大型发电机硅钢片的电磁码垛技术研究
2019-01-05程洪波
程洪波
(扬州中欧工业机器人有限公司, 江苏 扬州 225000)
引言
电磁码垛技术被广泛应用于现代工业,以提高自动化程度,解放劳动力,但多用于小型金属产品的码垛,码垛频率相对较低。随着目标产品的大型化和码垛频率的提高,传统电磁码垛机构已不能适应大型工件的高频次码垛需求。本文所研究的复式电磁码垛机构,是通过采用多个工位交替码垛的方式来降低码垛电磁吸盘的动作频率,以适应高速出料的需求,并在一定程度上延长电磁吸盘的寿命,提高效率。
1 复式电磁码垛工作原理
复式电磁码垛是一种利用电磁吸盘通过PLC控制的码放金属(导磁)工件的多工位码垛机构。图1所示,复式电磁码垛机构工作过程为通过电磁吸盘将工件将吸附至在磁性皮带下表面,皮带绕皮带梁旋转将工件送至码垛工位上方,通过检测开关检测工件来控制电磁吸盘的通断电进行抛料码垛,而码垛的方式为多个工位交替进行。
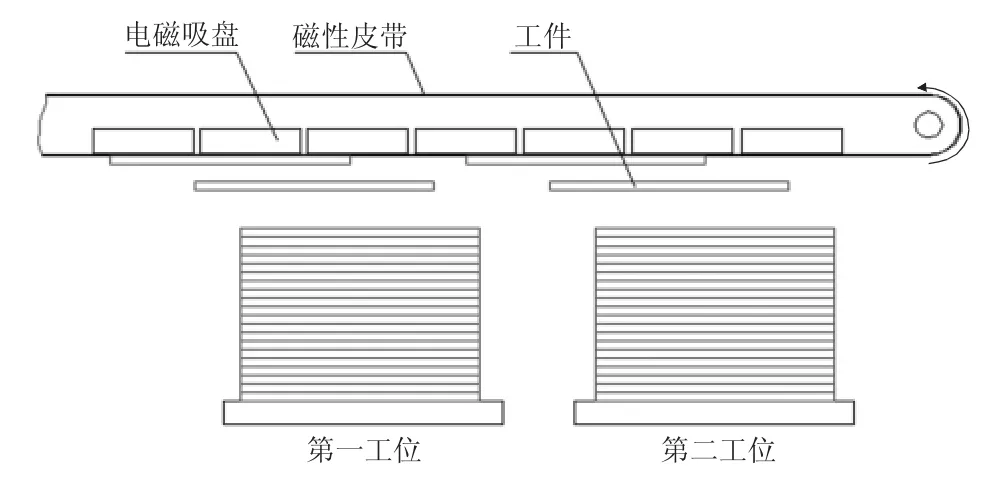
图1 复式电磁码垛工作原理
2 复式电磁码垛机构的优点
从整线的速度及卷料的长度综合考虑,该生产线采用了双工位电磁码垛技术,对传送带输送过来的工件进行依次码垛。由于采用了双工位交替码垛,较单工位码垛电磁吸盘的动作频率减小了一半,将码垛工件的数量提高了一倍,停机吊运的次数也降低了一半。这样有效地提高了码垛电磁吸盘的寿命,提高了生产效率。
3 复式电磁码垛机构解决的主要技术问题
3.1 大吸力、小体积永磁电磁吸盘
由于电磁吸盘的工作对象为0.35 mm厚的硅钢片,重量约1.8 kg的大面积扇形工件。要求电磁吸盘能在10 mm的距离将工件吸附至输送带下表面,而市场上现有相同吸力规格的电磁吸盘体积较大,不能满足输送带结构的需要。为解决大吸力、小体积电磁吸盘的问题,采用电控永磁吸盘,利用不同永磁材料的不同特性设计成最佳磁路,通过电控系统对内部磁路进行退磁控制。该吸盘为常态永磁电磁吸盘,通电时吸盘消磁抛料,而抛料所需时间很短,这样就减少了吸盘的通电时间增加了电磁吸盘的寿命。
3.2 电磁吸盘的矩阵布置
多工位电磁码垛,是一个工件进行交替码垛的过程,对应两工件的电磁吸盘的通电时间不一致,而各工位码垛又要互不影响,这就要求电磁吸盘分段布置,第一工位抛料后迅速恢复磁性不影响下一工件通过,避免误抛。设置抛料检测开关时,要根据皮带的速度设置合适的发讯位置。为了减少控制环节,提高系统抛料的可靠性。传送带采用能满足压力机最高工作频次要求的送料速度定速运行,使抛料距离恒定。结合理论计算通过试验的方法设定抛料的最佳位置。
3.3 长行程磁性皮带导向
由于结构需要,输送带的输送工件距离较长,皮带运转时下表面下垂严重,张紧困难。为了控制皮带下垂对工作的影响,在皮带两侧设置不锈钢托板(如图2所示),对皮带进行导向。皮带背面设置纵向背筋,一方面背筋高于不锈钢托板,工件吸附在背筋条上,使工件移动时工件与不锈钢托板属少磨察或无磨察状态;另一方面在每根皮带梁上侧设置张紧轮(如图3所示),张紧轮对应皮带背筋的位置开环形导向槽对皮带进行纵向的导向;同时背筋也可以增加皮带的强度及寿命。
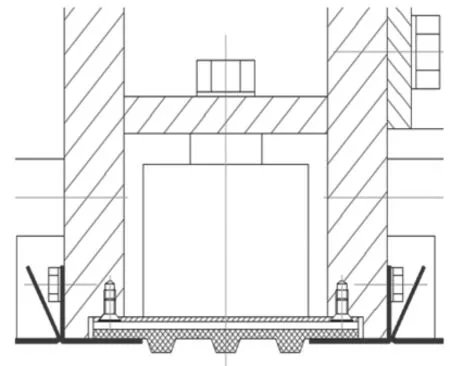
图2 皮带导向结构
3.4 磁性皮带高速回转的噪音控制
磁性皮带在绕高速回转时,需要采取有效的措施以控制噪音。驱动同步磁性皮带的同步带轮以及张紧轮采用具有自润滑特性的聚四氟乙烯材料;装配过程中严格控制各零部件的装配精度。
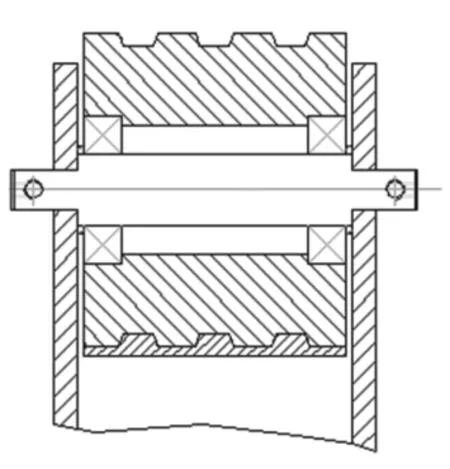
图3 皮带张紧轮
4 结语
复式电磁码垛机构是通过采用多个工位交替码垛的方式来降低码垛电磁吸盘的动作频率以适应高速出料的需求,在一定程度上能延长电磁吸盘的寿命,提高效率。
