基于操舵规律的船舶行为预测的搁浅率动态风险研究
2019-01-06尉浩然,郭志新,李梦霞
尉浩然,郭志新,李梦霞
摘 要:难航航段存在船舶操纵难度大的问题,本文针对此问题采用船舶模拟器中的大数据实验,进行难航航段操舵规律的提取,拟合出内河特定水域船舶的操舵规律。根据船舶操纵性指数、船舶初始数据建立了船舶模型,并根据外界环境建立航行环境模型,采用蒙特卡洛仿真计算船舶搁浅概率。该模型可以为船舶通航航道的搁浅概率进行预报,可为海事管理部门监管辖区水域通航安全水平提供重要的参考依据。
关键词:操舵规律;蒙特卡洛仿真;船舶行为;动态风险
中图分类号:U675.6 文献标识码:A 文章编号:1006—7973(2019)12-0074-02
船舶搁浅主要是受到航行水域水深的影响,在正常航道航行时,船舶不会出现搁浅情况,船舶驶离航道时,有可能出现船舶搁浅的概率。目前结合外界干扰因素,对船舶进行模拟试验已经是较为先进的研究方法了。李典庆等[1] 采用混合事件树方法进行船舶驾驶失效所引起的搁浅的模糊概率,解决了传统事件树不能处理的人为因素对搁浅概率的影响;陈婷婷等[2] 建立了船舶航行计划失效造成船舶搁浅的事件树,构造了船舶搁浅概率的灰色模糊隶属度函数,根据各基本事件的失效概率来分析航行计划失效造成船舶搁浅事故的灰色模糊概率分布情况;胡中凯等[3] 运用贝叶斯网络对事件之间的多态性和逻辑性进行了研究。 Mascaro[4]等人对比相关文献,提出一种基于贝叶斯网络的船舶航迹异常检测模型;Osekowka等[5]基于船舶AIS轨迹数据及水上交通信息,运用势场方法建立了水上交通异常检测模型;Lei[6]通过挖掘船舶历史航迹数据分析水域船舶运动模式,提出了基于实时轨迹数据的船舶异常活動检测算法。
综上所述,无论是模糊事件树、事件树、贝叶斯网络等研究方法都或多或少的存在主观因素,并且对船舶搁浅的研究局限于一个宏观层面。本文将基于操舵规律这一微观层面,采集操舵数据,建立船舶与环境模型,预测船舶行为,对船舶搁浅进行探究。采用蒙特卡洛仿真模型能够较好的避开主观因素的干扰,仿真结果能够较好的预测该航段船舶的搁浅概率。
