利用GPS数据标校水汽辐射计的方法研究∗
2018-12-20窦世标宋淑丽周伟莉刘智敏陈钦明郑为民陈后财
窦世标 宋淑丽 周伟莉 刘智敏陈钦明 郑为民 陈后财
(1 国家测绘地理信息局第三大地测量队成都610100)
(2 中国科学院上海天文台上海200030)
(3 山东科技大学测绘科学与工程学院青岛266590)
(4 南京信息工程大学电子信息与工程学院南京210044)
1 引言
对流层延迟,即未被极化的大气延迟是空间大地测量技术中的一项重要误差源,包括对流层干延迟和湿延迟.湿延迟主要是大气中的水汽对信号的延迟造成的,在模型化对流层对GPS信号影响过程中,湿延迟是最难量化的部分.水汽是大气的重要组成成分,在天气预报、气候变化研究、辐射传输等大气研究中具有重要的地位[1−2].为了获取高精度对流层水汽测量结果,相继开发了一系列技术和手段,主要包括WVR[3](Water Vapor Radiometer)、无线电探空仪[4](Radiosonde)、AERONET[5](Aerosol Robotic Network)、GNSS[6](Global Navigation Satellite System)、MODIS[7](Moderate-Resolution Imaging Spectroradiometer)等.为了评定和验证不同技术间获取的对流层总延迟、湿延迟、大气可降水量之间的符合精度,Behrend等[8]在欧洲的3个并址站对数值天气预报模型(MM5)与VLBI、GPS、WVR获取的对流层湿延迟进行了对比分析,研究表明各技术间获取对流层湿延迟(Zenith Wet Delay,ZWD)的相关系数在75%–95%之间;RMS(Root Mean Square)在±1.3–1.6cm之间.Yeh等[9]利用WVR和GPS在不同的天气条件下获取的对流层湿延迟进行了对比,在晴天、小雨、中雨、大雨的情况下,处于平原地区的测站获取的ZWD均值分别为0.31 m、0.36 m、0.38 m和0.40 m.GPS/ZWD与WVR/ZWD的差值范围为1.31–2.57 cm,相关系数R为89%–93%.Haefele等[10]通过研究发现GPS与WVR测量得到的对流层总延迟ZTD差值在4.5–5.3 mm之间.Liou等[11]在近热带地区对GPS/PWV(Precipitable Water Vapor)与WVR/PWV的研究发现二者之间的RMS值取决于大气中的水汽含量.根据Liu等[12]通过Radiosonde、AERONET、GPS与WVR的对比研究发现,利用GPS/ZWD进行回归分析是获取WVR/ZWD最可靠且最合适的技术手段.
本文详细讨论了北京、上海、昆明、乌鲁木齐4个GPS与WVR并址站WVR数据的预处理方法,分析了影响水汽辐射计测量精度的因素.利用2015–2016年的4个并址站的GPS和WVR数据,验证水汽辐射计数据的稳定性与可靠性,通过GPS/ZWD对WVR/ZWD进行了对比标校分析.
2 水汽辐射计与GPS获取对流层延迟原理
2.1 水汽辐射计获取对流层湿延迟原理
本文使用的水汽辐射计(图1)由中国电子科技集团公司第22研究所(CETC-22)研制,通过23.8 GHz和31.2 GHz两通道大气辐射亮温,可监测路径上大气积分水汽含量和液态水总量,并能提供大气延迟.通过测量云液态水对不透明大气光谱的贡献可以得出有限的云液态水[12].
