自建机器人馆员的实践
——“小陶”诞生记
2018-12-27南京晓庄学院图书馆
曹 畋(南京晓庄学院图书馆)
机器人馆员属于专业领域服务机器人,与传统的工业机器人相比,服务机器人更贴近人们的日常生活。图书馆作为文化服务的窗口单位,对机器人馆员进行研究与建设,会为提升图书馆的服务质量、降低人力成本、推动图书馆转型带来深刻影响。[1]研究专业领域的服务机器人是服务机器人发展的重要组成部分,专业领域内服务机器人的研究对提升服务机器人行业甚至国家竞争力有着重要的促进作用。[2]
1 “小陶”开发背景及设计思路
1.1 开发背景和需求
南京晓庄学院图书馆(以下简称“我馆”)前身是陶行知先生于1927年创办晓庄试验乡村师范时设立的图书馆,当时名为“书呆子莫来馆”,之所以起这样奇怪的名字,是因为陶行知先生毕生提倡实践学习、勇于创新的教育理念。为了纪念和弘扬陶行知先生实践至上的精神,我馆将研发的第一台机器人馆员命名为“小陶”。为了研究开发“小陶”,我馆特邀馆内技术部老师、一线馆员以及南京晓庄学院机器人实验室的老师组成了专业研究团队:技术部门提供前端技术及知识库的支持、一线馆员提供需求与相关常见问题的处理经验、机器人实验室提供加工及运动控制技术的支持。
通过多方调研,我馆最终确定开发高150cm、重30kg的“小陶”图博机器人1.0版本,要求该图博机器人具备如下功能:① 自主定位和自主移动能力,移动速度约0.25m/s;② 具备引导、移动手臂等运动条件,同时需保障人机交互过程的安全性;③ 能够在室内各种材质的平整地面自由行动,且不可造成地毯磨损;④ 可以完成自主巡航和遥控指挥两种运动模式。
1.2 开发流程和思路
通过借鉴世界上现有服务机器人的控制结构和原理,辅以参考目前国内图书馆、博物馆的应用环境及应用条件,我馆对“小陶”提出了初步的性能需求,并在技术实施条件许可的范围内建立机器人基础结构设计方案。方案充分体现了图书馆、博物馆的机器人馆员的实际性能和功能需求,主要包括:机器人馆员传感器选择和设计、机器人馆员运动设计方案、机器人馆员语言对话方案等。为了更好地说明本次“小陶”的开发流程和思路图,图1将开发过程中的各个阶段及各阶段之间的关系进行了展现。

图1 机器人馆员“小陶”开发流程和思路
2 “小陶”实现的相关技术
(1)智能控制技术。智能控制技术主要包括:神经网络、云计算、大数据、模糊控制等一系列高新技术。其中,模糊控制包含变量定义、知识库、模糊化、多级判断及反模糊化五个主要方面,是机器人馆员开发中难度最大的技术部分。
(2)传感器与信号处理。机器人馆员在工作时依靠传感器获取和识别周围的环境,一般来说需要获取的内容越多,所需要的传感器也越多。目前常用的传感器有光传感器、声传感器、力传感器、距离传感器等。
(3)自主导航与定位是机器人馆员研究的核心问题之一,也是机器人馆员研究的难点。目前,其他领域的服务机器人已经开始研究采用传感器和神经网络技术共同完成机器人的自主定位和导航的技术。[3]为了直观地说明机器人馆员导航定位系统,笔者绘制了机器人馆员导航定位系统图(见图2)。
(4)路径规划技术。机器人馆员需要在工作空间中找到一条从起始位置到目标位置的路径,并且该路径能有效地避开所有障碍物。目前采用的路径规划技术可分为智能和非智能两种:非智能的路径规划办法有自由空间法、栅格解耦法、人工势场法等;智能路径规划办法有模糊逻辑、遗传算法、Q学习、神经网络等基于人工智能的技术方案。[4]
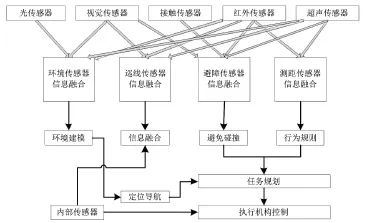
图2 机器人馆员导航定位系统
(5)人机交互技术。目前常用的人机交互技术包括:文字识别、语音合成与识别、图像识别与处理、机器翻译等。通过人机交互,用户不但可以随时改变机器人的状态而且可以进行信息交互。
2.1 传感器的选择
“小陶”机器人馆员需要具备自主移动和避障功能。机器人馆员拟采用8个避障传感模块和12个光电传感模块,用于“小陶”对地面或物体表面的灰度检查,同时,配合激光传感器和图像传感器对地面和障碍物进行检测。传感器的放置是设计的难点之一。比如:当单位面积传感器放置得过多时,就会出现多个传感器同时发现一个障碍物的情况,产生大量的干扰数据,增加数据处理难度;当单位面积上传感器过少时,就会造成障碍物漏检测的情况。为解决这一问题,在对“小陶”进行设计时,研究团队将8个避障传感模块和12个光电传感模块均匀地放置在底盘圆周的边缘处,同时将激光传感器和图像传感器放置在较高的位置,以此保证“小陶”在行动中能够避开高低不同的障碍物。
