实时三维声呐技术在平台水下检测中的应用
2019-01-07代兆立窦海余孙大权
代兆立,窦海余,徐 爽,孙大权,蔡 彪
1.中国石油冀东油田公司,河北唐山 063004
2.中国石油集团海洋工程有限公司,北京 100028
滩海人工岛处在复杂的海洋环境中,受到风、浪、流、海冰、风暴潮和地震等多种海洋环境因素的共同影响,损毁事件屡见不鲜,滩海人工岛工程的安全检测与预警是人工岛建设与运行的重要保障[1-2]。
冀东南堡油田采用人工岛海油陆采工程模式,1号构造相继建成3座人工岛,包括NP1-29平台、3座海底管道(简称海管)登陆平台(NP1-1D人工岛的2座海管登陆平台、NP1-2D人工岛的1座海管登陆平台)、NP1-3D人工岛海底管道栈桥支撑平台。由于近海风、浪、流、冰等动力因素的影响,平台桩基周边可能存在冲刷现象,严重时可能给安全生产带来威胁。工程设计及相关标准都提出了定期检测要求[3-4],检测内容包括水深与海底地形测绘、平台桩基探测、桩基冲刷、废弃电缆及海底障碍物等。
常规检测技术中有单波束、多波束、侧扫等手段。由于各平台水深较浅(1~3 m),平台由群桩组成,形状不规则,测量船舶难以抵近检测,多年来各平台桩基只能靠潜水员探摸作定性评估,无法进行定量检测。经过技术比选,本工程采用三维声呐扫测技术。三维声呐扫测设备可实时显示观看水下地形,也可采集点云数据,而后在后续处理中显示水下目标物的三维影像、水工建筑等影像资料。三维声呐有非常好的可视化效果,可360°呈现水下目标物的形状,距离相对分辨率达到4 cm,可输出扫测目标物的三维数据。三维声呐安装非常方便,可以安装在小艇、水下挖掘机、测量船、水下机器人[5]等上面,操作安全,有较高的安全系数。
本文介绍了三维声呐测量技术首次在冀东滩海油田进行了水下工程检测中的应用,检测结果满足了工程需要,可推广应用。
1 三维声呐测量技术简介
1.1 测量原理
三维成像声呐系统向目标区域发射声信号,利用声成像方法对接收到的回波信号进行处理,获得一系列二维图像(帧),通过计算机合成技术合成三维图像。对于一次三维成像可以获得两种类型的帧,分别是距离图像和振幅图像,对这两类声纳图像处理实现目标的三维成像。为了保证测量精度,通过惯性导航系统进行姿态修正,以消除船舶在航行时纵横摇摆的影响。
1.2 测量方法
测量使用水下三维声呐设备结合配套软件USE等进行系统配置和外业数据采集。使用船载TDL中继站接收控制点基准站发射的差分信号,接入到惯性导航系统中进行RTK改正,提供高精度的定位数据;通过GNSS输出时间数据(ZDA+1PPS),消除时间延迟误差;使用惯性导航系统中的姿态仪输出姿态和艏向数据实时改正船体姿态,消除波浪对船体姿态的影响;采用声速剖面仪采集测区中声速剖面数据,计算出测区平均声速进行声速改正,消除声速变化对水深测量产生的误差;通过USE等采集软件实现对云台和换能器的调节,根据测量目标位置与形态调整云台方向,实现换能器方向与目标对准,再根据接收到的图像实时调整换能器增益、阈值、量程等参数,使图像数据最优化。
1.3 系统校准
测量实施前,需对IMU测量单元进行对准校正,测量船舶开始进行绕8字航行,校准程序将自动进行,直至惯性导航系统校准精度指标满足系统预设要求即可。按照系统安装校准要求,在测试海域平坦区域选取两条平行测线进行距离约170 m的往返测量,考虑到实际水深为8 m左右,两条平行测线测量间距取17 m;另外选取在水下有棱角分明的结构体两侧分别进行平行测线往返测量。
(1)横摇(Roll)校准。在两条平行测线的相对位置选取影像,选取影像重叠区域达60%以上进行校准,校准使得profile line点基本在一条线上,校准结果score值为0.009 8<0.01,则校准结果满足测量需求。
(2)艏向(Yaw)校准。在同一测线相邻位置上选取有棱角的结构体影像,校准使得结构体相同区域完全重合,则校准结果满足测量需求。
(3)纵摇(Pitch)校准。在同一测线相邻位置选取影像,影像重叠区域达60%以上进行校准,校准使得profile line点基本在一条线上,校准结果score值为0.006 8<0.01,则校准结果满足测量需求。
(4)X校准。在不同测线相对位置上选取有棱角的结构体影像,校准使得结构体相同区域完全重合,则校准结果满足测量需求。
(5)Y校准。在不同测线相对位置上选取有棱角的结构体影像,校准使得结构体相同区域完全重合,则校准结果满足测量需求。
1.4 数据采集
合理调整换能器增益、阈值、量程等参数,获取干净的数据,再按照预定的测量方式,沿着测线进行数据采集。一段区域数据采集完成后,及时查看数据完整性,对于缺失部分进行补测。
1.5 内业汇编
(1)图像拼接及噪声处理。选择测量效果好的区域进行图像拼接,再进行噪声一级处理和二级处理。确保图像数据干净、可靠。
(2)测量成果分析。根据平台基桩扫测结果,认真研判扫测图像,判断桩基是否存在异常;确定海床和桩基冲刷、淤积等情况;确定废弃电缆及海底异常等情况。
2 工程应用
测试设备采用Echoscope实时三维声呐系统,见图1。三维成像声呐系统向目标区域发射声信号,利用声成像的方法对接收到的回波信号进行处理。Echoscope声呐系统工作时,通过声纳探头发射一个频率为375 kHz的声波信号,形成一个50°×50°的扇形扫描区域,每次声波发射包含128×128个波束,以相同的间隔排列,每个声波间距为0.39°;系统接收到回波信号后进行声成像处理,生成一个二维图像(帧);系统以20 Hz的速度更新数据,再通过计算机合成技术将这一系列的帧合成为三维图像。为了保证测量精度,通过惯性导航系统进行姿态修正,以消除船在航行时纵横摇摆的影响。