水汽辐射计获取大气中的水汽含量、液态水含量、湿延迟都是通过亮温来计算得到的[13].亮温是水汽辐射计的直接测定量,根据大气辐射传输方程,水汽辐射计向上观测时,它的物理意义相当于该辐射强度的黑体辐射的温度[14].在40 GHz以下频率,大气透过率主要由水汽和液态水含量所决定,水汽辐射计所测大气辐射亮度温度值与大气中水汽含量和液态水总含量成线性关系,本文水汽辐射计获取对流层湿延迟公式如下[15]:


式中,TB1,2为水汽辐射计双通道测量的大气辐射亮温;k为常数;Tm由地面大气温度采用经验公式计算;Ts是宇宙背景辐射亮度温度;α1和α2是大气吸收系数;Wm为权函数,在水汽辐射计最佳工作频率可视为与高度无关的常数;s为积分路径;f1和f2为水汽辐射计的工作频率.

图1 SHAO站配备液氮黑体定标装置的水汽辐射计Fig.1 WVR at SHAO station with a calibration device of the liquid nitrogen blackbody
2.2 GPS获取对流层湿延迟原理
大气延迟一般泛指从地面到50 km高度的非电离大气对电磁波的折射,即中性延迟.由于折射的80%发生在对流层,又称为对流层延迟.对流层大气延迟在天顶方向上的总延迟量约为2.5 m,与测站所在地区的纬度、海拔等因素有关.对流层延迟可分为静力学延迟(Zenith Hydrostatic Delay,ZHD)和湿延迟两部分[16].静力学延迟又称干延迟,与测站地面气压和坐标有关,湿延迟是大气湿度和温度的函数.相对于湿延迟而言,干延迟更容易模型化,并且能够获得很好的精度,如Saastamoinen模型[17].湿延迟则取决于GPS信号穿过的大气中的水汽含量.
在GPS数据处理中,采用GPS精密轨道和钟差,对流层总延迟ZTD可以作为待求参数与测站位置等一起求取[18].对流层干延迟ZHD、对流层湿延迟ZWD[16−17]可采用下式求取:式中,P为测站表面大气压,单位为hPa;φ为测站纬度,以◦为单位;H为测站大地高度,单位为km.

3 GPS/ZWD与WVR/ZWD对比标校分析
水汽辐射计在进行观测前需要先进行定标,本文对水汽辐射计在天气晴好条件下8:00进行天顶定标.水汽辐射计对周围环境的变化非常敏感,例如温度变化、云液水含量变化、电磁干扰、水汽凝结以及降水的发生等.因此,在分析水汽辐射计湿延迟之前需要将因外界环境变化引起的异常数据剔除.对于BJMY、YNKM、URUM各站的水汽辐射计获取对流层湿延迟,首先将液态水含量>0.05 mm的数据剔除,目的是为了消除降水在水汽辐射计天顶罩残留以及降水过程中空气中含有的液态水造成的数据异常.因SHAO站降水较多,为保证数据质量和利用率,将液态水含量>0.5 mm的数据剔除.需要说明的是,对BJMY、YNKM、URUM站设置液态水含量>0.05 mm的数据剔除、SHAO站设置液态水含量>0.5 mm的数据剔除是在数据预处理过程中经过反复试验制定的阈值,剔除后的WVR/ZWD与GPS/ZWD除系统差外,在某一时刻两者无明显较大异常差值,且具有较好的变化趋势一致性.其次,对消除液态水之后的数据每5 min求均值,当湿延迟与均值的差值>3σ时认定为野值,在以下的分析过程当中亦将其剔除,剔除野值后的数据每5 min取均值与GPS/ZWD进行对比标校分析.依据上述方法剔除野值后的数据利用率随doy(day of year)的分布如图2所示,通过对4个GPS、WVR并址站的ZWD分析发现BJMY站水汽辐射计数据利用率较差,仅为48.38%,最高的为SHAO站84.64%,YNKM站为73.88%,URUM站为76.50%.
