塔机防碰撞控制技术研究
2018-12-26申继军程声炎
杨 丹, 张 伟, 申继军, 程声炎
(廊坊中建机械有限公司,河北 廊坊 065000)
1 问题提出
装配式建筑施工在构件吊装过程中存在预制构件与施工现场障碍物频繁碰撞的现象,导致构件破损无法使用,而现有防碰撞技术无法防止吊装物的碰撞。想要进一步提高装配式建筑的施工效率,就需要解决预制构件吊装过程中碰撞损坏问题,如:①预制构件与静止目标的碰撞(静止目标如:建筑物);②预制构件与移动目标的碰撞(移动目标如预制构件、吊臂)。
2 防碰撞控制技术方案

图1 防碰撞控制技术方案图
防碰撞控制技术方案如图1所示。通过图形识别技术解决吊装物本身与固定或移动目标的碰撞问题。
判断目标为移动目标还是静止目标。如果为移动目标物,则根据移动信息建立目标物背景框架和邻近背景框架,将目标物背景框架和邻近背景框架中目标物轨迹进行拼接并进行移动轨迹预测得到二维移动轨迹预测。结合二维移动轨迹预测,利用激光入射移动目标物获取反弹的射线对所述移动目标物进行追踪得到三维移动轨迹预测。如果为静止目标物,则根据图像信息对静止目标物进行定位,并根据定位结果计算几何坐标和物距。
根据三维、二维轨迹预测或根据静止目标定位,判断物距是否满足安全阈值,并在不满足安全阈值的情况下,启动报警。
防碰撞控制技术原理如图2所示。
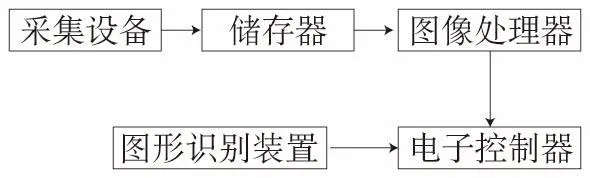
