非线性量子信息熵及其在行星变速箱特征提取中应用
2018-12-21张兵志冯辅周吴守军
丁 闯, 张兵志,2, 冯辅周, 吴守军
(1. 陆军装甲兵学院 车辆工程系, 北京 100072; 2. 北方特种车辆研究所, 北京 100072)
由于行星传动具有重量轻、体积小、传动比大、承载能力强、传动效率高等诸多优点,因此已被广泛应用于军用装备和民用装备中。行星齿轮箱的复杂结构决定了其振动响应比定轴齿轮箱更加复杂,并存在明显的非线性、非平稳性,且故障响应微弱[1]。对其振动信号特征提取一直是研究的重点和难点。
由于信息熵能够有效的检测振动信号时间序列的动力学特性,其在特征提取及故障诊断中的应用越来越引起了人们的重视,取得了一定的研究成果。在使用信息熵进行特征提取中,如何定义各个事件,并计算各个事件出现的概率,是不同信息熵方法的区别之处,也是信息熵能否有效用于特征提取的关键[2-3]。
近年来,量子理论取得了快速的发展,已经成为了极具革命性、神秘性的理论。量子理论与传统的信息表达方式存在较大差异,具有优异的性能,其量子态的叠加性、相干性、纠缠性,能准确表达很多客观存在的规律[4]。
依据量子理论全新表达方式的优势,将其引入信息熵,提出一种结合信息熵和量子理论的特征提取新方法—非线性量子信息熵(Nonlinear Quantum Entropy, NLQE)。
1 量子理论
量子理论在近年来取得了广泛的研究,成为了一种行之有效的信息处理工具,同时推动着相关领域的快速发展。借助量子理论描述微观世界的全新思想及其特殊的状态表达形式,量子理论在振动信号的处理方面亦取得了有效的应用[5-6]。
1.1 量子理论基础
量子比特是量子理论体系中描述量子世界的基本单位,它所表达的状态为一种叠加态。其数学表达式为
|φ〉=a|0〉+b|1〉
(1)


(2)