通过观察GPS/ZWD与WVR/ZWD数据,两者不仅有整体偏差,而且其数据幅度范围也略有不同.为了便于进行其整体比较及线性分析,需要以某一数据为参考,对另一个数据进行标校.本文将GPS/ZWD作为参考值,对WVR/ZWD数据进行标校.首先选取GPS/ZWD及WVR/ZWD数据连续的部分,进行3次样条插值,获得同一时间序列的ZWD观测值;对两种手段获取的ZWD插值结果进行线性拟合,获得其系统偏差与幅度比例;通过系统偏差与幅度比例系数,对WVR/ZWD进行重映射后得到校正后的数据WVR/ZWD′.经过以上处理后,可见标校后的数据WVR/ZWD′与GPS/ZWD数据间的系统偏差BIAS完全消除,同时STD(Standard Deviation)降低明显,且保证了WVR/ZWD与GPS/ZWD数据间的相关性.
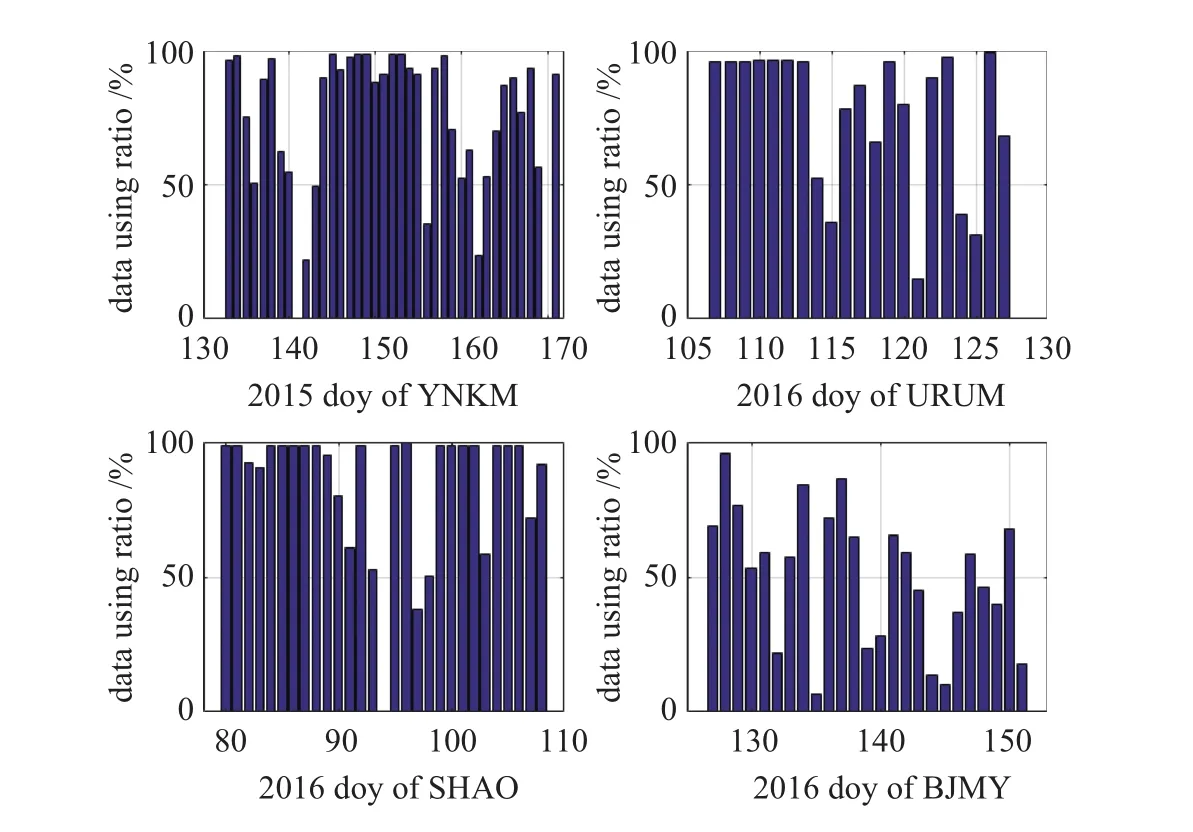
图2 4台站(YNKM、URUM、SHAO、BJMY)水汽辐射计获取对流层延迟数据利用率Fig.2 The WVR/ZWD data using ratio of 4 stations(YNKM,URUM,SHAO,and BJMY)
3.1 YNKM站
云南昆明站水汽辐射计在2015年doy=131进行了天顶定标(利用水汽辐射计内置黑体常温定标,下同),定标后持续观测到doy=171,共40 d.YNKM站GPS/ZWD数据在doy=139、140、146、151、152、154、155、158-162期间缺失,WVR/ZWD数据在doy=141、170期间缺失,故实际对比天数共26 d.