图2 防碰撞控制技术原理图
采集设备同时采集满足几何条件的静止目标物体的物距图像信息,并将物距图像信息发送给存储器,储存器用于存储图像信息,并将图像信息发送至图像处理器,图像处理器将采集到的图像进行匹配处理,并得出吊钩与静止目标物的距离值1。图形识别装置用于识别构件的外廓尺寸,得出距离值2,电子控制器将得到的距离值1和距离值2进行分析,根据物距启动报警控制程序。
当目标物体移动时,电子控制器对采集设备录入得信息进行移动轨迹预测,并根据预测的结果判断是否会发生碰撞。
3 方案的实施
3.1 分析构件与静止障碍物碰撞关系时
如图3所示,利用采集设备可识别出吊钩距静止障碍物距离x1,z1,图形识别装置能够识别吊钩距构件外廓尺寸及x2,z2,计算出构件外廓碰撞点距固定障碍物:水平直线距离x=x1-x2;垂直距离z=z1-z2。
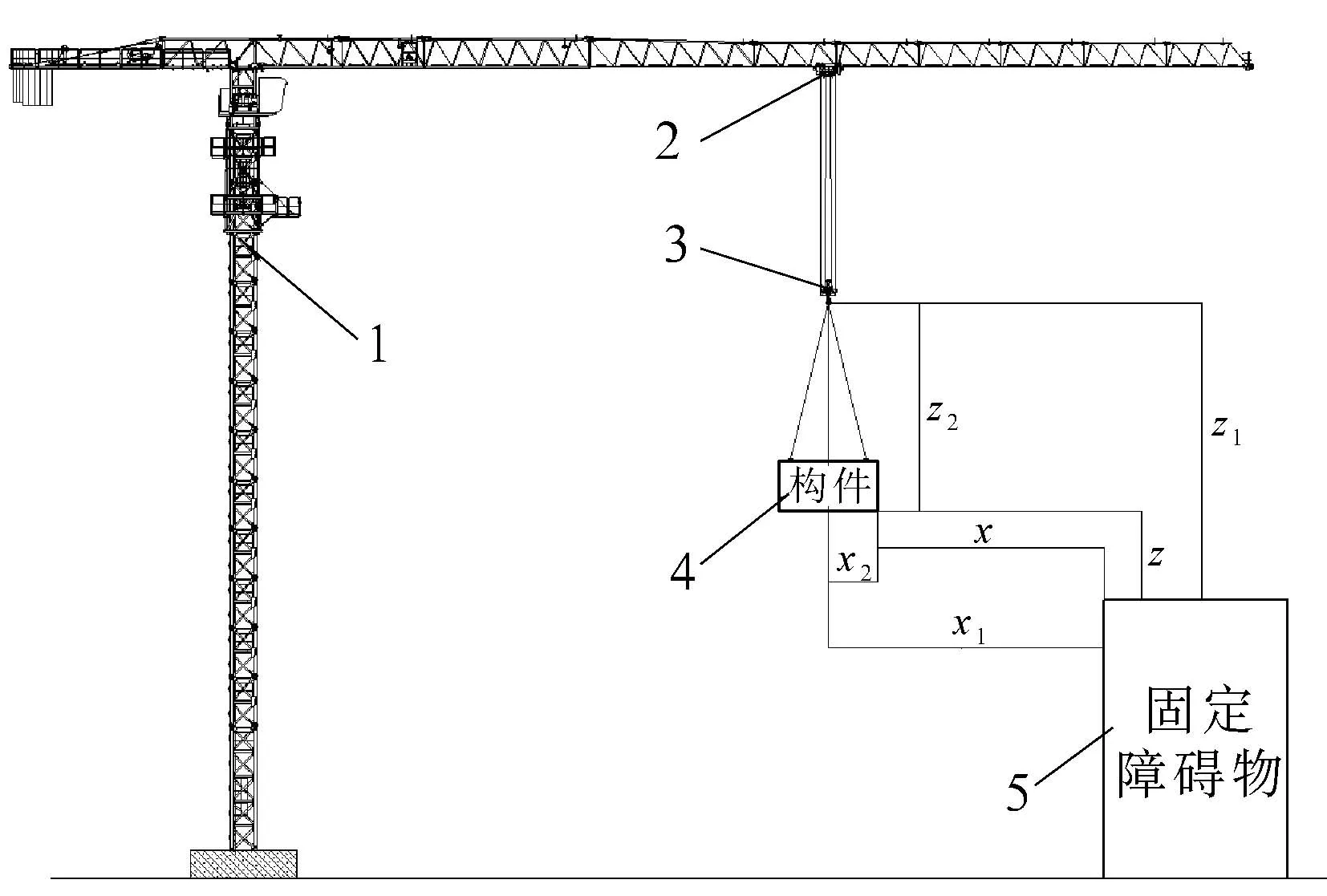
图3 构件与固定障碍物碰撞关系
报警及控制原理,如图4所示,水平直线方向碰撞关系:X2为预设的预警距离,X1为预设的危险距离。当x>X2时,正常吊装;当X2≥x>X1时,系统报警并减速向固定障碍物方向运动;当x=X1时,系统停止向障碍物方向运动。
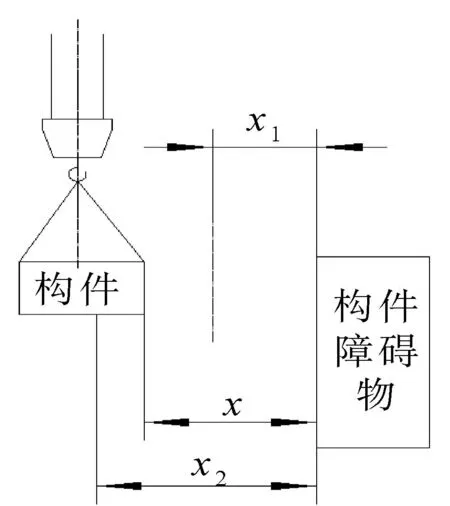
图4 水平方向碰撞关系