由式(1)和(2)可知,量子比特可以描述不同概率的两个基态组合而成的各种状态。
1.2 非线性量子比特
振动信号的量子表达是进行进一步数据处理的关键。本节给出振动信号的非线性量子表达式,用于描述振动信号的状态。
假设一维振动信号为X={x(i),i=1,2,…,N},共有N个采样点元素组成,使用下式对信号X的每个采样点元素x(i)进行归一化处理,得到y(i)∈[0,1]
(3)
根据文献[7],提出振动信号非线性量子表达的数学式,将振动信号从时域空间映射到量子空间,从而用于分析振动信号的状态。归一化后的振动信号非线性量子表达为
|y(i)〉=cos(y(i)×π/2)|0〉+sin(y(i)×
(4)
式中:cos(y(i)×π/2)和sin(y(i)×π/2)为两个基态|0〉和|1〉的概率幅值。而cos2(y(i)×π/2)和sin2(y(i)×π/2)为两个基态|0〉和|1〉的概率,由于cos2(y(i)×π/2)+sin2(y(i)×π/2)=1,即满足归一化条件,符合量子比特的定义,可用于振动信号量子化。由于概率cos2(y(i)×π/2)和sin2(y(i)×π/2)为非线性变化,因此称式(4)为振动信号的非线性量子化。
1.3 振动信号多量子位系统
在行星齿轮箱振动信号处理中,往往需要同时对多个采样点进行处理,对单个采样点量子化不能满足要求,因此本节主要研究对振动信号多个采样点的非线性量子化。
若振动信号的每个采样点都使用量子比特非线性量子化,则一个由相邻k个采样点的振动信号可由k个量子位描述,其中第i个量子位的状态为|φi〉=ai|0〉+bi|1〉,该振动信号可用k个量子比特的直积表示
|Yk〉=|y(1)〉⊗|y(2)〉⊗…⊗|y(k)〉=
a1a2…ak|00…0〉+
a1a2…ak-1bk|00…01〉+…+
(5)