1长江上的狭长水域
1.1航段介绍
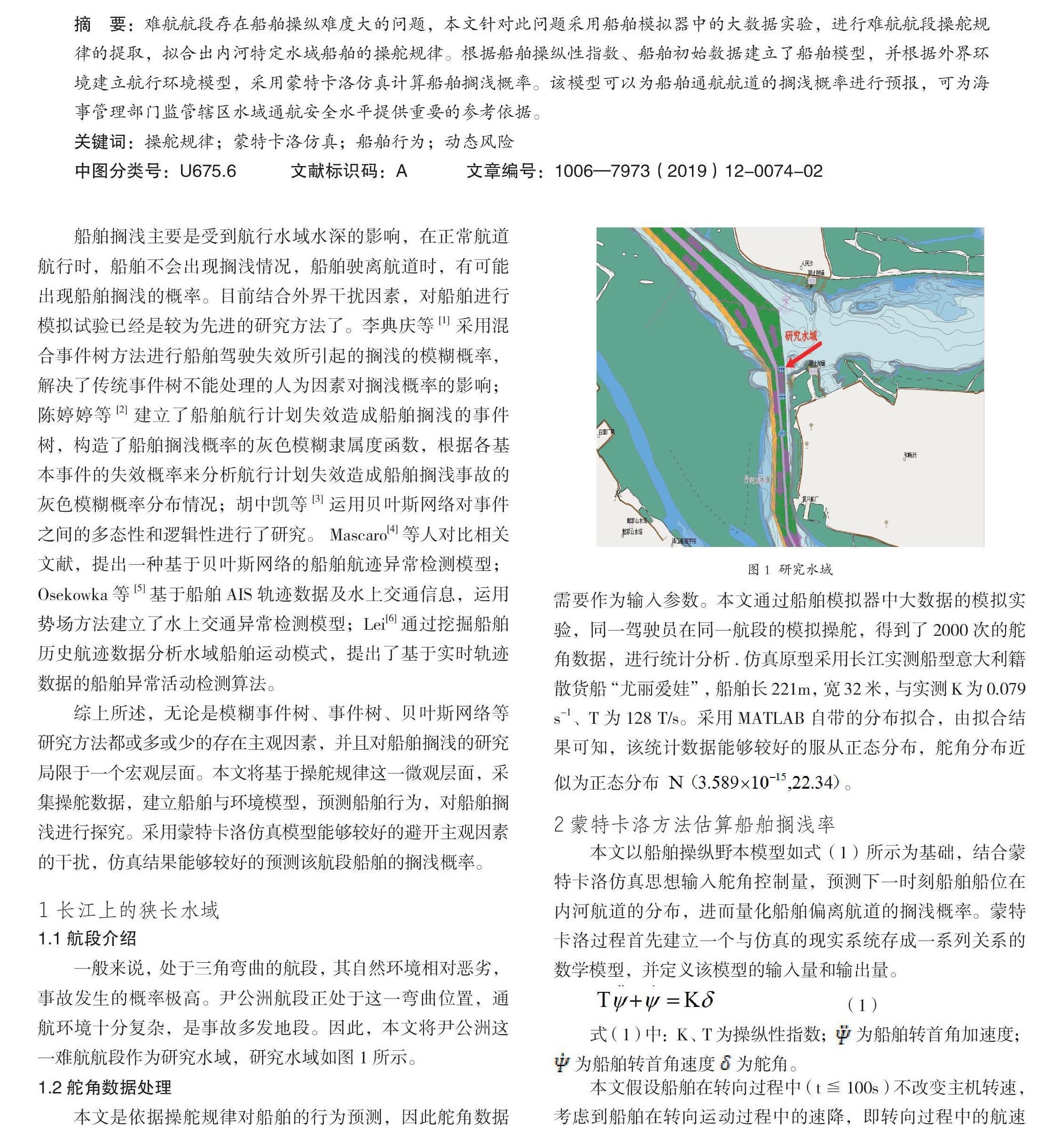
一般来说,处于三角弯曲的航段,其自然环境相对恶劣,事故发生的概率极高。尹公洲航段正处于这一弯曲位置,通航环境十分复杂,是事故多发地段。因此,本文将尹公洲这一难航航段作为研究水域,研究水域如图1所示。
1.2舵角数据处理
本文是依据操舵规律对船舶的行为预测,因此舵角数据需要作为输入参数。本文通过船舶模拟器中大数据的模拟实验,同一驾驶员在同一航段的模拟操舵,得到了2000次的舵角数据,进行统计分析.仿真原型采用长江实测船型意大利籍散货船“尤丽爱娃”,船舶长221m,宽32米,与实测K为0.079 s-1、T为128 T/s。采用MATLAB自带的分布拟合,由拟合结果可知,该统计数据能够较好的服从正态分布,舵角分布近似为正态分布 。
2蒙特卡洛方法估算船舶搁浅率
本文以船舶操纵野本模型如式(1)所示为基础,结合蒙特卡洛仿真思想输入舵角控制量,预测下一时刻船舶船位在内河航道的分布,进而量化船舶偏离航道的搁浅概率。蒙特卡洛过程首先建立一个与仿真的现实系统存成一系列关系的数学模型,并定义该模型的输入量和输出量。
(1)
式(1)中:K、T为操纵性指数; 为船舶转首角加速度; 为船舶转首角速度 为舵角。
本文假设船舶在转向过程中(t≦100s)不改变主机转速,考虑到船舶在转向运动过程中的速降,即转向过程中的航速小于初始航速,在多数情况下,用平均航速来代替,其范围为初始航速的85%-95%,本文取船舶在转向过程中(t≦100s)的航速。船舶操舵后的纵距X和横距Y可用式(2)求解,如式(2)所示,根据不同的舵角值输入,将会得到不同的船位。在这个仿真系统中根据舵角的分布规律,随机产生上万次随机舵角,依据随机舵角获得船位随机运行位置,最终根据频率计算概率。
3 操舵规律对船舶位置分布影响仿真模型
仿真框架分为船舶的初始化设置模块、船舶行为状态判断模块、输出与存储模块。