图1 Echoscope实时三维声呐系统
平面基准采用1954年北京坐标系,高斯-克吕格投影;投影参数中央子午线118°30′E,东向加常数50万m,北向加常数0 m。高程(深度)基准采用曹妃甸理论最低潮面。水位控制使用登陆点设计高程进行控制。
为满足人工岛周边水域测量要求,本项目建立了临时基准站。在NP1-1D、NP1-2D、NP1-3D登陆点分别布设临时潮位验潮点,使用登陆点设计高程进行人工验潮,精确至1 cm,每10 min量取一次并记录。验潮在每天测量前10 min开始,水深测量后10 min结束。
2.1 NP1-1D海管登陆平台水下检测
对NP1-1D海管登陆平台周围进行三维扫测,扫测角度为20°,声呐探头与特征物之间扫测距离约8.8 m,探头距离海底约7.9 m。
扫测结果表明,NP1-1D引桥东侧海管平台桩基周围3 m范围内有约50 cm的凹坑(见图2),水下桩基未发现异常。
2.2 NP1-2D海管登陆平台水下检测
对NP1-2D海管登陆平台周围进行三维扫测,扫测角度为30°,声呐探头与特征物之间扫测距离约13.9 m,探头距离海底深度约5.7 m。
扫测结果表明,NP1-2D西侧海管登陆平台未发现地形异常情况,未发现桩基异常(见图3);NP1-2D北侧(引桥边)海管登陆平台,因水深小于4 m,扫测数据噪点过多,无法形成有效影像。根据低潮时人工巡视及水深数据,认为海管桩基无异常,桩基下海床无沟槽和深坑。