(6)
此处取振动序列X中相邻3个采样点为例说明多采样点的非线性量子化过程。
假设振动序列X中相邻三个采样点为X3={x(m-1),x(m),x(m+1)},m∈[1,N-1],对序列X进行归一化,X3对应Y3={y(m-1),y(m),y(m+1)},可将其生成含3个量子位的量子系统,其态矢|ib〉∈{|000〉,|001〉,…,|111〉}。
结合归一化公式,对于3量子比特系统,若采用非线性量子比特表示,则振动信号的3个相邻采样点可表示为
(7)
为了更直观的反映量子化的实质,X3进行量子化过程可表示为如图1所示。
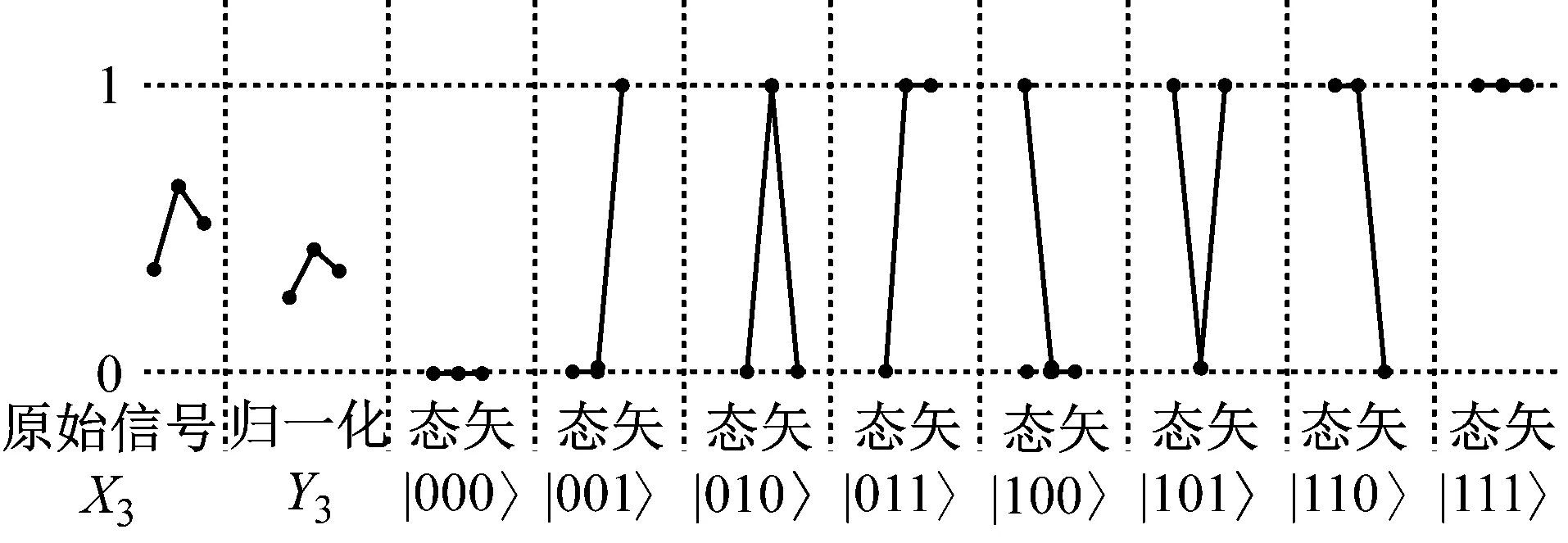
图1 振动信号量子化过程
2 非线性量子信息熵
在信息通讯中,使用二进制符号及其出现的概率表示消息数量,Shannon使用“熵”的概念用于描述信息论中信息的不确定性,提出了信息熵,同时给出了信息熵的数学表达式,将信息熵作为表示输出信息的信息量指标[8]。Shannon定义一个不确定的概率分布信息熵为
(8)
式中:pi为事件i出现的概率,信息熵仅与各事件出现的概率和事件的数量有关。信息熵的大小可定量描述概率系统的分布情况。
2.1 量子理论引入信息熵的可行性分析
量子理论作为一门新兴科学在各行各业中取得了较快的发展,而信息熵作为一种定量衡量时间序列信号状态的算法具有十分重要的作用。如何将量子理论引入到信息熵,并使其具有更广阔的发展空间是本文研究的重点。
信息熵最初用于描述二进制信息的不确定程度,在量子理论中,亦使用二进制表示基态或态矢,各基态或态矢出现的概率亦可准确的反映系统状态。信息熵与量子理论中使用各量子基态或态矢及其出现的概率表达信息状态极其相似,受此启发,可将量子理论与信息熵结合描述振动信号的运行状态,用于提取系统的运行状态特征。