图3(a)为利用GPS/ZWD标校WVR/ZWD前两者时间序列,从图中可以看出GPS/ZWD较WVR/ZWD整体偏高,但两者存在较好的对应变化关系,且两者之间存在较为明显的系统偏差;图3(b)为利用GPS/ZWD标校WVR/ZWD后两者时间序列,标校后两者的变化趋势几乎完全吻合.标校前GPS/ZWD与WVR/ZWD间的整体相关系数R=97.01%,BIAS=95.68 mm,STD=8.55 mm;标校后STD=7.97 mm.标校后的WVR/ZWD′与GPS/ZWD间的BIAS消除,且STD减小(图3).
3.2 URUM站
新疆南山站水汽辐射计在2016年doy=106进行天顶定标,定标后持续观测到doy=127共计21 d,在此期间ZWD的值在100–450 mm之间浮动.
图4(a)为利用GPS/ZWD标校WVR/ZWD前两者时间序列,从图中可以看出GPS/ZWD较WVR/ZWD整体偏高,但两者有较好的对应变化关系,且两者之间存在较为明显的系统偏差;图4(b)为利用GPS/ZWD标校WVR/ZWD后两者时间序列,标校后两者的变化趋势几乎完全吻合.标校前GPS/ZWD与WVR/ZWD间的BIAS=121.62 mm,STD=17.19 mm,R=90.83%;标校后STD=12.91 mm.标校后的数据WVR/ZWD′与GPS/ZWD BIAS消除,且STD明显减小(图4).

图3 YNKM站GPS/ZWD与WVR/ZWD标校前(a)后(b)时间序列对比图,doy=131–171Fig.3 The comparison diagram of time series between GPS/ZWD and WVR/ZWD of YNKM station before(a)and after(b)calibration,doy=131–171

图4 URUM站GPS/ZWD与WVR/ZWD标校前(a)后(b)时间序列对比图,doy=107–127Fig.4 The comparison diagram of time series between GPS/ZWD and WVR/ZWD of URUM station before(a)and after(b)calibration,doy=107–127
3.3 SHAO站
上海站水汽辐射计在2016年doy=79进行了天顶定标,定标后持续观测到doy=108共29 d,因WVR/ZWD在doy=94 d缺失,故实际分析数据共28 d,其中共有21 d的R超过了90%,在此期间ZWD的值在20–320 mm之间浮动.
图5(a)为利用GPS/ZWD标校WVR/ZWD前两者时间序列,从图中可以看出WVR/ZWD较GPS/ZWD整体偏高,且变化幅度较大,说明水汽辐射计对湿延迟变化更为敏感,但两者有较好的对应变化关系,且两者之间存在较为明显的系统差;图5(b)为利用GPS/ZWD标校WVR/ZWD后两者时间序列,标校后两者的变化几乎完全吻合.标校前GPS/ZWD与WVR/ZWD间的BIAS= –81.40 mm,STD=46.27 mm,R=98.18%;标校后STD=10.97 mm.标校后的数据WVR/ZWD′与GPS/ZWD BIAS消除,且STD明显减小(图5).