船舶的初始化设置模块用于输入船舶的一些基本参数来构建船舶模型的重要数据。输入实验航段的舵角分布规律作为“随机数”;船舶行为状态判断模块,主要是进行船舶行为的判断。采用MATLAB软件随机产生符合该航段操舵规律的舵角数据,将舵角数据输入船舶模型,在模型上显示船舶下一时刻船舶位置的显示。结合航道信息,计算下一时刻船舶分布于航道外的概率;输出与存储模块,将有效信息如船舶下一时刻的船舶位置预测分布与船舶的搁浅概率输出并进行储存,并将船舶的初始化设置模块的数据一并储存,形成一个完整的数据系统。
4仿真实验与分析
4.1试验参数设置
试验模拟是一小段时间间隔内(模拟时间间隔设为100s),根据船舶AIS数据情况下对船舶下一时刻船舶行为的预测模拟实验。实验中初始的航段操舵规律是通过船员使用模拟器进行大数据实验获得,不同船员的操舵规律是不一致的,会有一定的偏差。
本文忽略操舵延时及舵角变化率(即自正舵至舵角操舵时间为零),且假设t1 = 0时,转首角速度 = 0,即船舶初始为直航状态,基于式(1)求解船舶转首对操舵的响应,见式(3)
4.2实验结果输出及分析
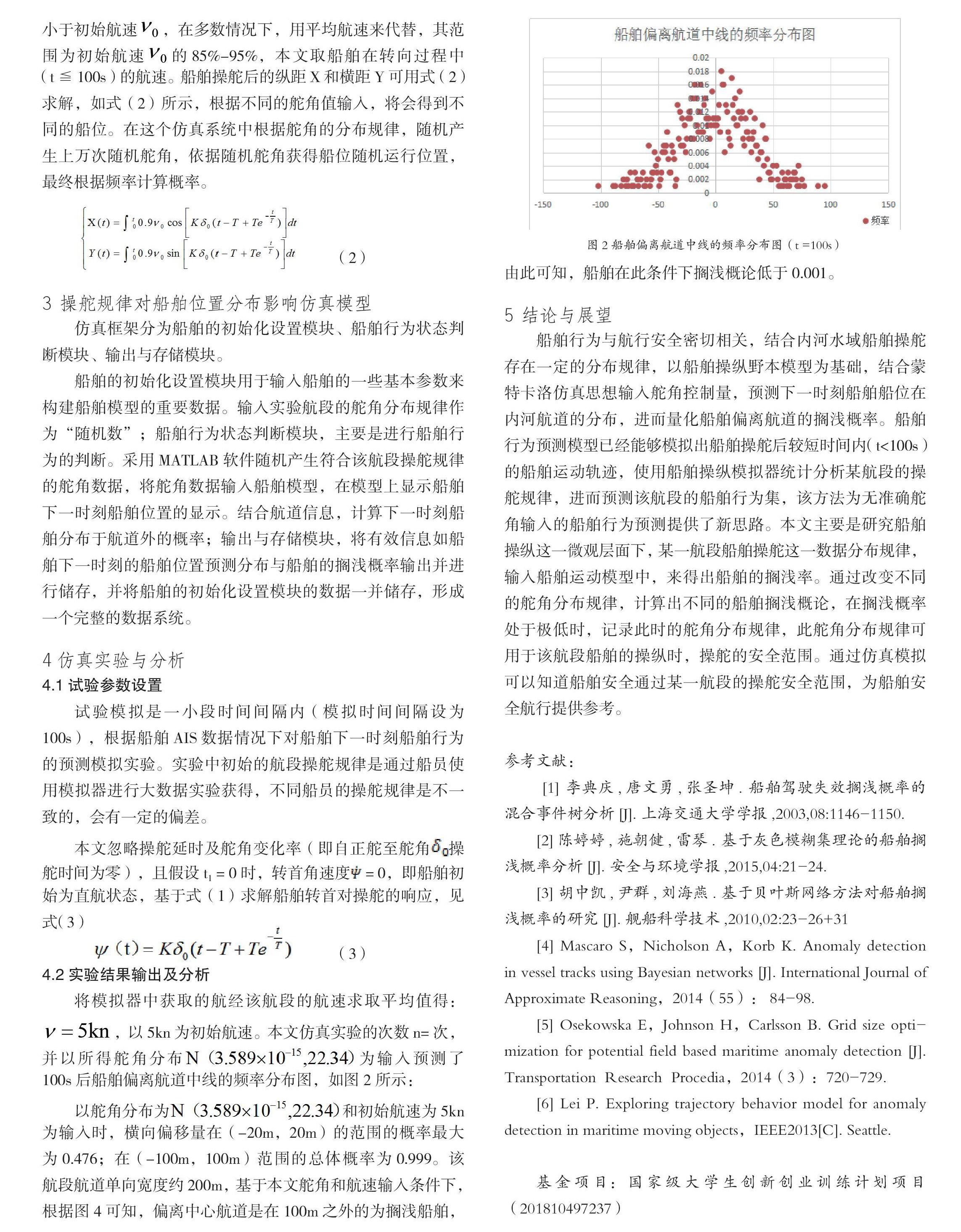
将模拟器中获取的航经该航段的航速求取平均值得:,以5kn为初始航速。本文仿真实验的次数n=次,并以所得舵角分布为输入预测了100s后船舶偏离航道中线的频率分布图,如图2所示:
以舵角分布为和初始航速为5kn为输入时,横向偏移量在(-20m,20m)的范围的概率最大为0.476;在(-100m,100m)范围的总体概率为0.999。该航段航道单向宽度约200m,基于本文舵角和航速输入条件下,根据图4可知,偏离中心航道是在100m之外的为搁浅船舶,由此可知,船舶在此条件下搁浅概论低于0.001。
5 结论与展望
船舶行为与航行安全密切相关,结合内河水域船舶操舵存在一定的分布规律,以船舶操纵野本模型为基础,结合蒙特卡洛仿真思想输入舵角控制量,预测下一时刻船舶船位在内河航道的分布,进而量化船舶偏离航道的搁浅概率。船舶行为预测模型已经能够模拟出船舶操舵后较短时间内(t<100s)的船舶运动轨迹,使用船舶操纵模拟器统计分析某航段的操舵规律,进而预测该航段的船舶行为集,该方法为无准确舵角输入的船舶行为预测提供了新思路。