在行星齿轮箱运行过程中,其振动信号与其运行状态有关,而不同的振动时间序列对应的量子表达中各基态或态矢的概率幅值或概率亦不同,可通过信息熵方法计算各基态或态矢的熵值,并以此作为行星齿轮箱运行的特征。由此提出基于非线性量子信息熵的特征提取方法。
2.2 非线性量子信息熵基本原理
结合量子理论和信息熵的概念,根据可行性分析思路,并结合排列熵、样本熵等其他信息熵原理,非线性量子信息熵的基本原理如下:
(1) 振动信号归一化。设振动信号时间序列X={x(i),i=1,2,…,N}。根据式(3)对振动信号时间序列进行归一化,得归一化后时间序列为Y={y(i),i=1,2,…,N}。
(2) 相空间重构。对时间序列Y进行相空间重构,得到矩阵Y0
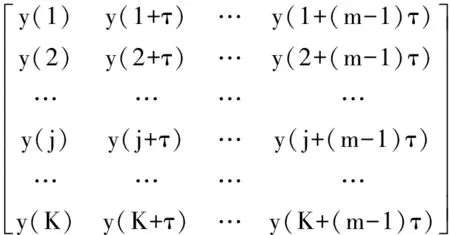
(9)
式中,j=1,2,3,…,K,m为嵌入维数,τ为延迟时间,K=N-(m-1)τ。重构矩阵中的每一行Y0(j)为一个重构分量,重构矩阵中共有K个重构分量。
(3) 重构分量非线性量子化。将重构矩阵中的每个重构分量使用多量子位系统非线性量子化,组成由m个量子位组成的量子位系统,态矢数量n=2m,得

(10)

(11)
(4) 计算各态矢概率。计算所有重构分量中同一态矢的概率和,得出各态矢出现的概率
(12)
式中,k=1,2,3,…,n。
(5) 计算非线性量子信息熵。将各态矢出现的概率作为事件出现的概率,计算信息熵
(13)
(14)
根据Shannon信息熵概念,非线性量子信息熵Hq(X)表示时间序列X量子化后各态矢的概率分布。Hq(X)越大,说明各态矢的概率分布越均匀,即各态矢出现的概率越接近;反之,Hq(X)越小,说明各态矢出现的概率相差越大。对于行星齿轮传动,Hq(X)越大,说明其运行状态越稳定,即越接近正常状态;Hq(X)越小,说明行星齿轮箱运行状态越不稳定,即偏离正常状态,出现异常。Hq(X)的变化能够反映并放大时间序列的微小变化,非线性量子信息熵算法流程如图2所示。