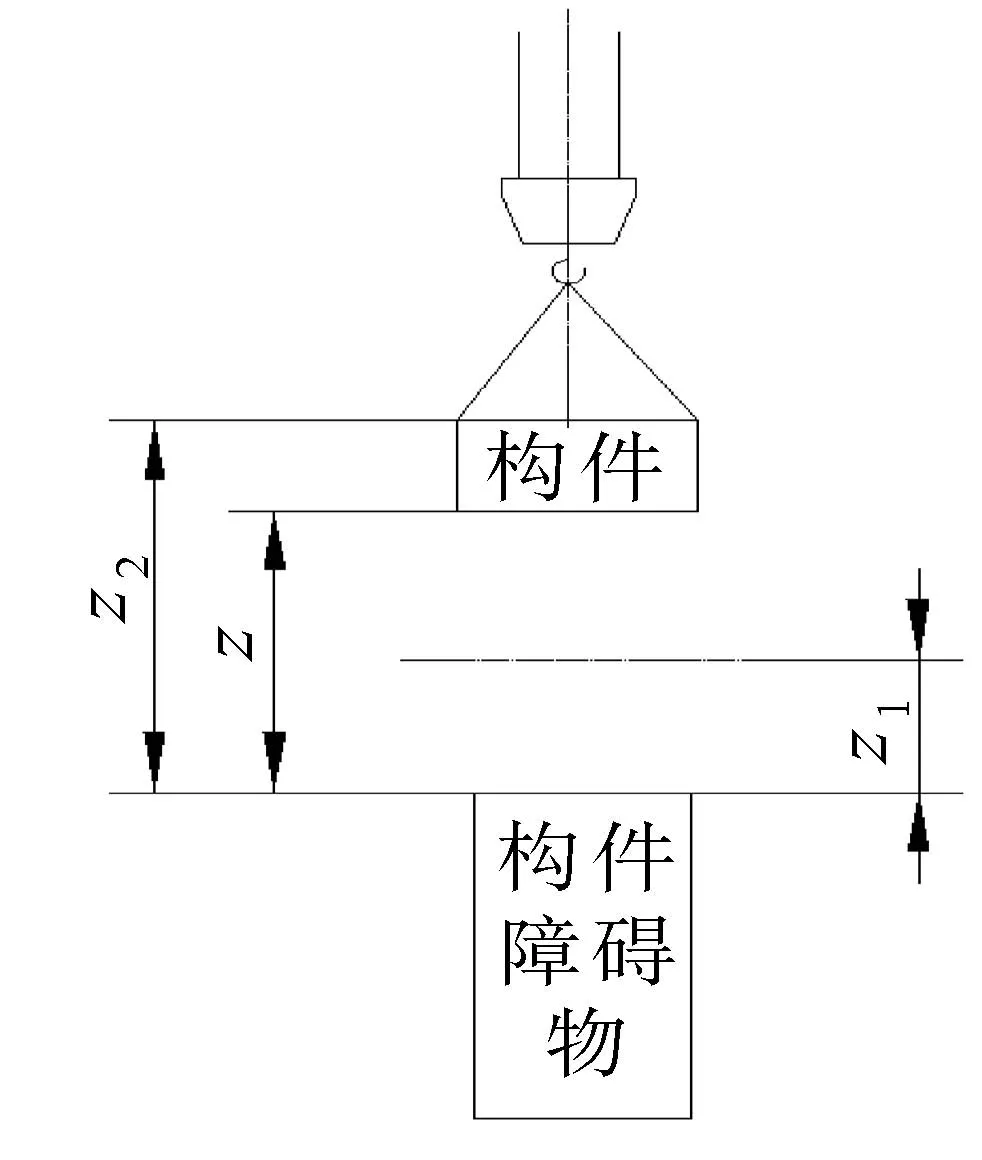
图5 垂直方向碰撞关系
如图5所示,垂直方向碰撞关系:Z2为预设的预警距离,Z1为预设的危险距离。当z>Z2时,正常吊装;当Z2≥x>Z1时,系统报警并减速向固定障碍物方向运动;当z=Z1时,系统停止向障碍物方向运动。
3.2 分析构件与移动障碍物碰撞关系时
如图6所示,首先获得移动障碍物的二维轨迹,某椭圆形物体最先出现在目标物背景框架中(虚线椭圆位置),当物体发生移动(本图假设物体移动到黑色实心位置),即将移出该目标物背景框架,此时将找寻与该目标物背景框架相关联的邻近背景框架,并与目标物背景框架拼接在一起,此时该邻近背景框架变为新的目标物背景框架,如此类推,通过若干的目标物背景框架和邻近背景框架拼接完整的二维平面,并最终获取了移动目标物在该二维平面上的二维移动轨迹,根据该二维移动轨迹可方便地预测二维运动趋势。
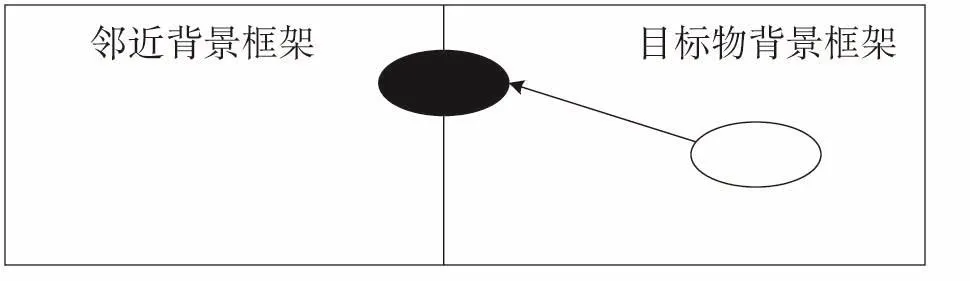
图6 构件与移动障碍物碰撞关系
为提高空间追踪和预测的准确度,还设置有激光发射器,利用反射的射线追踪移动目标物并获得三维的轨迹预测。
4 结 语
运用此防碰撞控制技术可以大大提高构件就位的精确度,减少构件因碰撞而造成的损坏,从而提高装配式建筑施工过程中的效率,推动快速装配绿色发展。本文仅仅说明了构件与相关障碍物碰撞的情形,同时还具备群塔作业时吊臂的防碰撞功能。
