分布式精密编队卫星相对位姿测量技术综述
2019-01-07郭崇滨夏喜旺斯朝铭刘沛龙
郭崇滨 夏喜旺 斯朝铭 刘沛龙 杜 阳
1.上海微小卫星工程中心,上海 201203 2.中国科学院微小卫星创新研究院,上海 201203 3.中国科学院大学,北京 100049
空间任务需求的牵引使航天器对有效载荷的应用要求不断提高。然而其包络尺寸、口径、焦距等参数还是受到较大的约束。在此背景下小卫星分布式编队技术应运而生。根据编队卫星之间在动力学方面关系的紧密程度,分布式编队飞行可划分为精密编队、知识编队和协作编队[3]。

表1 编队飞行分类
精密编队在实现性能突破的同时,也要求编队卫星自身和星间有较高的位置、姿态精度[4]。因此,实现星间自主的高精度相对测量和控制成为分布式卫星精密编队技术领域的研究热点。本文对分布式精密编队卫星研究现状进行了综述,对编队卫星之间相对测量方法进行了分析和总结,并讨论了星间相对测量技术的发展前景。
1 分布式精密编队卫星研究现状
1.1 国外分布式精密编队卫星研究现状
1.1.1 PRISMA
瑞典于2010年发射的PRISMA是欧洲较早的精密编队项目,包括Mango(95 kg)和Tango(50 kg)两颗微小卫星,在约725 km的太阳同步轨道上同轨串行飞行,用于验证至m级距离内dm级控制精度的自主编队、停靠、交会和逼近等技术[5]。双星分别搭载了CNES研发的用于卫星编队的射频测量系统(Formation Flying Radio Frequency, FFRF),并采用相对GPS系统作为星间备份测量系统[6]。

图1 FFRF相对位置和姿态测量原理
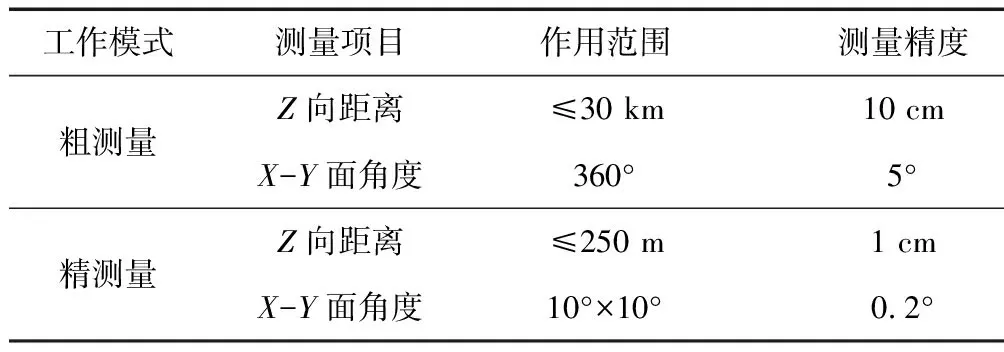
表2 PRISMA中FFRF测量系统性能指标
1.1.2 XEUS卫星
欧空局2008年提出的X射线反演宇宙空间光谱项目(X-ray Evolving Universe Spectroscopy, XEUS)计划由2颗间距约40 m、分别安装光学组件和探测器的卫星精密编队构成的一个长焦距X射线虚拟望远镜。XEUS引入了激光测量方法,将星间测量的精度从cm级提高到了亚μm级,拓展了编队卫星的应用范围[7]。如图2所示,主卫星上每个激光探头通过指向控制依次测的距离得到2颗卫星之间的相对位置和姿态信息,性能指标如表3所示。
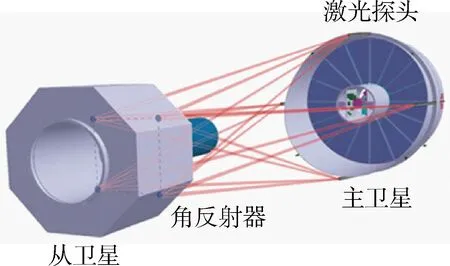
