基于有限元法的感应电机涡流场分析
2019-01-05勾建磊
胡 炼, 勾建磊, 王 振
(国网山东电力公司济南供电公司, 山东 济南 250012)
引言
电机是依据电磁感应定律实现机电能量转换的装置,广泛应用于各个领域。感应电机是一种基本的交流电机,相比于其他交流电机,具有构造简单、运行稳定、制造容易、价格低廉、坚固耐用,工作效率高和工作特性良好的明显优势[1]。在设计电动感应电机的过程中,要根据其使用环境及技术要求,慎重选择该类电机的转子类型。
感应电机的分析方法主要有:等效磁路法、磁场解析法以及以电磁场数值计算法。作为一种电磁场数值计算方法,有限元法具有通用性好、求解精度高、并与计算机发展相适应等优势。在异步电机的动态分析中,通过分析电机的电磁场分布与变化可以及时了解电机内部的电磁特点,因而在异步电机电磁计算中有限元法应用普遍,是电机分析不可或缺的模块[2-4]。
应用电磁场有限元数值计算法求解电机电磁问题,可以准确分析、模拟和推测电机的设计、生产和试验等过程中出现的一些问题,是现代电机设计制造的重要依据,并可以改善和提高电机的生产水平,减小资源压力方面都具有良好的前景。
1 感应电机的概述
三相异步电动机又可称之为三相感应电动机,感应电动机是一种依靠气隙处的旋转磁场和转子绕组中感应电流两者之间相互作用从而产生了电磁转矩,实现电能向机械能转换的交流式电动机。考虑到电动机转子绕组的电流是感生的,所以我们称之为感应式电动机。感应电动机与其它类型的电动机相比较而言,具有在电机的结构组成简易、生产制造方便、出厂成本低廉、实际生产维护简单和电机的可靠性更高等优势。
1.1 感应电动机的基本结构组成
固定的定子和转子是三相感应电动机两个最基本的组成成分。三相感应电动的定子部分由定子的铁心、机座以及定子绕组等构成,其中定子的铁心是构成电动机磁路的一部分,铁芯由厚度为0.5 mm的硅钢片进行叠压而成,再利用压圈和扣片进行紧固,并且各个硅钢片之间是相互绝缘的,这样大大降低了铁芯处的涡流损耗。其中的定子绕组一般由带绝缘的铝制导线或者铜制导线绕制而成,小型的感应电动机一般采用是散下线圈,也可称为软绕组,大中型的感应电动机采用的是成型线圈,也可称之为硬绕组。感应电机的转子部分由转子的铁心、转子绕组、转子支架、转轴以及风扇等部分构成,其中转子的铁心和定子的铁心的组成成分完全一样,都是由厚度为0.5 mm的硅钢片进行叠压而成。
1.2 感应电动机的工作原理
