一种履带式起重机控制系统设计研究
2018-12-26石晓妹
石晓妹,丁 平
(1.徐州徐工挖掘机械有限公司,江苏 徐州 221000;2.无锡德林防务装备股份有限公司,江苏 无锡 214191)
履带式起重机是一种履带式底盘,桁架臂结构,广泛应用于各种作业场合的中大吨位起重机,具有起重量大、可带载行走、接地比压小、作业灵活等优势。履带式起重机作为电液控制的大型起重类工程机械,控制逻辑复杂,零部件参数匹配困难,安全保护措施繁多,动作输出控制要求平稳精准,对整机厂家的硬件设计、综合控制、软件开发等技术水平都要求很高。
1 控制系统总体设计
本文以260t履带式起重机为例,介绍控制系统的组成以及程序结构。260t履带式起重机为全新开发设计的产品,规划的使用工况较多,使用康明斯QSL9-C325发动机提供动力。电控箱安装在驾驶室背后位置,多了一道驾驶室后门保护,可有效防止雨水的侵蚀,控制箱内主要包含一块IFLEX5扩展型主机、一块IFLEXC3基本型控制器,一块U/I转换盒、一个防雷模块以及若干继电器和保险等。驾驶室内控制面板信号、转台电气各信号以及臂架电气各信号通过物理线束连接到控制箱内的PLC控制器。
1.1 硬件设计
IFLEX5扩展型主机作为控制节点Node1,也作为力矩限制使用,主要采集各动作手柄的信号、各工况拉力传感器信号、主臂和塔臂角度传感器、主副卷扬压力信号以及桅杆油缸压力信号。IFLEXC3基本型控制器作为控制节点Node2,主要负责和发动机通讯,控制发动机转速以及读取发动机参数,还有负责油箱温度传感器、油箱液位传感器,水平仪、风速仪、手油门和脚油门等信号采集。驾驶室内10英寸触摸屏作为控制节点Node3,主要显示系统参数,包括力限器数据、故障报警信息以及工况设置参数等。当然各控制器也采集控制输入输出开关量信号,在此就不一一列举。各控制节点之间通过CAN总线通讯,IFLEXC3基本型控制器和发动机ECU之间通过J1939通讯。控制系统的组成如图1所示。