图2 NP1-1D海管登陆平台桩基扫测地形
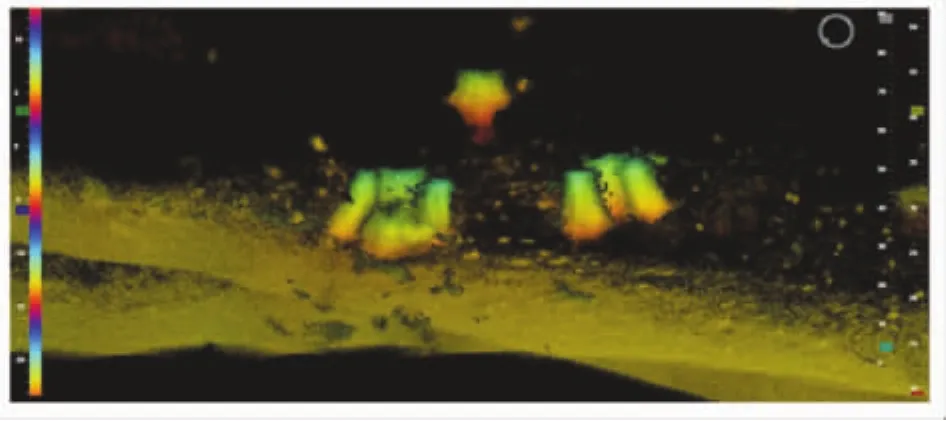
图3 NP1-2D西侧海管登陆平台桩基扫测地形
2.3 NP1-29平台水下检测
对NP1-29平台周围进行三维扫测,扫测角度为20°,水下桩基扫测高度约7 m。
扫测结果表明,西北侧桩基北侧有长44 m、宽约14 m、较周围地形深2.6 m的沟槽(见图4~6)。

图4 NP1-29平台西北侧沟槽位置
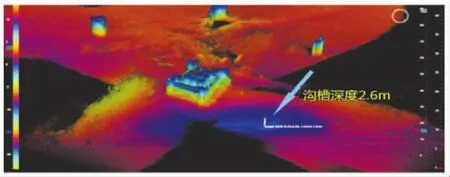
图5 NP1-29平台西北侧沟槽深度
2.4 NP1-3D海管栈桥支撑平台水下检测
对NP1-3D海管栈桥支撑平台周围进行三维扫测,扫测角度为20°,声呐探头与特征物之间扫测距离约7.2 m,探头距离海底深度约3.0 m。

图6 NP1-29平台沟槽区域剖面
扫测结果表明,NP1-3D海管栈桥支撑平台桩基宽度约11 m,桩基下方有较小沟槽(见图7),桩基底部呈三角形状。上部水深小于3 m,上部扫测时噪点较大,无法形成影像,根据低潮时对桩基的观察,桩基无破损等异常。

图7 NP1-3D海管栈桥支撑平台桩基扫测
3 结束语
介绍了水下三维声呐测量技术,采用Echoscope实时三维声呐系统对1号构造平台桩基进行了系统检测,首次在滩海区域对平台桩基地形地貌进行了三维定量测试,主要结论如下:
(1)对于水深大于3 m的平台,其桩基可采用Echoscope实时三维声呐系统进行水下检测;水深小于3 m时,需进行现场试验确定。
(2)冀东油田1号构造平台桩基未发现异常。NP1-1D引桥东侧海管平台桩基周围3 m范围内有约0.5 m的凹坑;NP1-29平台西北侧桩基北侧有长44 m、宽约14 m、较周围地形深2.6 m的沟槽;NP1-3D海管栈桥支撑平台桩基宽度约11 m,桩基下方有较小沟槽,桩基底部呈三角形状。
(3)检测成果满足工程要求,水下检测技术可推广应用。
(4)水下三维声呐检测应建立统一的技术标准,以满足水下工程检测要求。