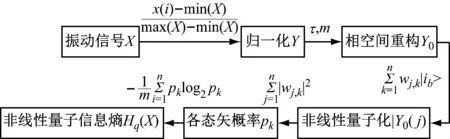
图2 非线性量子信息熵算法流程图
由于非线性量子信息熵在重构分量非线性量子化过程中,充分考虑了其时间序列的实际值,且对各态矢的概率计算尤为精确,因此非线性量子信息熵能够准确反映系统的运行状态,具有很大的优势。
2.3 非线性量子信息熵响应分析
行星齿轮箱齿在出现故障后,将导致对应的振动信号的频率成分、幅值发生变化,且振动信号中存在噪声的干扰,因此分析单行星排齿轮箱齿轮正常、太阳轮局部故障、行星轮局部故障等3种振动仿真信号的非线性量子信息熵,用于说明其作为行星齿轮箱的特征的可行性。
根据文献[9],对于单行星排齿轮箱齿轮正常时振动仿真信号为
(15)
式中:fc为行星架旋转频率,fm为行星齿轮箱的啮合频率,θ为啮合振动初相位。
太阳轮局部故障时振动仿真信号为

(16)

行星轮局部故障时振动仿真信号为

(17)
式中:fp为行星轮局部故障特征频率,A2、B2和φ2、φ2为行星轮故障调幅、调频的幅值和初相位。
根据文献[9],设置仿真信号中各个参数如1所示。

表1 振动仿真信号中各频率值
设置各初相位均为零,即θ=φ1=φ2=φ1=φ2=0,各调制系数A1=A2=B1=B2=0.5,在3种状态的时域信号中添加信噪比为10 dB的高斯白噪声,采样频率设置为5 120 Hz,仿真时间为10 s,此时3种状态的振动时域仿真信号如图3所示。