如下页图1所示,当感应电动机的定子绕组与三相对称电源相连接时,在电动机的定子绕组中会流入三相对称的电流,在电动机的气隙处会生成一个以同步转速大小为n1进行旋转的磁场;假设旋转的定子磁场的转向取为逆时针,当旋转的定子磁场磁力线对电动机的转子导体进行切割时,这时将会在电动机转子导体的内部生成一个大小为E2的感应电动势,该感应电动势的方向可以由右手定则进行确定。可见磁场的N极下的感应电动势方向垂直纸面向里,磁场的S极下的感应电动势方向便垂直纸面朝外,电动机转子电流的有功分量I2a与感应电动势E2的相位完全相同,因此感应电动势的方向也可以表示出转子电流有功分量的方向指向。感应电机转子电流的有功分量和电机气隙处的旋转定子磁场两者之间相互作用所生成的电磁力设为fem,按照左手定则,那么在磁场的N极下的全部电流的方向都是垂直纸面向里的导体和在磁场S极下全部电流的方向都是垂直纸面朝外的导体都可以生成方向为逆时针的切向电磁力;fem,在电磁力fem的作用下,使得感应电机的转子受到方向为逆时针的电磁转矩Mem的作用,那么感应电机的转子将朝着与旋转的定子磁场方向相同的方向一起旋转。驱动感应电机转子运动的电磁转矩Mem和感应电机的转子轴两端之间的拖动作用所产生的机械性制动转矩之间相互平衡,感应电机的转子将按照恒定的转速n拖动所连接的机械设备可靠稳定地运行,上述就是电能向机械能转换的全部过程,这也就是三相感应电动机的基本工作原理。

图1 工作原理图
2 笼型感应电机的尺寸
Y132M-4型三相感应电动机是全封闭自扇冷式鼠笼型三相异步电动机,该电动机基本系列符合IEC标准的有关规定。Y132M-4型三相感应电动机具有高效、节能、起动转矩大、噪声低、震动小、可靠性高和使用维护方便等特点。
通过查阅Y系列三相异步电动机设计手册,得到Y132M-4型感应电动机技术参数如表1所示。Y132M-4型感应电动机定子、定子槽、转子及转子槽的具体尺寸,如图2与图3所示。
3 有限元网格剖分
有限元计算的本质在于可以将连续的场域问题转变为离散的场域问题进行求解,而在这个由连续场域向离散场域转变过程的核心在于有限元模型的网格划分。
进行有限元计算的主要过程体现在:首先确定出能和边值问题相对应的泛函数及可以相互等价的变分问题。进行有限元网格划分,将连续的场域离散成离散场域;在有限单元上利用一个已知的函数,例如线性的或者二次的,将有限单元上的未知连续函数近似的表示出来;求解泛函数的极值,得到一系列的方程组,进行方程组的求解,求解结束后将计算的结果进行显示,如果需要其它的一些场量时需要进行后处理等。
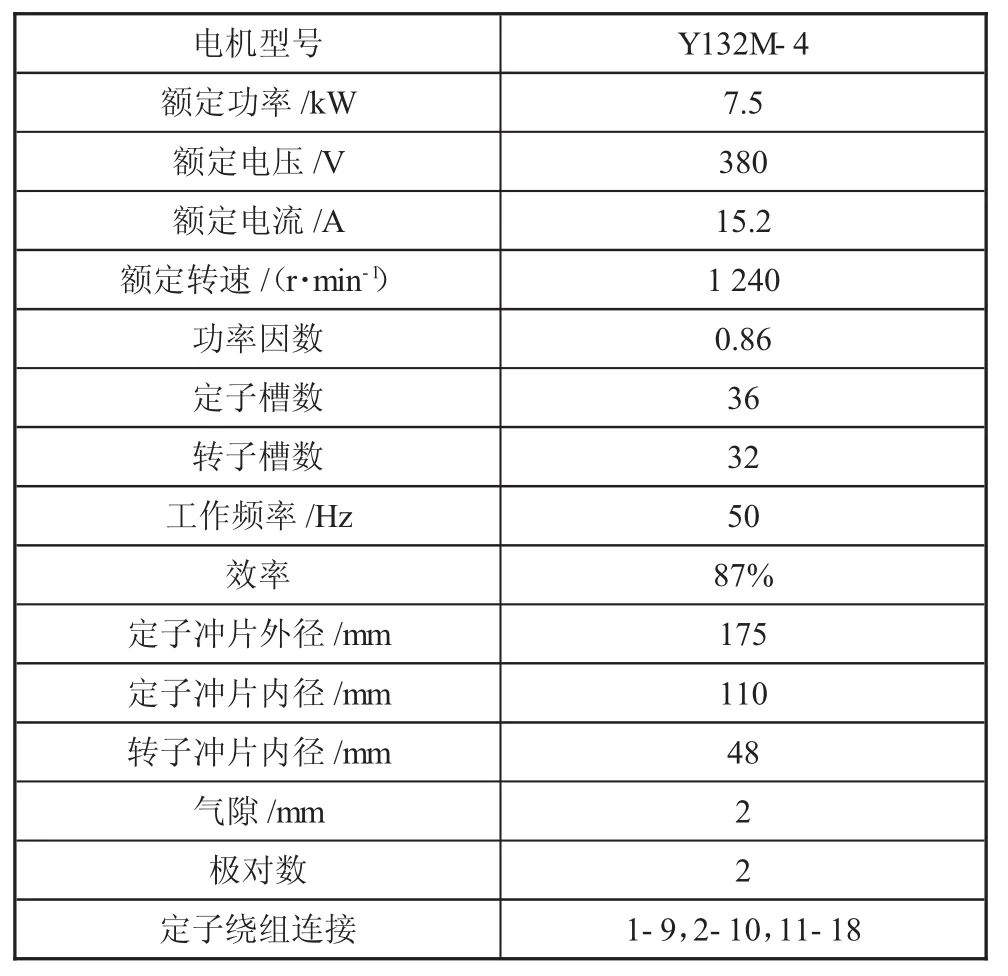
表1 Y132M-4型感应电动机技术参数

图2 Y132M-4型感应电动机定子及定子槽尺寸(mm)

图3 Y132M-4型感应电动机转子及转子槽尺寸(mm)
一般在进行电机平面场求解时,网格划分的形状有三角形、四边形以及规则矩形等。采用三角形网格划分时,由于对各个三角形单元的形状及大小都没有特殊的要求,使用的灵活性很好,也可以合理地设置单元网格的疏密度,对复杂场域的边界适应性也很好。因此三角形单元网格划分在二维有限元计算分析中的应用很广泛,三角形单元的形状如图4所示:
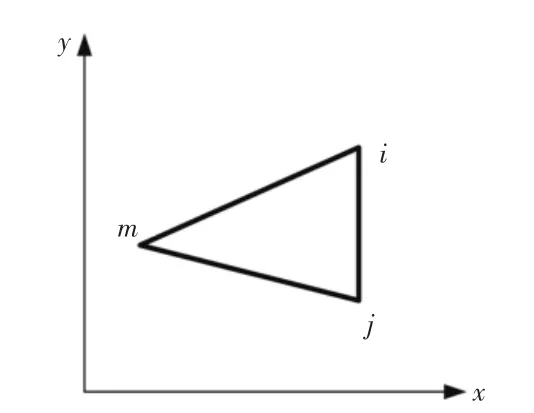