图2 XEUS测量原理图

表3 XEUS相对测量系统性能指标
1.1.3 GRACE & GRACE-FO卫星
NASA在2002年发射的重力恢复与气候试验项目(Gravity Recovery and Climate Experiment, GRACE)500km、星间距约100~150km的卫星。通过星上的双向K波段星间测距系统(K-band Ranging System, KBR)对星间距离进行精确测量。其距离与速率测量精度分别达到1μm和1μm/s[8]。
GRACE的成功促使NASA和德国地球科学研究中心在2018年5月又联合发射了GRACE-Follow On卫星来延续之前的任务。除KBR星间测距系统外,新一代GRACE-FO卫星搭载了激光测距仪,提高了各项测量精度[9]。
1.1.4 Proba-3卫星
欧空局计划于2020年发射的Proba-3任务包括1颗约340kg的追踪星(矮星)和1颗约200kg的目标星(日冕仪)。如图3所示,试验计划在远地点两星相距约100~150m时进行精密编队,目标星遮挡太阳营造出人造日食的景象,追踪星收集相关数据。
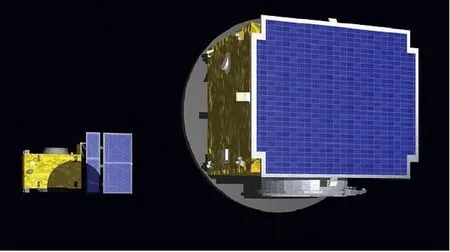
图3 Proba-3双星工作示意图
为了实现亚mm级星间控制,Proba-3采用的星间测量链路包括GPS纵向相对位置测量、星间相对切向粗测量(Coarse Lateral Sensor,CLS)以及星间相对切向与纵向精测量(Fine Lateral and Longitudinal Sensor,FLLS)3个环节[10]。
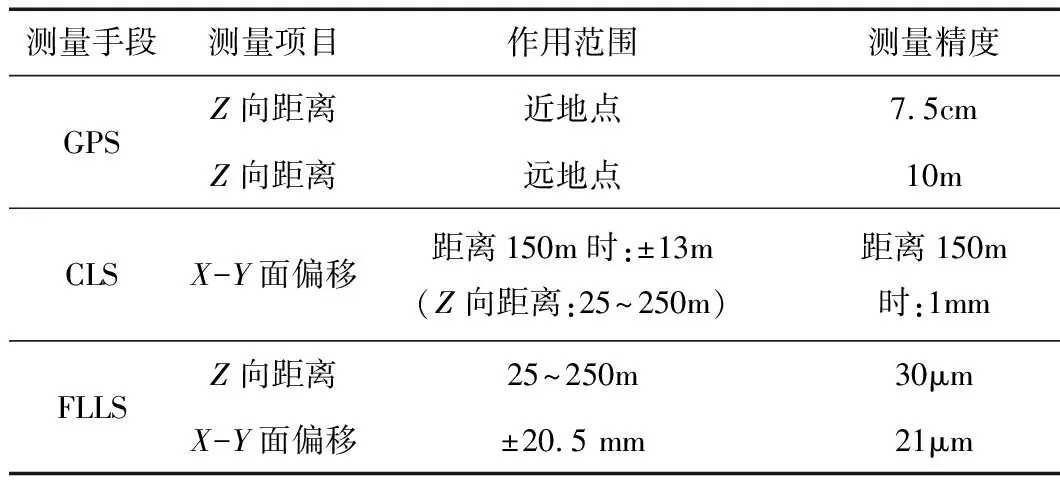
表4 Proba-3相对测量系统性能指标
1.1.5 Terra SAR-X / Tan DEM-X卫星
德国航空航天中心分别于2007年和2010年发射的Terra SAR-X与Tan DEM-X两颗相类似的约1350kg卫星,在约514km的圆轨道上,通过双星精密编队进行合成孔径雷达SAR成像,用于地面数字高程的高精度测量和ATI测速。
该项目仅使用了GPS伪距和双频载波相位观测方程构成的联合观测模型,并引入高精度动力学模型(100阶地球重力场模型)实现高精度的星间相对位置估计。其自主控制精度达到了10m(1σ)[11]。
1.1.6 Gemini卫星