根据文献[2]中参数优化方法,在相空间重构时,针对3种状态的振动仿真信号,使用互信息法确定延迟时间为τ=1,使用伪近邻法确定嵌入维度为m=3,每1 s(N=5 120)计算一次非线性量子信息熵,共计算20个仿真信号样本,结果如图4所示。由图4可知,行星齿轮箱3种状态振动信号的非线性量子信息熵有明显的差别,初步验证了非线性量子信息熵作为单行星排齿轮箱运行状态特征的有效性。且各状态下振动信号的非线性量子信息熵值波动较小,说明其具有一定的抗噪能力。
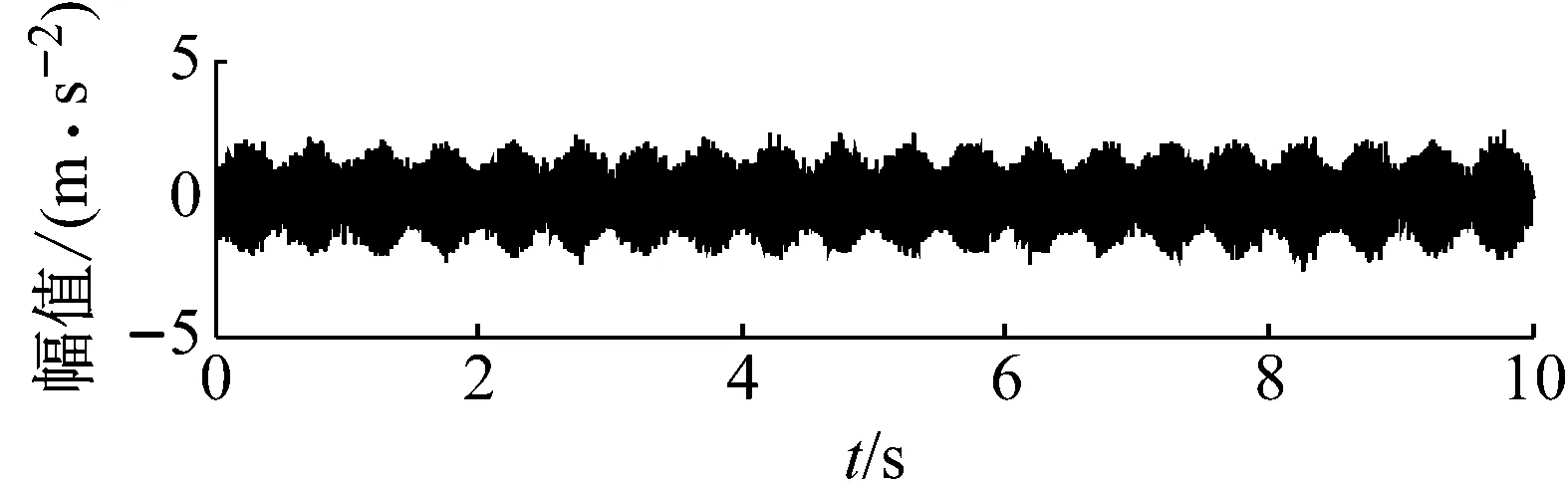
(a) 齿轮正常
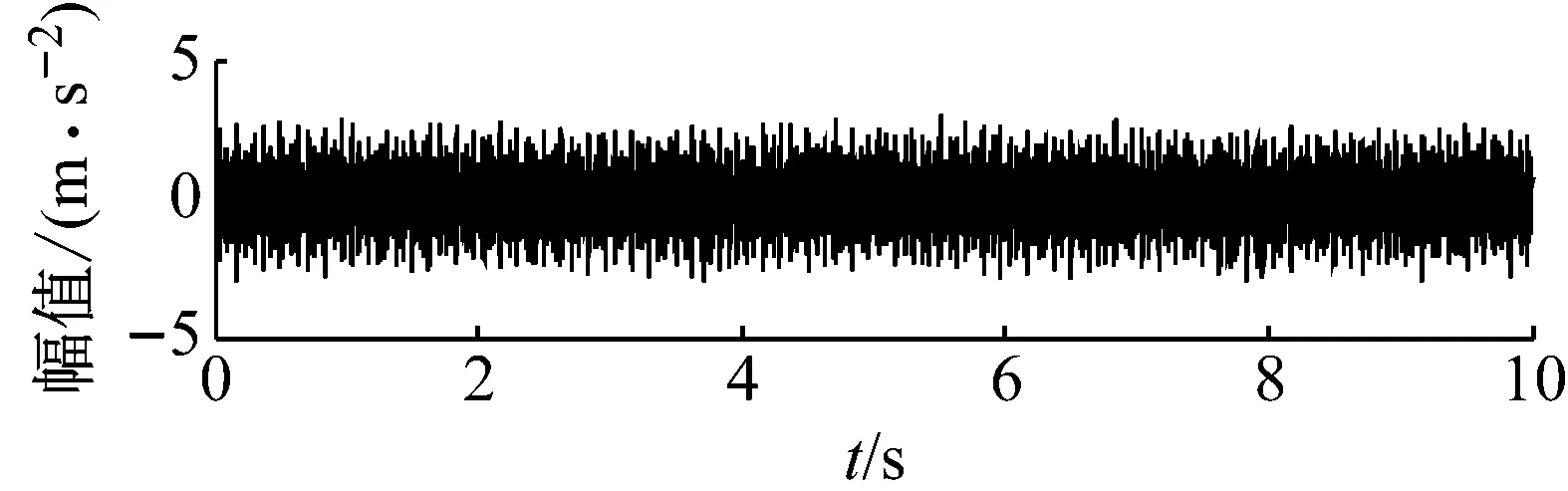
(b) 太阳轮局部故障
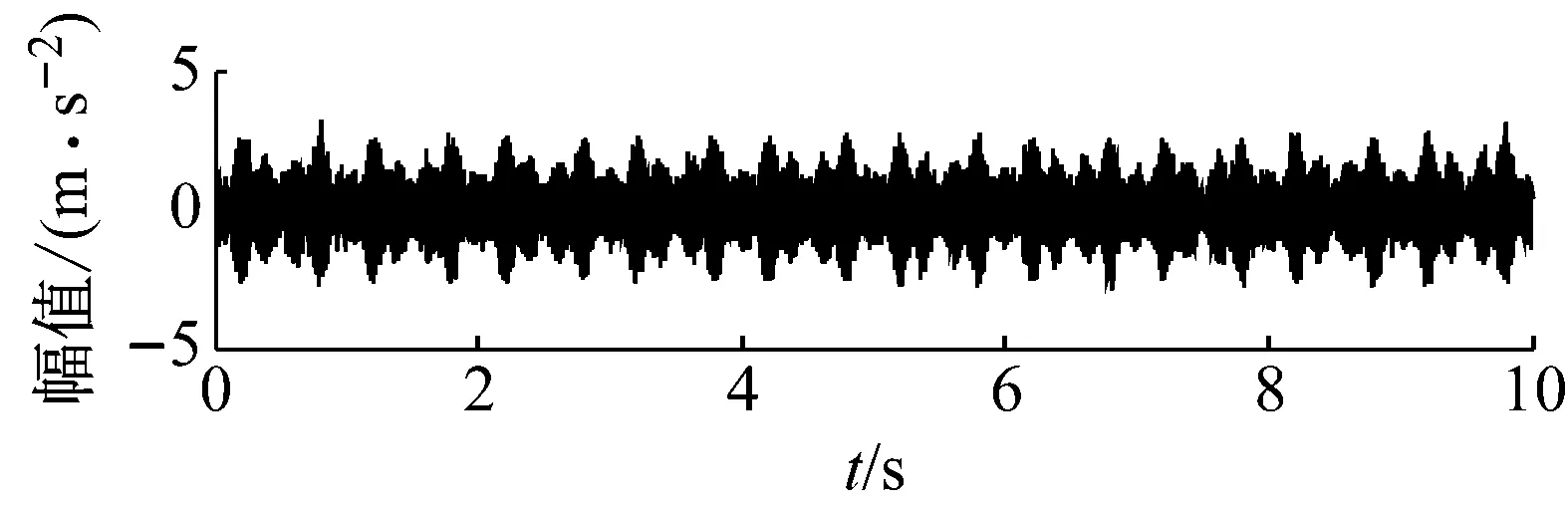
(c) 行星轮局部故障
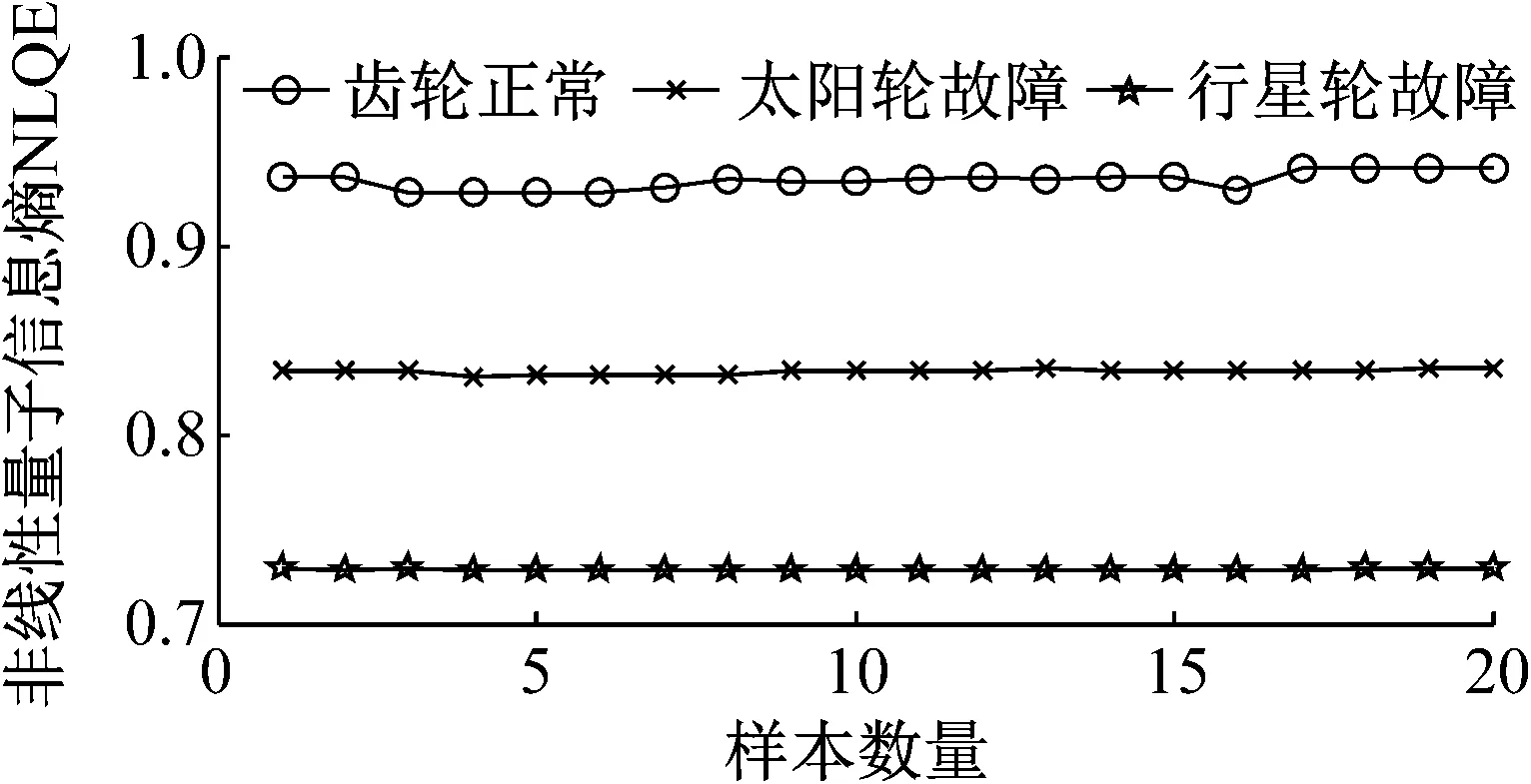
图4 行星齿轮箱3种状态下振动仿真信号的非线性量子信息熵
3 在行星齿轮箱特征提取中的应用
为了进一步检验非线性量子信息熵在复杂行星变速箱特征提取中的应用效果,使用试验台采集振动信号验证其实用性。
3.1 行星变速箱故障模拟试验台
使用行星变速箱齿轮正常、轮齿裂纹故障等多种状态验证非线性量子信息熵的有效性,故障模拟试验台如图6所示。试验台主要由驱动电机、传动箱、行星变速箱、加载电机、转速转矩仪等关键部件组成,其中行星变速箱主要由三个行星排以及多个定轴传动组成。在实际运行中,通过液压油路控制其内部离合器和制动器的分离和结合,从而实现行星变速箱不同的传动比。行星变速箱三档时,故障模拟试验台动力传递原理如图6所示。其内部的复杂结果导致了采集到的振动信号异常复杂。
试验中,振动传感器粘贴在行星变速箱的箱体上,采样频率设定为20 kHz,试验共进行了5种状态下的数据采集,分别为齿轮正常、K1小行星轮裂纹、K1大行星轮裂纹、K2行星轮裂纹、K3太阳轮裂纹。驱动电机输入转速为1 500 r/min;两侧负载电机加载为900 N·m。每个样本采集1s,每种状态采集50个样本,共采集250个样本。