图4 三角形单元
为了在较快的时间内获得准确的计算结果,在一些可能场量变化比较大区域的三角形边长要小一点,其他场量变化不大的区域可以适当地大一点。三角形单元的边长应该从小到大慢慢逐步过渡,求解区域网格剖分结束之后,单元和节点的编号对计算的结果没有任何影响。
4 利用Maxwell2D对感应电机的涡流场分析
4.1 建立几何模型
在搭建一个定子槽和槽绕组后,选定该组定子槽和绕组,按照Edit/Duplicate/Around Axis的顺序执行操作指令,改组指令实现的是对已建立的定子槽和槽绕组沿着旋转轴进行复制操作,在Axis中以Z轴为选装轴进行旋转复制操作,相邻两组定子槽和槽绕组之间相隔10°,连续9次进行定子槽及槽绕组的复制。在搭建一个转子槽后,选定该转子槽,同样执行执行Edit/Duplicate/Around Axis的顺序操作指令,在Axis中还是以Z轴为旋转轴进行复制操作,相邻的转子槽之间相隔11.125°,连续8次转子槽的复制。搭建感应电机的定子冲片几何模型、转子轭几何模型、转轴模型以及感应电机的外层面区域几何模型后,最终获得的感应电机二维1/4几何模型如图5所示。
4.2 感应电机网格划分
按照Maxwell 2D/Mesh Operations/Assign/On selection(Inside Selection、Surface Approximatio)的操作顺序进行操作,实现对有限元网格划分的相关设置,感应电机的鼠笼条、感应电机的定子及转子铁心、感应电机的定子绕组、感应电机的外层区域,如图6所示的是最终生成的感应电机有限元网格剖分,进行有限元网格剖分时采用的剖分尺度是不同的,具体剖分尺度表示如下。鼠笼条区域部分的剖分尺度为1.5 mm;定转子铁心部分的剖分尺度为4.6 mm;定子绕组部分的剖分尺度为2.5 mm;外层区域部分的剖分尺度为1 mm。
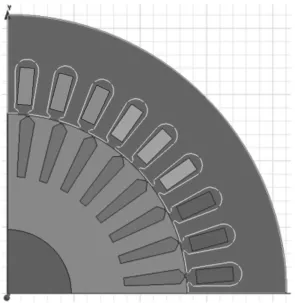
图5 感应电机二维1/4几何模型
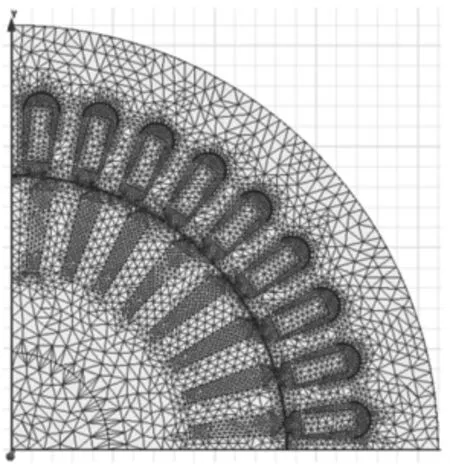
图6 感应电机网格剖分
4.3 施加边界条件
在感应电机涡流场计算与分析的过程中,需要给定子绕组施加电流源,所施加的电流源需要以幅值和相角形式表达出来,而三相感应电机各个相绕组所通电流在幅值上完全一样,但是三相电流在相位上按照ABC三相依次相差120°。考虑到对称性,在建立几何模型的过程中只建立了其中实际电机的1/4,所以需要在感应电机模型分界的地方设置主从边界条件,感应电机的导磁与非导磁介质的分界处就是本文涡流场计算求解域的最外边界,所以,在外边界我们设定磁力线平行条件。