德国空间操作处理中心等单位发起的Gemini任务由2颗质量80~100kg、轨道高度500~700km的卫星组成,主要用于在轨演示验证基于激光测量的星间跟踪技术和闭环编队控制策略以及自主轨道控制技术。
Gemini用于相对测量的设备主要包括激光干涉计、脉冲激光雷达以及GPS接收机。如表5所示,卫星根据不同的作用距离和控制要求选择编队结构和测量方式[12]。

表5 Gemini任务测量精度
1.1.7 CANYVAL-X项目
CANYVAL-X是由NASA、韩国延世大学及韩国航空航天研究所在2016年合作开展的项目。该项目包含2颗绰号分别为Tom和Jerry的立方星来验证虚拟望远镜技术。
该项目主要利用可见光视觉测量技术,如图4所示。 Jerry安装了激光二级管,Tom安装了对准识别激光信标的视觉相机,它利用图像投影来确定星间相对位置和姿态,能够实现的姿态测量和控制精度约1°,位置测量精度约dm级,控制精度约m级[13]。
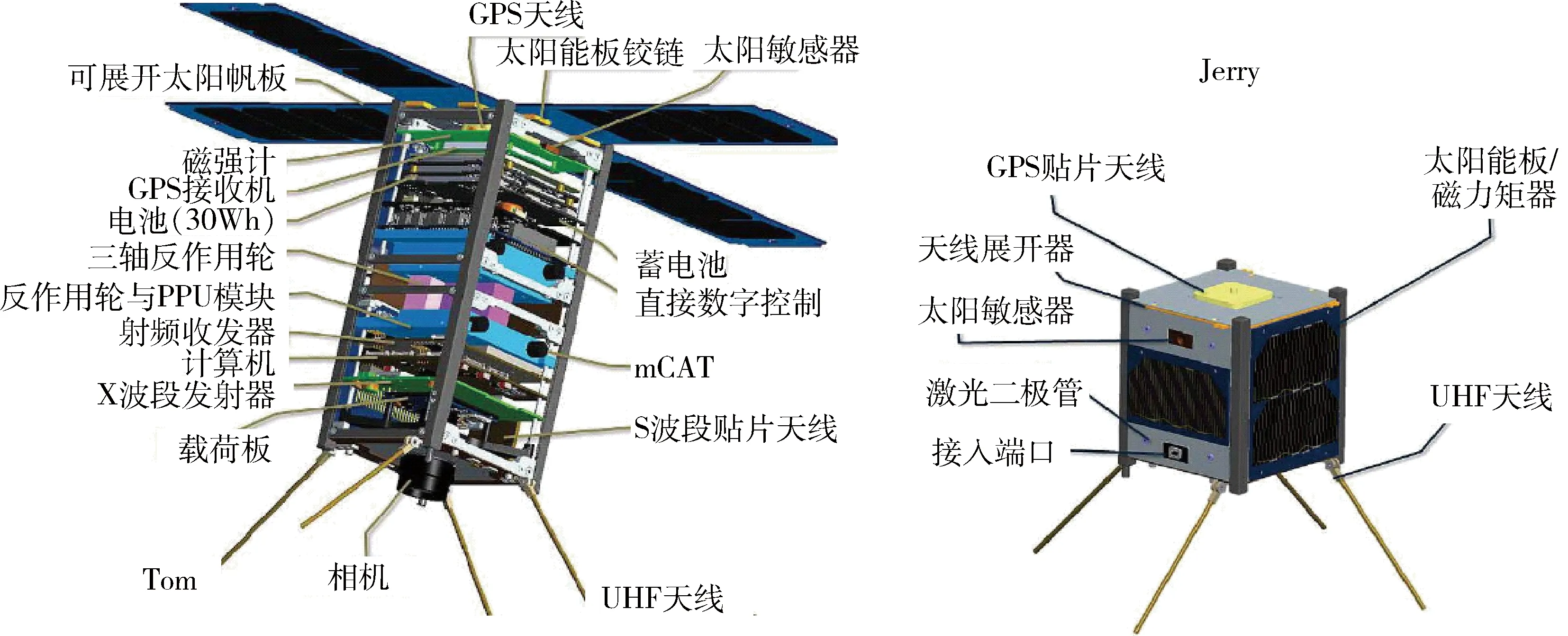
图4 CANYVAL-X卫星示意图
1.2 国内分布式精密编队卫星研究现状
针对分布式精密编队卫星技术,国内也进行了深入的理论和工程研究。哈尔滨工业大学改进的传统应答机、华中科技大学提出的基于载波的高精度自主相对测距技术、南京航天航空大学提出的利用类GPS技术实现编队卫星间的自主测量等,在测量设备及测量技术方面均取得了一定成果[14]。此外,中国科学院、国防科技大学等研究机构也为编队卫星相对测量技术提供了研究基础。但由于我国在相关领域的研究起步较晚,在在轨验证方面与发达国家发展水平相比,还存在一定的差距。
2 星间相对测量方法特征分析
2.1 GPS相对测量技术
当2颗编队卫星均安装GPS接收机时,可通过星间通信链共享2颗卫星接收到的GPS信号,从而完成2星相对位置的测量计算。具体算法可分为相对位置差分、相对伪距差分和相对载波相位差分[15]等。
GPS相对位置差分技术是将双星GPS接收机处理后的定位结果进行差分,得到相对位置关系,适用于星间大于100km的情况,其定位精度能达到10m;GPS相对伪距差分是对双星伪距测量量进行差分,得到相对伪距。适用于编队双星距离小于100km的情况,测量精度可达到1m;GPS相对载波相位差分是对2个卫星GPS接收机得到的GPS载波相位测量量进行差分,适用于编队卫星小于50 km的情况,精度能够达到5 cm[16]。