“小陶”的自主巡线功能采用最新的3D机器人视觉来实现,即通过两个高速图像传感器把经过图像处理的3D环境信息传输给“小陶”。而高速摄像头由于处理过程比较复杂,摄影处理速度相对较慢,所以在具体使用过程中,黑白路线由仅能够识别黑色和白色的激光传感器和红外线传感器处理,复杂位置环境的识别由高速摄影头处理,以保证“小陶”自主巡线功能具有较高的效率。
2.2 主控芯片选择
根据预算和实际需求情况,研究团队为“小陶”选择了机器人自体控制与信息处理模块MH-Cel001。该芯片属于8位系列单片机中配置较好的一款,工作时间平路为16MHZ,有80个可编程I/0口,有8个8位定时器/计数器,且具有独立的预分频和比较器功能;有两路8位PWM、6路16位PWM、13个通信接口。开始的时候考虑过ATMEL公司AVR系列的ATMEGA128,但由于其无法同时处理二十个以上的脉冲信号而放弃。
2.3 总线实现
目前,服务机器人的常用总线包括RS-232、RS-422、RS-485、CAN等。① RS-232总线是由电子工业协会 (Electronic Industries Association,EIA) 制定的,其通信模式为一对一,抗干扰能力较差,最远距离为 15m,最高速率为 20Kbps。② RS-422是由RS-232发展升级而来的,传送距离提升到了1200m,传送速率达到10MB/s,可以实现一对多的单方向传输。③ RS-485是一种串行总线,最高传送速率为10MB/s,最多可以安装128个收发器。但由于没有数据链路层而无法识别数据错误,易导致一个点出现问题则可能整个总线导致崩溃的恶劣情况。④ CAN是由ISO国际标准化组织提出的一种串行总线协议,最远传送距离高达10km,总线节点多达110个,具有很好的数据效验机制,数据通信非常可靠。通过以上对常用总线在速率、开发周期、容错机制、传送距离、通信机制等方面的比较,研究团队最终选择了性能突出、安全可靠的CAN作为“小陶”的总线,并且选用了广州致远股份有限公司生产的CANalyst-Ⅱ分析仪+应用协议分析工具作为CAN总线分析仪,该产品支持两路CAN接口及USB 2.0接口,具备CAN总线协议分析功能。[5]
2.4 总控制系统的实现
机器人馆员的主要功能是在图书馆、博物馆等的入口处迎宾,向进馆用户介绍使用规则、馆藏资源、特色服务、注意事项等内容,所以软件设计上不仅需要机器人馆员能够实现引导来宾、与人交流、自主行走、发现和避让障碍等功能,还应具有安全可靠、容易操作、容易调试的特性。为此,研究团队选择微软提供的Virual C#6.0作为“小陶”的软件开发环境,控制芯片为MH-Ce1001芯片。机器人馆员的控制流程见图3。
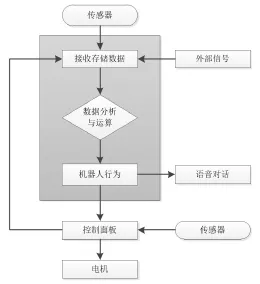
图3 “小陶”的控制流程
其中,接收存储数据、数据分析与运算、机器人行为部分对应的是“小陶”的主机部分。机器人软件可以分为三大部分,分别是机器人底盘移动控制程序、主机软件、其他运动控制程序;主机软件按照功能分为三个部分:语音识别与合成部分、自动移动与遥控移动功能、其他动作控制部分;机器人底盘移动控制程序包括:传感器数据处理程序、自动巡线避障程序、电机控制程序、中断控制程序,数据传输控制程序。由于目前“小陶”的研发经费没有全部到位,所以其动作控制部分还未完全开发,但已做出预留方案。“小陶”的软件总体结构见图4。
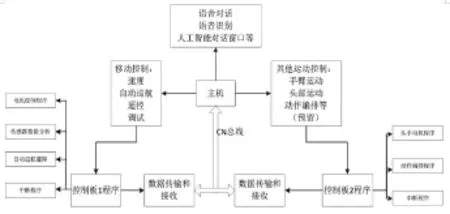
图4 “小陶”的软件总体结构
2.5 电机控制实现
对于“小陶”的移动功能,研究团队采用了万向轮设计,轮子半径约16mm。在应用环境理想状态下,假设“小陶”的中心在底盘中心上,笔者绘制出了“小陶”的运动学示意图(见图5)。

图5 “小陶”的运动学示意图
在坐标系XOY中,令人的坐标系为X’O’Y’,则在任意时刻t,“小陶”在坐标系中的位置为Q=(x,y,θ)T,θ表示某时刻轴X’与轴X的夹角,为“小陶”的角速度(逆时针为正),x、y代表“小陶”的中心位置。“小陶”各轮的线速度为V=(v1v2v3v4)T。
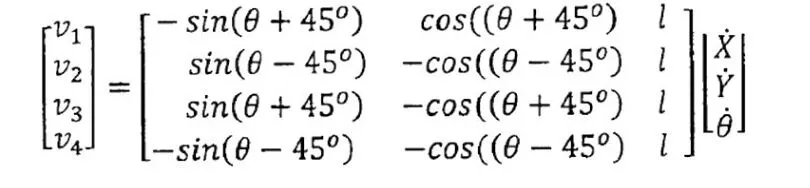
当“小陶”平动时,轴X’与轴X的夹角为0,v1=-v3,v2=-v4;旋转运动时,四个轮以相同方向、相同速度驱动。[6]由此可以得出,“小陶”底板运动的基本函数。
