基于模糊粒子滤波器的夜间车辆目标识别
2018-12-28李俊瑶
李俊瑶
(江苏警官学院刑事科学技术系图文教研室,南京210000)
0 引言
车辆识别检测是侦查工作中不可或缺的环节,目前,对于车辆的识别与追踪多基于车牌,对于无牌、套牌车等无法实现有效地追踪。另外,一线民警在进行图侦工作时,仍以人工识别追踪为主,正确率虽有保证,但耗时耗力影响办案效率,如何对车辆进行有效地识别、追踪迫在眉睫。
在目标识别检测问题中,最为常用的方法为基于贝叶斯滤波的两类方法[1-2],即卡曼滤波方法[3-4]和粒子滤波方法[5-6]。粒子滤波算法采用了蒙特卡罗方法的思想,使用样本或粒子来近似表示系统后验概率,并将其应用于非线性系统状态的估计。由于粒子滤波算法可以处理任意形式的概率,不受限于线性高斯分布的概率问题,因而在视频目标追踪领域得到了广泛的应用。不同类型的粒子滤波器也相继被提出和应用,如采用基于核密度估计的粒子滤波算法[7-11]、基于Gabor特征的粒子滤波算法[12,13]、和基于Haar 特征的粒子滤波算法[14,15]等。
然而,现有的各类方法大都基于白天的视频检测,对于夜间视频检测的适用性并不高。对于粒子滤波算法而言,该算法对目标的识别依赖于视频图像中的色彩直方图信息,当视频中光线不足、被识别目标和背景区分度不高时,粒子滤波方法的可靠性并不高。另外,人类视觉系统使用的HSI 色彩空间与视频色彩直方图所使用的RGB 空间不同,需要进行有效地统一。

为了解决这一问题,提高夜间监控视频目标识别的准确率,本文提出一种基于模糊粒子滤波器的目标识别算法。首先将原始视频帧图像转换到新的HRsg色彩空间[16],并进行滤波降噪处理;随后,引入模糊理论,对预处理后的视频图像信息建立模糊隶属度信息,将其作为粒子滤波方法的信息输入源,实现对夜间视频目标的实时检测。对比试验表明,本文提出的方法较传统方法准确性和可靠性更高,鲁棒性好,能够满足实际应用需求。
1 模糊粒子滤波器的目标识别算法
1.1 粒子滤波算法
粒子滤波是一种基于蒙特卡洛仿真的近似贝叶斯滤波算法。其核心思想是用一些离散随机采样点近似系统随机变量的概率密度函数,以样本均值代替积分运算,从而获得状态的最小方差估计。
若令X 代表系统的真实状态,Z 为系统的观测状态,在给定的t 时刻时,Xt表示该时刻系统的真实状态值,而Zt则为该时刻系统的观测状态值。粒子滤波的核心思想为如何利用已有的观测值信息(Z1:t)去预测概率分布。这一过程主要可分为两步:

第一步:预测如公式(1)所示,其中p( )X1:t-1|Z1:t-1可以视为已知量,p( )
X1:t|Z1:t-1可以看作在接收到最新观测值Zt前Xt的先验概率分布。
第二步:更新
利用最新的观测值Zt和贝叶斯规则,对先前的预测值进行更新,得到Xt的后验分布如公式(2)所示:


其中δ(.)狄拉克δ 函数,N 为粒子数。
为了简化目标跟踪程序,采用Bootstrap 粒子滤波器,有:

1.2 HSrg色彩空间与模糊粒子滤波
为实现对夜间运动车辆的识别,引入新的色彩空间和模糊理论来解决这一问题。基于新的色彩空间和模糊集理论的跟踪模型包括帧色彩处理和背景剔除两个环节。首先,利用初始识别结果,获取前景和背景的色彩信息,并间初始视频帧处转换为新的色彩空间HSrg,其中HS 为HSV 中的两个图层,r 和g 分别为RGB 图层中的对应的R 和G 图层标准化后的图层,即有r=R/( R+ G+B )和g=G/( R+ G+B)。为了减轻图像中噪声的影响,分别对识别目标在HSrg 色彩空间中每个图层使用中值滤波,得到滤波后的值分别为:

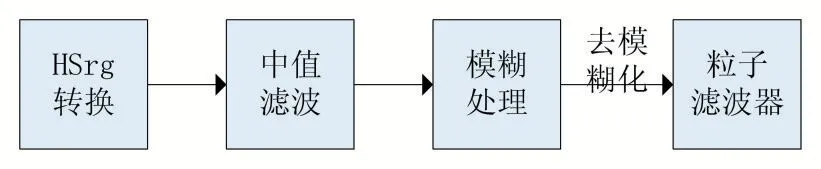
图1 模糊粒子滤波流程
类似地,可以计算初始帧图像在每个通道的中值滤波后的结果,可以分别记为:MbH、MbS、Mbg和Mbr。
利用对HSrg 色彩空间中视频帧的中值滤波结果,引入模糊理论,计算每一个色彩通道的隶属度信息(uH,uS,ur和ug)。隶属度函数采用最为常用的高斯函数的变形形式,以满足隶属度最大值为1 的条件。相应地,可以得到每个通道的隶属度:

式中σH=MbH-MoH,σS=MbS-MoS,σr=Mbr-Mor,σg=Mbg-Mog。参数λ 决定了对隶属度函数对前景和背景的区分能力,λ 值越小,区分能力越高。最终的隶属度可以定义为:

为实现粒子滤波,还需要对隶属度进行去模糊化处理。采用α-截方法,可以表示为:

对应的图像数据为:

将模糊化处理后的图像数据传递到粒子滤波器中,便可实现对被追踪目标的识别。
综上,模糊粒子滤波算法基本流程如图1 所示。首先对原始视频帧图像进行HSrg 转换,对HSrg 模式下的图形进行模糊处理,对每个通道模糊化后的图像中值滤波使被识别目标特征更为明显。随后,处理后的结果去模糊化处理,传递到粒子滤波器,实现对被追踪目标的识别。
2 仿真应用
为了验证本文提出算法的有效性,采用夜间监控视频作为检验素材,仿真实验在MATLAB 2018a 软件,Windows 10(x64)平台下进行,初始的粒子数目设定N=90。为了验证本文所提出方法的有效性和优势,将实验结果与经典粒子滤波算法的结果进行了对比分析,仿真实验结果如图2 所示。从图中可以看出,基于模糊粒子滤波的识别结果较经典的粒子滤波算法更为准确,在夜间监控视频中,能够更好地将被识别目标和背景区分开来,鲁棒性更好。

图2 仿真实验结果(红色框为本文算法的识别结果,绿色框为经典粒子滤波算法结果)
3 结语
本文提出了HRsg 色彩空间下的模糊粒子滤波算法。新的色彩空间和模糊隶属度的引入能够使得算法更好地区分视频中背景和被识别目标,特别是针对夜间视频素材,识别和目标和背景区分度不高,进而提高目标识别的可靠性和准确性。仿真对比试验验证了本文提出算法在夜间视频目标识别的有效性和可靠性。