该技术的优点是质量、功耗小,成熟度高,已成功在GRACE、PRISMA等型号中得到验证。但相对GPS测量技术只能用于低、中轨卫星编队或转移轨道的近地点附近。
2.2 射频测量技术
射频测量技术的原理与GPS测距原理类似,基本思想是在每个编队飞行器上安装接收机,每个接收机上可安装多个发射天线和接收天线,通过测码伪距观测及测相伪距载波观测得到相对距离。
利用射频技术实现星间相对测量的主要步骤包括2步:
1)采用伪码测距和双向测距。如图5所示,在A星和B星上分别安装一副发射/接收天线,通过伪码和相位测量得到星间的相对距离;

图5 无线电实现高精度星间基线测量的原理图
2)采用比相法实现星间方位、俯仰姿态信息测量。A星上安装的4台接收机构成测角仪,采用比相法,得到B星与A星间的基线指向。理论分析表明,利用L波段的无线电波方案测距和测角精度可分别达到cm级和0.1°[17]。
射频测量方法又称类GPS测量技术,已成功在PRISMA卫星上搭载验证,技术相对成熟。在精测量模式下,能够达到cm级的测距精度,同时可为测量范围较小但精度较高的光学测量传感器提供初始化条件。射频测量系统不依赖于外界信号,可以在任意轨道上使用。
2.3 激光测量技术
激光测量按机理可以分为脉冲式和连续波相位式,脉冲式通过测量光脉冲的传播时延得到星间距离;连续波相位式则是通过观测连续光波在星间往返传播过程中的相位变化得到星间距离,在此基础上通过多个高精度距离向量计算出相对姿态[18]。
典型的激光相对测量系统由激光发射、接收、伺服机构和系统控制处理单元等组成,如图6所示。该系统采用CCD、带通滤光片、实时图像处理单元和伺服执行机构完成目标捕获。目标捕获后采用四象限探测器QD对目标进行高精度的瞄准。CCD光学天线辅助无线电探测系统对目标进行捕获、粗定位,同时配合角度编码及光电探测单元完成目标的空间角度测量[19]。
该方案可获得的基线长度和角度(包括方位角和俯仰角)测量精度分别为mm量级和角秒级(优于5”)。
激光测距具有测量精度高、隐秘性好、功率大、抗干扰能力强和单色性好等优势,已成功运用于XEUS、LISA、Gemini等卫星任务。但是激光测量波束较窄的特点限制了多目标的同时测量功能,且需要其他测量系统进行引导。选用多种测量系统相配合的模式开展星间测量工作成为发挥激光测量最大优势的热点方案。
2.4 红外测量技术
红外测角技术为被动探测方式,有调制盘编码、非调制盘编码、单元扫描和多元并行扫描、线阵推扫和面阵凝视等多种方式。与主动雷达探测系统组合使用,可以较好地利用各自的特点,发挥各自的特长,提高探测概率和跟踪能力[20]。