按照Edit/Select/Edge的顺序操作,选定出最外层域并且与X轴相平行的直线;按照Maxwell 2D/Boundaries/Assign/Master的顺序操作指令,在名为Master Boundary的对话框进行设置,在其中的名为Name的框中输入名为Master的边界条件,选定最外层区域并且与Y轴相平行的直线;按照Maxwell 2D/Boundaries/Assign/Slave的顺序操作指令,在名为Slave Boundary的对话框进行设置,选定最外层区域的大圆弧线段;按照Maxwell 2D/Boundaries/Assign/Vector Potential的顺序操作指令,设定磁力线平行条件,在有限元模型上设置的边界条件分别如图7所示。
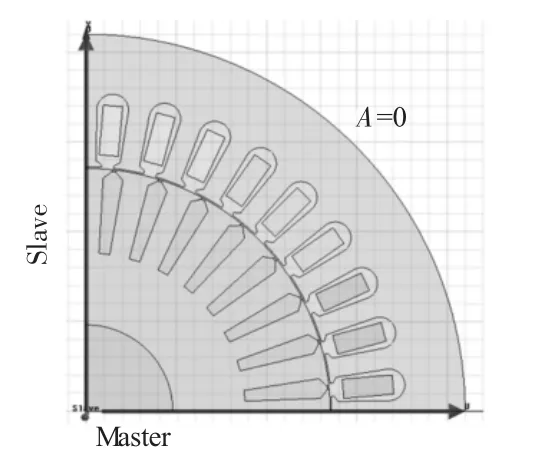
图7 感应电机边界条件施加结果
4.4 求解结果的观察
在计算机键盘上操作“Ctrl+A”,选中有限元模型窗口中的所有实体,按照Maxwell2D/Fields/Fields/Flux lines的顺序进行操作,在场图显示对话框中指定出需要进行显示的场名称,在物理量名为Quantity中选定Flux lins,观察感应电机的磁力线分布情况,选中模型中的所有实体allobjects图形,将感应电机的磁力线分布图进行显示,磁力线的计算结果如图8所示。在场图显示对话框中物理量名为Quantity中选定出Mag_B,观察感应电机的磁通密度,选中模型中的所有实体allobjects图形,将感应电机的磁通密度云图分布进行显示,磁通密度的计算结果如图9所示。
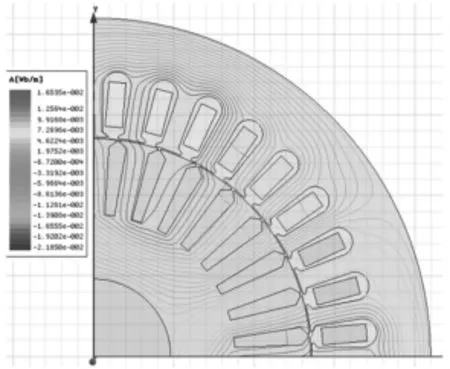
图8 感应电机的磁力线分布云图
选中模型中感应电机鼠笼条,按照Maxwell 2D/Fields/Fields/other/ohmic-loss的操作顺序进行操作,弹出的场图对话框,设置指定的物理量显示名称,其中频率指定为50 Hz,相角指定为0,在物理量名为Quantity中选定名为ohmic-loss的选项,然后选中模型中的鼠笼条,可以将0相位下的感应电机鼠笼条中产生的的焦耳损耗分布情况进行显示,具体如图10所示。
5 结论
1)深入学习了感应电机的基本结构和工作原理,并对二维电机有限元模型中三角形网格剖分的基本原则进行了分析,为进行二维感应电机涡流场计算分析铺垫了扎实的理论基础。
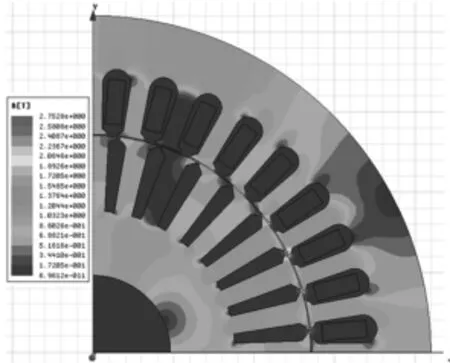
图9 感应电机的磁通密度分布云图
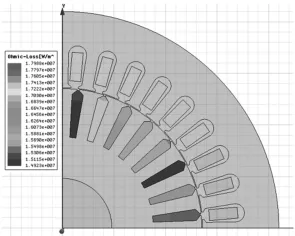
图10 感应电机鼠笼条的涡流损耗分布
2)通过有限元法,建立了三相异步电机的二维有限元模型。
3)在二维有限元模型基础上,用Ansoft Maxwell 2D软件对电机进行了涡流场分析,计算输出了磁力线分布,磁通密度以及涡流损耗分布图形等,对感应电机的优化设计具有一定的参考价值。
