现代控制理论课程教学中提升学生的学习效率,改善其学习积极性,高质量地完成大纲教学内容,是任课教师亟待解决的主要问题之一。倒立摆实验平台是自动控制算法研究领域广为采用的控制算法验证平台。工程实际中的许多控制问题,如双足机器人行走、火箭垂直发射、下肢瘫痪病人康复训练等,均可抽象为倒立摆的控制问题。因此,对其进行控制研究具有重大的实际意义。需要指出的是,倒立摆实验平台的控制设计流程与现代控制理论课程知识点有着非常紧密的联系。
有鉴于此,本文提出一种基于倒立摆的现代控制理论课程教学改革方案。改革方案将课程知识点分散到倒立摆实验平台控制设计的流程中,从而搭建理论知识与工程实际间的桥梁。此外,为了让学生积极参与倒立摆的控制设计,本文采用深圳某科技有限公司开发的便携式倒立摆实验平台,其便携性打破了传统实验设备地域限制,学生可以利用自己的笔记本计算机随时随地在该平台对设计的控制算法进行验证。实践教学表明,因为实际对象的介入,学生的学习兴趣有了显著提高,课程的学习效果也较以往得到明显增强。
2 课程改革实施方案
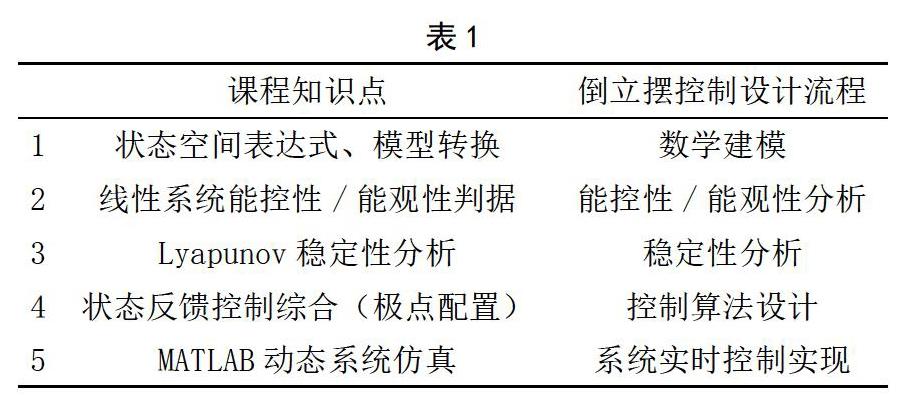
根据学校对工科类专业培养方案制订的工作要求,北方民族大学现行的现代控制理论课程为48学时,其中理论课40学时,实验课8学时。考虑到民族院校学生基础普遍不足,在保证教学大纲要求的情况下,首先对授课内容进行优化,略去烦琐的数学证明,强调对定理结果的理解及应用;同时加强MATLAB仿真软件在课程中的应用,相应地增加大量的上机作业,并以此引导学生从以往的“学知识”向“用知识”转变,强化学生综合运用知识的能力,高度切合目前我国高等教育对工科学生的教育要求。随后,将便携式倒立摆控制算法设计流程分散到课程各核心知识点的讲解中,将晦涩抽象的知识概念落到实处。具体对应关系如表1所示。
受限于篇幅,本文以线性系统的数学建模为例,讲解如何基于便携式倒立摆对课程内容进行改革。教材第一章“动态系统的状态空间描述”主要讲解一般控制系统的状态空间表达式。这是设计控制系统的第一步,对整个系统的控制算法设计起着至关重要的作用。然而,教材中关于系统状态空间描述的“数学”讲解十分晦涩难懂。
【定义1】动态系统的状态是完全地描述系统动态系统运动状况的信息,系统在某一时刻的运动状况可以用该时刻系统运动的一组信息表征,定义系统运动信息的集合为状态。
定义1是对动态系统状态的讲解,具有较强的数学性。其定义中“完全描述”“系统运动状况”等词汇,由于过于抽象,无法和实际对象进行联系,导致学生很难理解。为帮助学生理解,教学中会采用一些工程实例来讲解。但学生因为没有接触过这些实例,导致在理解的时候多有出入,学习效果并不理想。
为此,本文在该环节的讲授过程中引入便携式倒立摆,如图1所示。由于该实验设备的便携性,可将该设备带入课堂,现场演示控制系统的运行,让学生近距离熟悉认知该设备,并对系统的运动状态进行宏观分析,从而引出可表征系统运动状况的物理量(位置、速度、角度、角速度)。通过授课教师课堂提问引导,让学生主动思考系统状态中“完全描述”的现实含义,加深学生对晦涩知识概念的理念,也为后期实现倒立摆控制系统设计提供保障。
3 结语
为进一步切合学校对工程教育认证的发展规划,本文针对现有现代控制理论课程教学环节中存在的不足,提出一种基于便携式倒立摆的课程教学改革方案。改革方案在满足教学大纲规定要求的前提下,强化了学生对课程知识综合运用能力的培养,通过便携式倒立摆建立课本知识与工程实际间的联系,积极引导学生从被动学习向主动学习转变,教学质量得到有效提升。
参考文献
[1]肖小庆,周磊.现代控制理论课程工程化教学改革[J].高师理科学刊,2018,38(1):82-84.
[2]丁肇红.“现代控制理论”课程教学改革与研究[J].科教导刊,2018(8):109-110.
[3]王从庆,丁勇.现代控制理论课程教学改革的实践与探讨[J].南京航空航天大学学报:社会科学版,2004(1):72-75.
[4]丁李,孔政敏,杜富滢.“现代控制理论”教学改革与实践探索[J].教育现代化,2017,4(22):42-44.
[5]张素君,王超,宁欣.现代控制理论课程教学改革初探[J].中国现代教育装备,2016(15):39-41.
[6]任彦,刘慧博.面向“新型工程师”培养的现代控制理论课程改革与实践[J].中国现代教育装备,2016(19):39-42.
[7]朱永红,李蔓华,王建宏,等.基于MATLAB研究生“现代控制理论”课程教学模式改革与实践[J].景德鎮学院学报,2014,29(6):13-15.