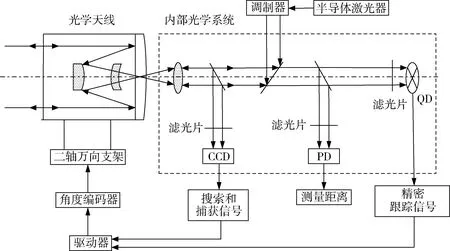
图6 星载激光雷达系统框图
典型的红外测角与主动激光雷达组合的测量系统如图7所示。该系统主要由中视场红外热像仪、长焦距红外测角仪、激光测距仪和摆镜跟瞄系统以及信息处理机组成。
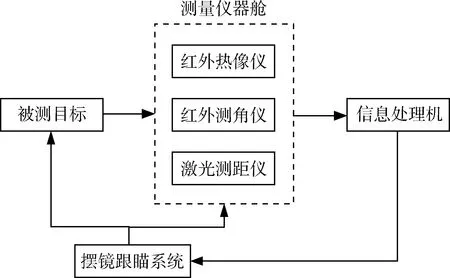
图7 红外+激光测量方案原理框图
该方案实现星间基线测量主要步骤为:1)采用红外跟踪系统对目标星进行俘获跟踪;2)采用长焦距红外相机目标方位角和俯仰角;3)采用测相激光测距仪进行精确测距;4)采用集成控制系统对各分系统进行控制,并对数据进行综合处理,构成星间基线测量系统。此方案的距离测量精度约为厘米级,方位测量精度为角秒量级。
红外测量系统结构简单、体积小、重量轻、分辨率高、隐蔽性好且抗干扰能力强,在美国DARPA实验室的Orbital Express卫星上得以成功运用。但受空间背景辐射和强光影响大,测量精度不稳定,且不能提供距离信息。总的来说,红外测量与主动探测系统组合使用能更好地发挥技术优势,提高联合探测的概率和跟踪能力。
2.5 可见光视觉测量技术
可见光视觉测量是一种无源探测技术。通常的测量技术手段即在目标卫星选定的4个或4个以上的特征点上安装光学信标,然后使用部署的光学相机对目标进行成像,将得到的图像与成像的几何关系、特征点安装的先验信息以及坐标系之间的转换关系相结合,就可得到卫星的相对位置和相对姿态。
以VISNAV为例介绍可见光测量原理。VISNAV ( Vision-based Navigation ) ,利用一个位置敏感二极管(Position Sensitive Diode,简称PSD)得到的电流测量数据计算包括传感器位置和方位在内共6个自由度的估计值。

图8 VISNAV传感器系统的相对导航原理
如图8所示,目标卫星上发出的多束光经测量卫星的光学透镜聚焦到PSD传感器上,再通过传感器的光电转换产生电流,电流的大小与光源与测量卫星之间的距离和方位有关。当星间距离小于10m时,相对定位精度为2mm,相对定姿精度为0.01°[21]。