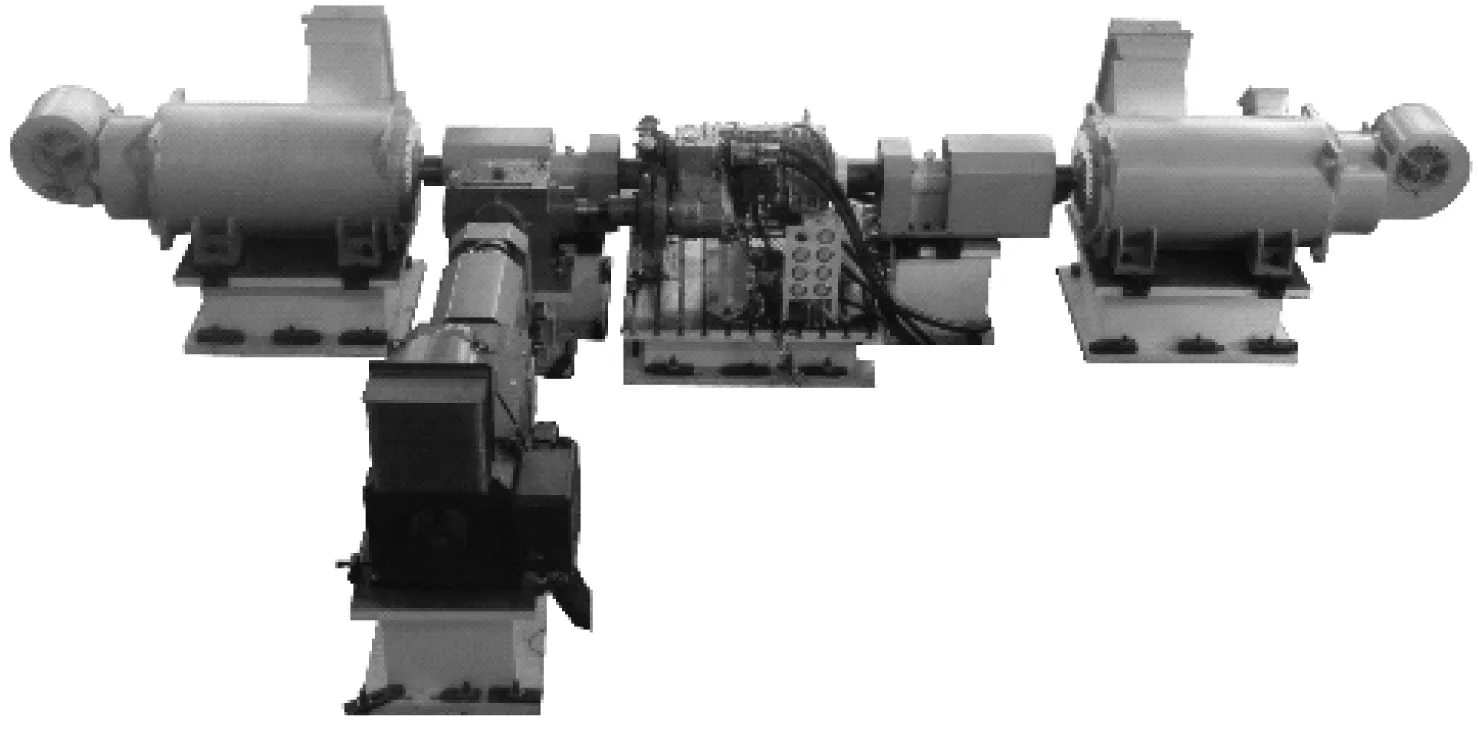
图5 行星变速箱试验台
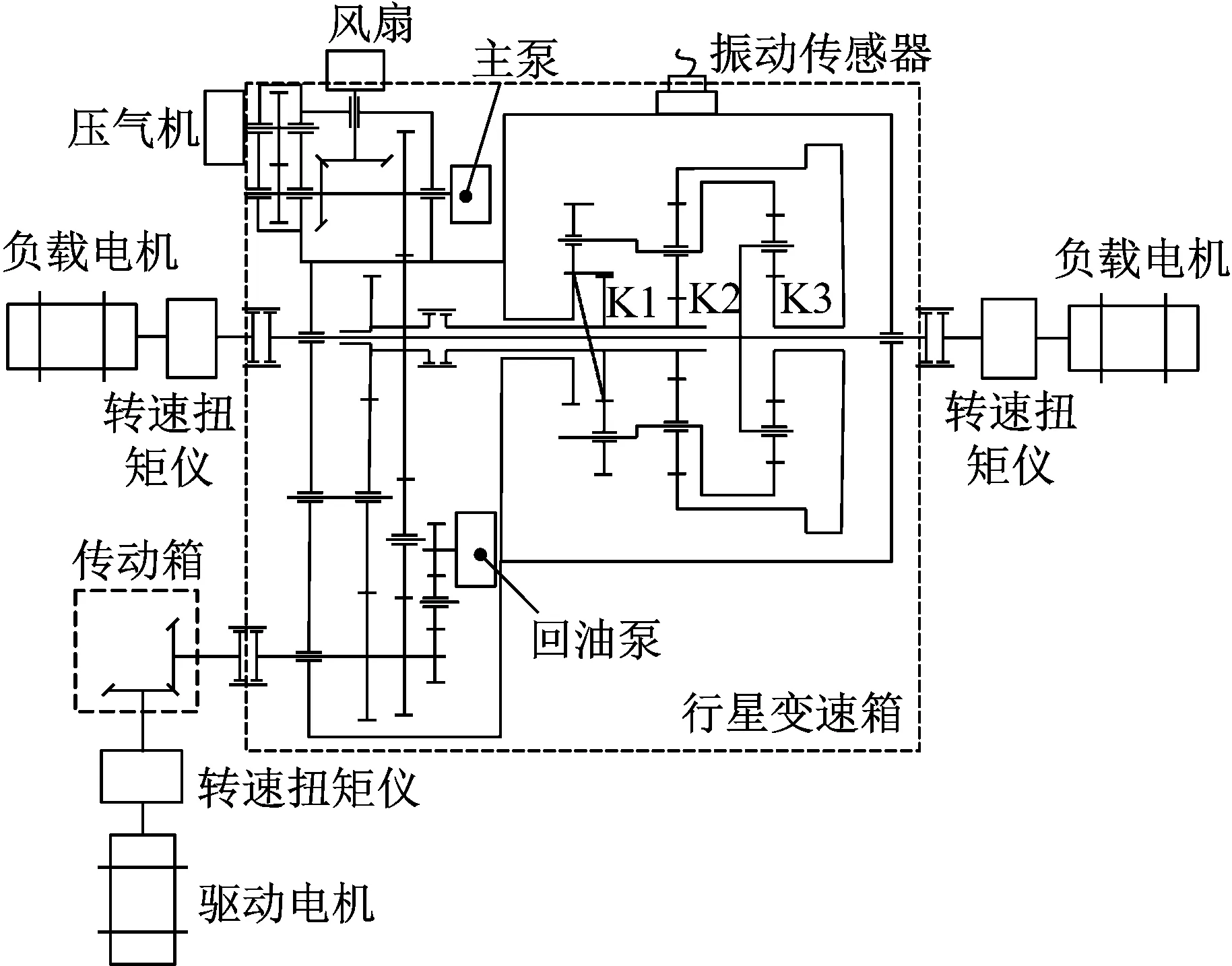
图6 行星变速箱试验台原理图
3.2 试验数据分析
在三档时,5种状态采集到振动信号时频如图7所示。由此5种状态的频域波形可知,其各状态下的频率成分尤其复杂,且相差甚微,故障信息被淹没,仅根据此时频域分析很难判断行星齿轮箱的运行状态。
使用本文提出的非线性量子信息熵对5种状态的振动信号提取特征。根据文献[2]中参数优化方法,针对此5种状态,在相空间重构时,使用互信息法确定延迟时间为τ=1,使用伪近邻法确定嵌入维度为m=3,计算每个样本(L=20 000)的非线性量子信息熵,计算结果如图8所示。由图可知,非线性量子信息熵能够很好的分辨5种状态的信号,且稳定性好,具有很好的效果。
3.3 与时频熵、样本熵结果对比
Fig.7 Time and frequency domain waveforms of five types of planetary transmission gearbox vibration signals
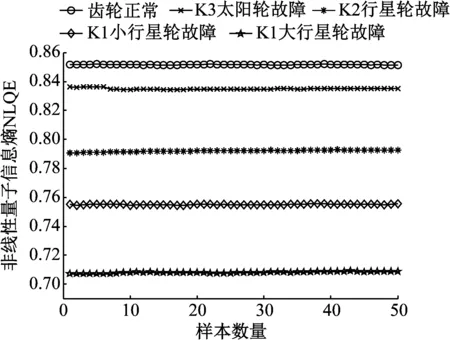
图8 行星变速箱5种状态下振动信号的非线性量子信息熵
为了进一步说明非线性量子信息熵在复杂行星变速箱特征提取中的优越性,对5种状态求其时频熵和样本熵,计算结果如图9、图10所示。由图可知,时频熵、样本熵对复杂行星变速箱运行状态提取的特征值波动较大,且存在交叉,并不能作为判断行星变速箱运行状态的有效特征。
3.4 结果分析