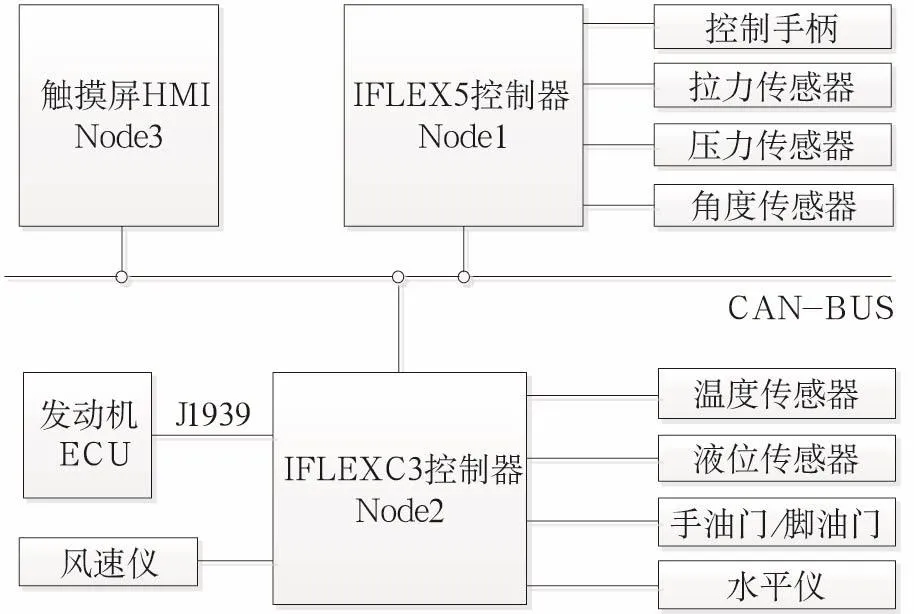
图1 控制系统组成框图
1.2 软件设计
260t履带式起重机控制程序采用结构化编程,把控制系统分成单个的控制子程序,再在主程序Main中调用各个子程序,把一些相同的控制功能开发成功能块FB,再在子程序中调用FB,只是对应的程序输入接口和输出接口不同,提高了程序的标准化,比如主卷控制和副卷控制以及变幅、回转等控制都需要使用手柄控制函数,只是对应的输入和输出变量不同。主程序Main包含的子程序较多,主要包括输入输出程序、动作允许控制程序、GPS控制程序、主卷控制程序、主变幅控制程序、桅杆控制程序、副卷控制程序、塔臂变幅控制程序、回转控制程序、行走控制程序、吊钩高度计算程序、数据存储程序、CAN通讯程序、故障报警控制程序等。系统程序结构如图2所示。
2 控制系统关键技术研究
履带式起重机控制系统的关键就是如何平稳地控制好各卷扬机构,比如二次提升控制,还有手柄的斜坡控制,使操作动作即平稳,又响应及时。对于200t以上移动式起重机,还需要吊钩离地高度显示,精确的吊钩离地高度计算也是十分重要。
2.1 二次提升控制
二次提升重物下滑现象不仅存在于开式液压系统中,同样也存在于闭式液压系统中,而且在闭式系统中会更加严重。闭式系统中,泵的出油口与马达进油口之间的管路越长,压力建立的容性特性就越明显,二次提升下滑现象就越严重,260t履带式起重机起升液压系统为开式系统。