可见光视觉测量方法具有敏感度高、光谱响应宽,线性度好和可靠性高的优点,在CANYVAL-X项目和上文提到的VISNAV传感器中,已灵活应用在卫星对接和卫星编队飞行的相对导航系统中。另一方面,该测量技术也有仅适用于近距离测量、测量精度稳定性低和受光照影响大的缺点。所以需要结合对空间合作目标与非合作不同的观测特点,合理规划视觉传感器。
3 总结
目前适用于卫星精密编队星间测量的方法主要包括GPS相对测量、射频测量、激光测量、红外测量和可见光视觉测量等。其中,GPS测量方法依赖于GPS信号,故只能在近地轨道使用,其它测量方法则不依赖外界信号,可应用于任意轨道。各测量技术的工作距离及测量精度如表6所示。
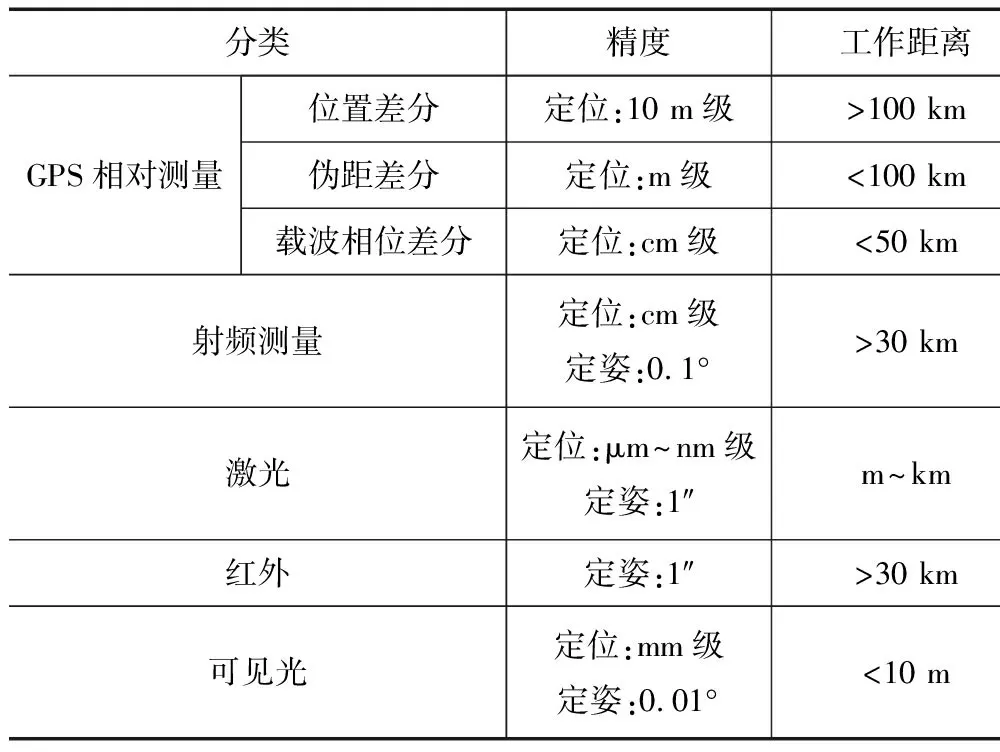
表6 星间相对测量技术总结
GPS测量方法技术成熟,可同时提供航天器位置、速度等信息,测量设备体积小重量轻。射频测量技术与GPS测量技术相像,作用距离远,测量覆盖率高,实时性强,可用于多航天器相对测量,但测量精度不足。激光测量技术测量精度高,保密性好,抗干扰能力强,但其波束窄,需其它测量系统进行引导。红外测量技术和可见光视觉测量技术分辨率高,却易受空间辐射及强光等干扰;红外测量技术隐蔽性好,但仅能提供角度信息;可见光测量技术工作距离小,适用于航天器的交会对接和近距离编队卫星的相对导航。
总体而论,在分布式卫星精密编队方面,低轨近距离卫星编队任务可采用GPS相对测量技术或射频测量技术,中、高轨近距离卫星编队任务需采用射频测量技术;在考虑空间交会任务时,交会末段还需应用可见光视觉测量技术和激光测量技术,红外测量技术可用作有益补充。
鉴于各测量手段优劣势明显,越来越多的实验开始使用多种手段组合测量的方式发挥最大优势,“无线电+激光”、“红外+激光”、“可见光+红外+激光”等各种组合测量手段也逐渐成为研究热点[22]。
4 结束语
在未来的精密编队卫星任务中,尽管针对不同的观测任务,其探测性能、编队形式、编队参数及指标要求均有差别,但相对位置和姿态测量技术具有一定的通用性,在未来相对位姿传感器的发展也会像现在卫星上GPS、星敏感器、陀螺、磁强计等传感器的组成一样,成为一个成熟的单机部件,可根据其具体的测量指标需求配置相对位置和姿态传感器。各种星间相对位姿测量技术的测量动态范围与测量精度成反比,即精度越高的测量技术其测量动态范围越低。卫星在编队建立过程中,可以结合GPS、射频、激光、红外以及可见光的方法分阶段进行相对位置实时测量与控制,使测量与控制精度从km级到cm级再到μm级递进,同时多个编队测量系统协同合作也提高了编队控制系统的鲁棒性[23]。