通过前文分析,针对行星变速箱不同运行状态的振动信号,非线性量子信息熵具有更好的分析能力,根据图8所示,齿轮正常时振动信号具有最大的非线性量子信息熵值,说明其振动信号对应的各态矢分布相对更均匀,而在出现裂纹故障后,由于裂纹故障产生的频率变化及冲击对其振动信号有较大的影响,造成某些态矢出现的概率增加,某些态矢出现的概率减少,态矢分布变化,导致其非线性信息熵值减小。行星变速箱在运行中振动信号保持一定的统计规律,各状态下的态矢概率趋于稳定,因此各状态下的非线性量子信息熵保持稳定,且不同状态的非线性量子信息熵不同。因此,非线性量子排列熵可作为判断行星变速箱运行状态的特征。
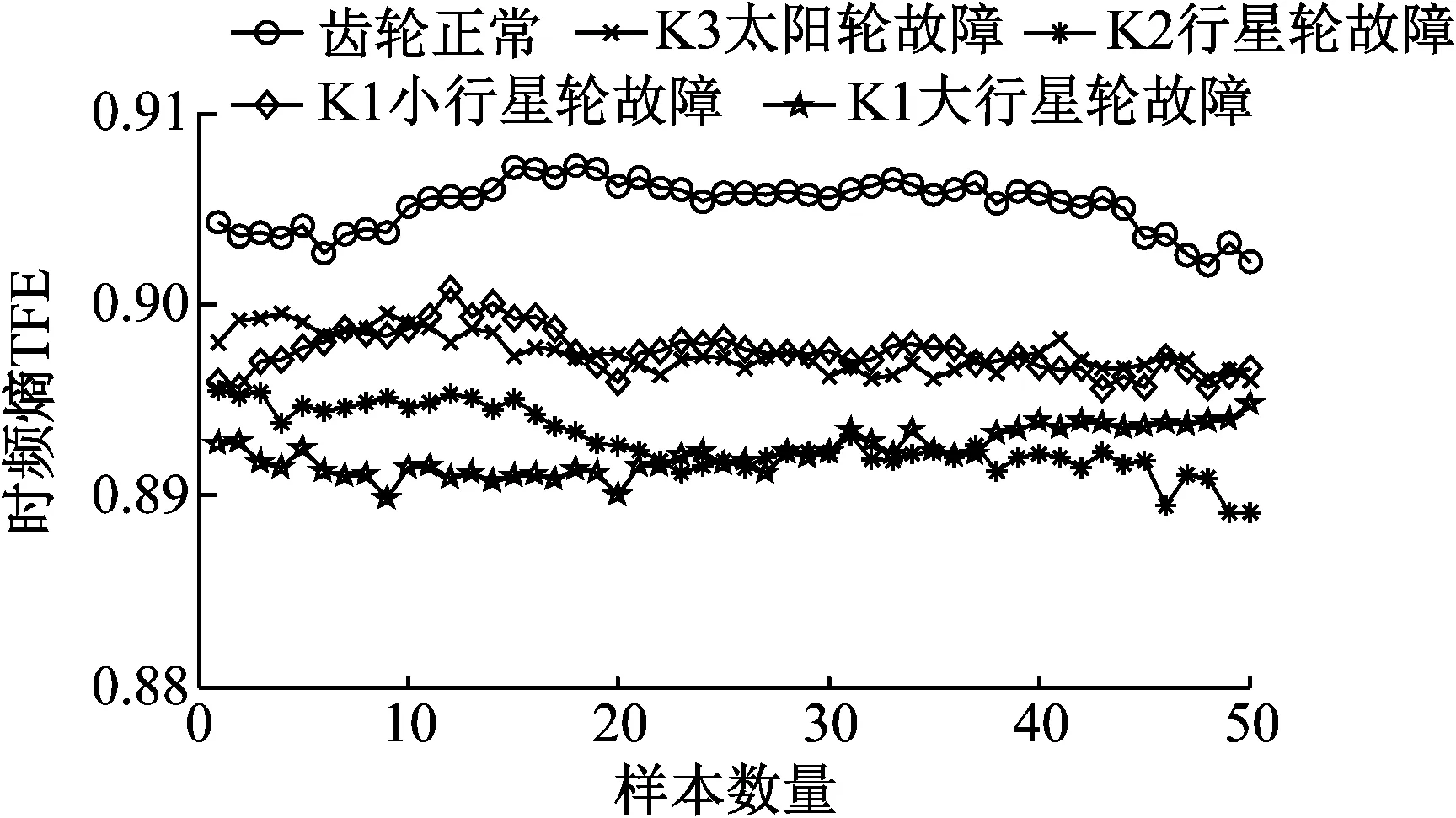
图9 5种状态下行星变速箱振动信号的时频熵
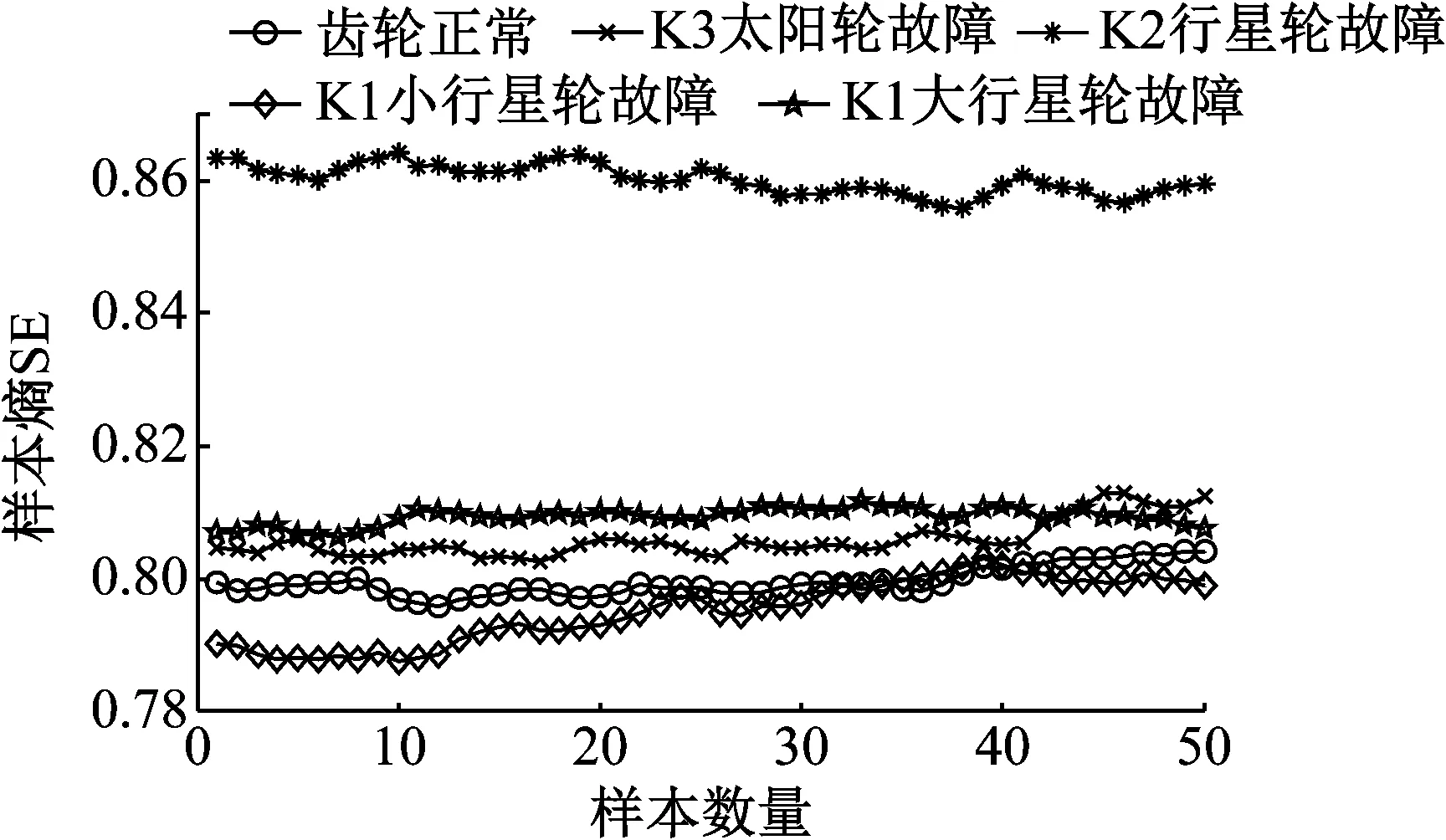
图10 5种状态下行星变速箱振动信号的样本熵
4 结 论
本文结合量子理论和信息熵,提出了一种特征计算的新方法-非线性量子信息熵,并将其用于行星变速箱的特征提取,判断行星齿轮箱的运行状态。得出如下结论:
(1) 非线性量子信息熵作为一种新的特征提取方法,其原理简单、计算快捷。由于该算法在计算各态矢系数时考虑了实际值,在原理上比排列熵更有优势,通过仿真和试验数据分析表明,非线性量子信息熵能够有效提取行星变速箱运行状态特征。
(2) 通过与时频熵和样本熵的对比可知,针对复杂结构行星变速箱振动信号的特征提取,非线性量子信息熵更为有效。
(3) 非线性量子信息熵作为全新的特征提取方法,目前尚处于研究阶段,对于算法中的原始信号归一化方法、延迟时间、嵌入维度等参数对其计算结果的影响还有待进一步研究。
(4) 量子理论作为极具变革的理论,将其引入到振动信号分析中将发挥其巨大的潜力,也必将为振动信号分析方法提供更多新思路。