“小陶”向前走的函数为
Forward
{MoveContr1 (1,move,1);
MoveContr2 (1,move,1);
MoveContr3 (1,move,0);
MoveContr4 (1,move,0);}
“小陶”后退的函数为
Backword
{MoveContr1 (1,move,0);
MoveContr2 (1,move,0);
MoveContr3 (1,move,1);
MoveContr4 (1,move,1);}
“小陶”向左的函数为
Left
{MoveContr1 (1,move,0);
MoveContr2 (1,move,1);
MoveContr3(1,move,1);
MoveContr4(1,move,0);}
“小陶”向右的函数为
Right
{MoveContr1(1,move,1);
MoveContr2(1,move,0);
MoveContr3(1,move,0);
MoveContr4(1,move,1);}
“小陶”旋转的函数为
{MoveContr1(1,move,1);
MoveContr2(1,move,1);
MoveContr3(1,move,1);
MoveContr4(1,move,1);}
Anti-clockwise
{MoveContr1 (1,move,0);
MoveContr2 (1,move,0);
坚持把培育和引进创新创业人才作为支撑绿色发展战略的关键举措来抓,真正把人才作为创新发展的核心要素和破解发展难题的“金钥匙”,以人才创新驱动新旧动能转换。
MoveContr3 (1,move,0);
MoveContr4 (1,move,0);}
有了“小陶”底板运动的基本函数,很容易衍生出“小陶”左上45°、左下 45°、右上45°、右上45°的函数。有了这些函数的综合应用,就可以完成“小陶”在平面上的任何运动控制了。
“小陶”左下45°走的函数为
{MoveContr1 (0,move,1);
MoveContr2 (1,move,1);
MoveContr3(0,move,1);
MoveContr4(1,move,0);}
“小陶”左上45度走的函数为
{MoveContr1(1,move,0);
MoveContr2(0,move,1);
MoveContr3 (1,move,1);
MoveContr4 (0,move,1);}
“小陶”右上45度走的函数为
{MoveContr1 (1,move,1);
MoveContr2 (0,move,1);
MoveContr3 (1,move,0);
MoveContr4 (0,move,1);}
“小陶”右下45度走的函数为
{MoveContr1 (0,move,1);
MoveContr2 (1,move,0);
MoveContr3 (0,move,1);
MoveContr4(1,move,1);}
2.6 智能应答实现
在设计构想中,“小陶”具备与人交流的功能,然而完全自行开发语言系统是一项难度巨大的工程。研究团队计划采用科大讯飞的语音识别系统,目前科大讯飞公司公开提供语音合成系统InterPhonic和语音识别系统InterReco。InterPhonic 6.0能够朗读指定文本中的文字内容、导出朗读的语音文件;InterReco 5.0能为自助语音服务提供呼叫导航功能和关键字语音识别,[7]该系统的识别率处于行业领先,且提供全面的开放支持。InterPhonic 6.0几乎可以满足所有中国方言的识别和输入,甚至可以完成中英文的混合输入,且InterPhonic 6.0支持的对接口也非常多,常用的SAPI接口、COM接口都在其支持范围内。
“小陶”在应答知识库的提取上采用了欧氏距离相似度距离度量算法,这种算法相对于常用的余玄相似度算法而言,具有更高的维度和准确度。如果将余玄相似度算法看成平面上两条线段的夹角,那么欧氏距离相似度距离度量算法所表现的则是三维空间中两个点的空间距离。
3 总结
目前,虽然本馆开发的“小陶”1.0版本已经基本完成,但对于“小陶”的研发和建设并没有结束。总体来说,自行开发服务机器人虽然前期投入较直接购买成品略显高昂,但后期更容易根据自身的需求来调整和改进。对于还没有固定服务模式的新兴图书馆机器人馆员来说,这样的建设模式不但促进了高校学科建设,而且为图书馆智慧机器人的服务建设积累了宝贵的经验。