目前常用的解决二次提升下滑的方法为压力记忆控制,即在起重机起吊重物的过程中,控制器需要记录马达处的压力数值,等待载荷的再次起升。一旦控制器接收到需要在空中再次起升载荷时,控制系统先监测起升回路是否已经达到足够支撑载荷的压力,然后制动器才能打开。若是压力没有建立起来制动器就打开,负载就可能下滑;若是延迟时间太久,系统压力就可能过高,制动器突然打开,卷扬会出现冲击。因此,如何记忆正确的压力值、确定最佳的制动器开启时间,就成为压力记忆控制技术的核心。
本文专门针对二次提升控制设计开发了功能块Hoist_secondly_up_load。其中输入变量为:press为压力传感器的采样值,n为压力采样数目,TP为起始压力采样屏蔽时间,joystick_maxdead为手柄死区上限值,joystick_mindead为手柄死区下限值,hoist_joystick为手柄实际值,limit_press和largest_press分别为二次提升作用的最小压力和最大压力,zero_switch为清零开关,reset为系统复位标志,act_load为实际吊钟量,reev为倍率,Engine_speed为发动机转速,k_remain为起升过程中压力高于最大压力的百分比。输出变量为:hoistup_ok为二次提升允许标志,Target_press为目标压力值,Act_press为实际压力值,diff为目标压力值和实际压力值之间的差值。输入输出变量为:up_largest_press为上升过程中最大压力值记录值,hoist_status为吊钩状态(1为空钩,2为重物离地,3为重物部分离地),largest_load为最大负载记录值。二次提升控制模块如图3所示。
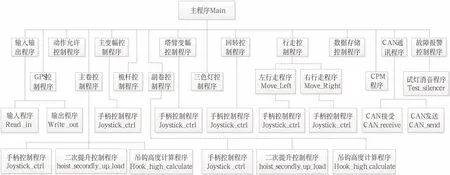
图2 系统程序结构框图
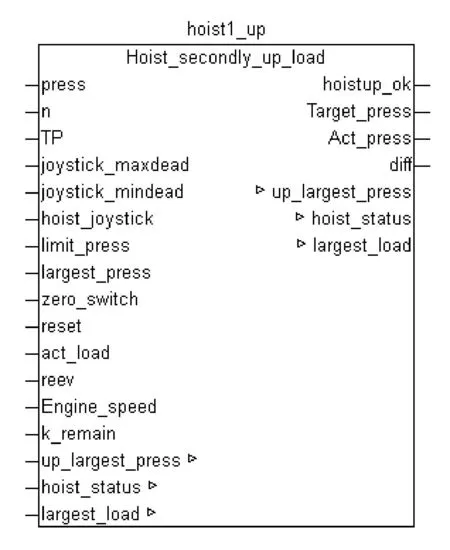
图3 二次提升控制模块
2.2 吊钩高度计算程序