本文主要是研究船舶操纵这一微观层面下,某一航段船舶操舵这一数据分布规律,输入船舶运动模型中,来得出船舶的搁浅率。通过改变不同的舵角分布规律,计算出不同的船舶搁浅概论,在搁浅概率处于极低时,记录此时的舵角分布规律,此舵角分布规律可用于该航段船舶的操纵时,操舵的安全范围。通过仿真模拟可以知道船舶安全通过某一航段的操舵安全范围,为船舶安全航行提供参考。
参考文献:
[1] 李典庆,唐文勇,张圣坤. 船舶驾驶失效搁浅概率的混合事件树分析[J]. 上海交通大学学报,2003,08:1146-1150.
[2]陈婷婷,施朝健,雷琴. 基于灰色模糊集理论的船舶搁浅概率分析[J]. 安全与环境学报,2015,04:21-24.
[3] 胡中凯,尹群,刘海燕. 基于贝叶斯网络方法对船舶搁浅概率的研究[J]. 舰船科学技术,2010,02:23-26+31
[4] Mascaro S,Nicholson A,Korb K. Anomaly detection in vessel tracks using Bayesian networks [J]. International Journal of Approximate Reasoning,2014(55): 84-98.
[5] Osekowska E,Johnson H,Carlsson B. Grid size optimization for potential field based maritime anomaly detection [J]. Transportation Research Procedia,2014(3):720-729.
[6] Lei P. Exploring trajectory behavior model for anomaly detection in maritime moving objects,IEEE2013[C]. Seattle.
基金項目:国家级大学生创新创业训练计划项目(201810497237)