260t履带式起重机通过在主臂和副臂上安装角度传感器以及在主副卷扬上安装编码器,再通过控制器实时计算主钩和副钩的离地高度。以主钩为例介绍吊钩高度计算的原理,图4为卷扬缠绕钢丝绳剖面简易示意图,图5为主钩工况简易模型图[4]。
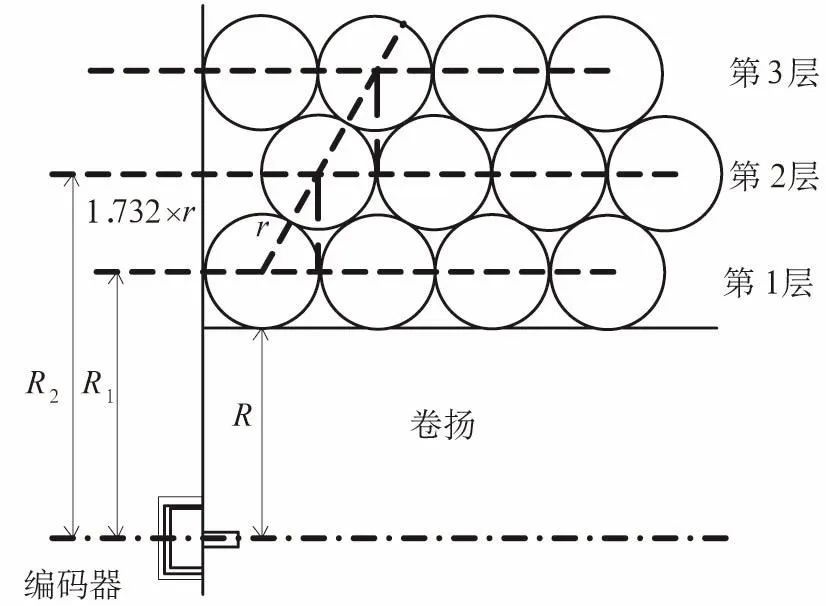
图4 卷扬缠绕钢丝绳剖面示意图
设转台和主臂连接铰点为o,主卷扬半径为R,主卷扬钢丝绳半径为r,主卷扬每层缠满钢丝绳圈数为m,主卷编码器当前记录的旋转圈数为N,主钩倍率为Reev,主卷钢丝绳总长为LT,主卷扬中心到滑轮1中心的长度为L1,滑轮1中心到滑轮2中心的长度为L2,主臂长度为Lm,转台和主臂连接铰点离地面高度为Ho,滑轮3到吊钩底部的高度为H2。
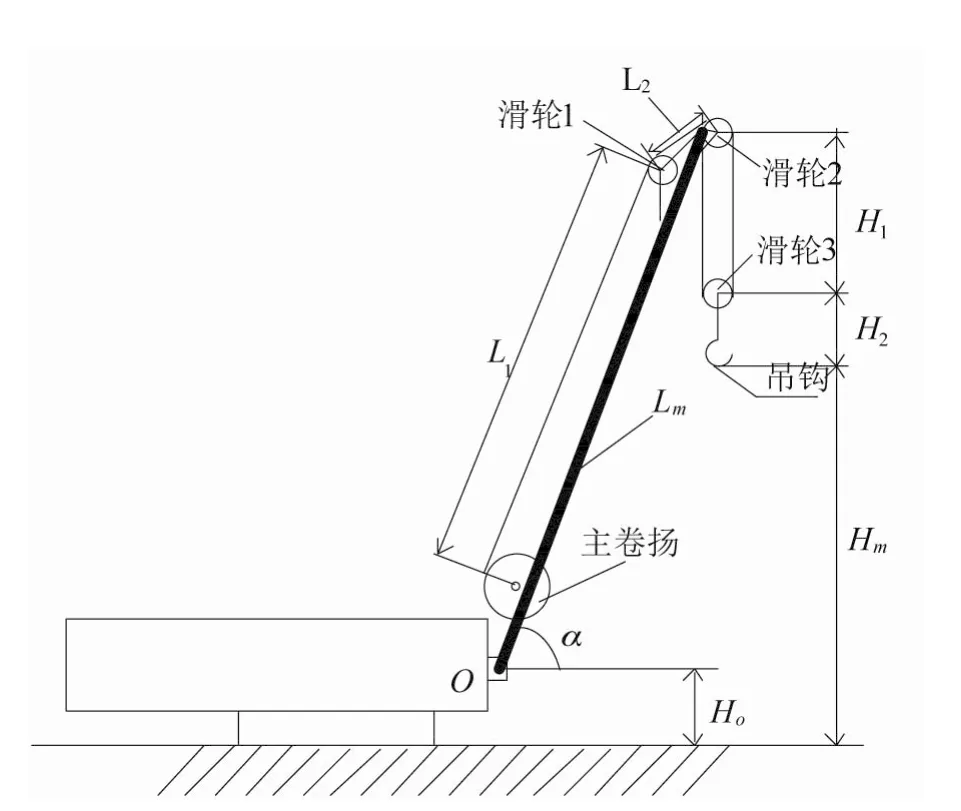
图5 主钩工况简易模型图
则主卷第1层钢丝绳长度为

其中R1=R+r
第2层钢丝绳长度为

其中R2=R1+1.732r
第n层钢丝绳长度为

其中Rn=R1+1.732(n-1)r
则滑轮2到滑轮3的高度为

则主钩离地高度为

对应的控制程序模块Hook_high_calculate如图6所示,其中Coder为编码器计数值,需要在程序块中转换为圈数,Angle_M为主臂角度传感器值,Reset为编码器标定按钮,k为修正系数,Value为修正值,功能块除了能够输出吊钩实时高度还能钩显示吊钩运动速度。
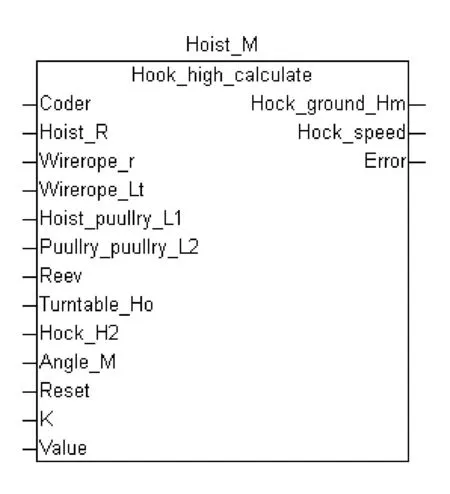
图6 吊钩高度计算模块
3 结 语
260t履带式起重机控制系统能很好地满足设备的动作要求,同时触摸屏上显示界面生动、显示数据准确。特别对于控制程序,采用结构化程序设计,提高了程序的可读性和可维护性。通过通用功能块的开发,减少了很多重复编程,而且也可以推广到其他吨位的产品上,大大地提高了编程效率。该产品目前已经交付客户使用了很长时间,效果良好。