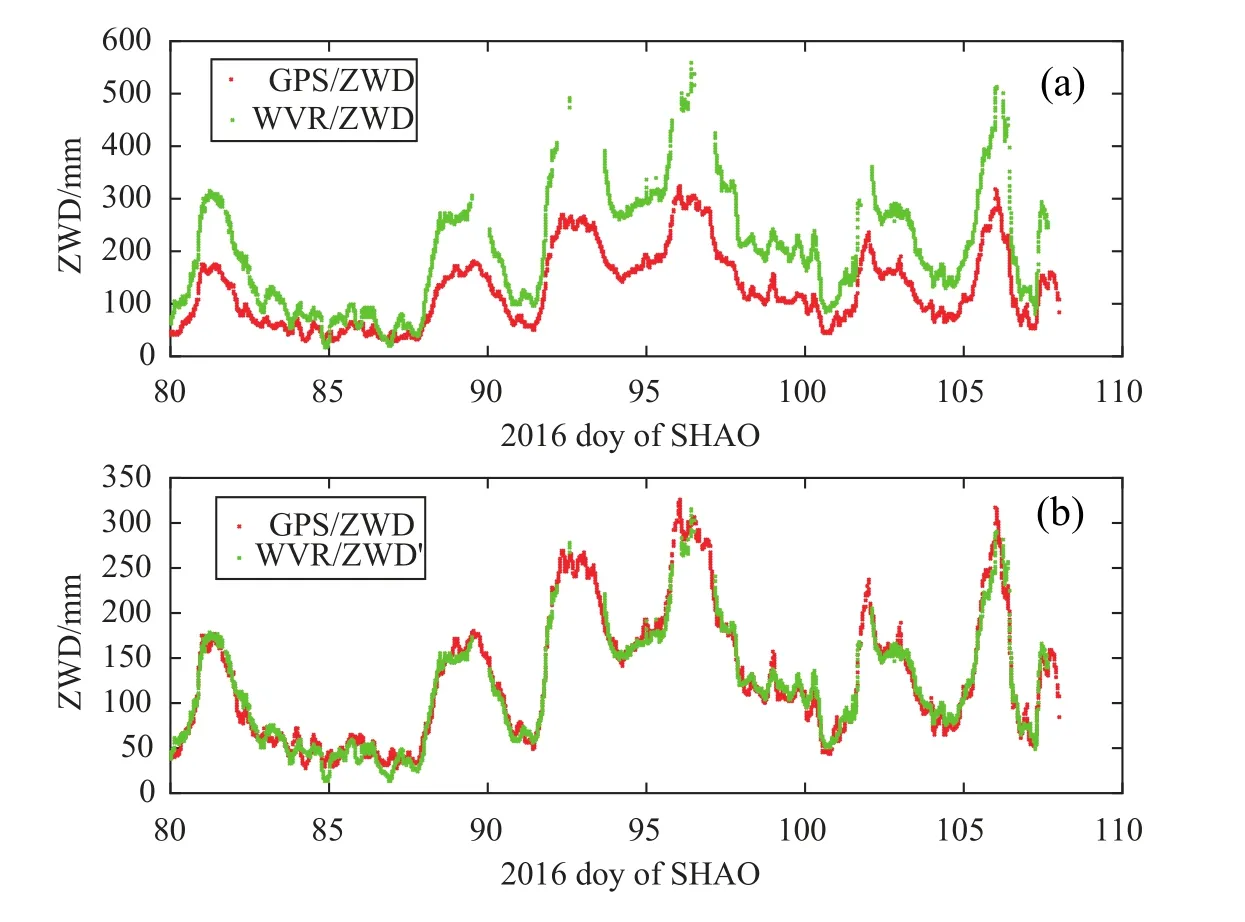
图5 SHAO站GPS/ZWD与WVR/ZWD标校前(a)后(b)时间序列对比图,doy=80–108Fig.5 The comparison diagram of time series between GPS/ZWD and WVR/ZWD of SHAO station before(a)and after(b)calibration,doy=80–108
3.4 BJMY站
北京密云站水汽辐射计在2016年doy=126进行了天顶定标,分析的数据包括doy=127–152共26 d的数据,由于GPS/ZWD数据在doy=131、132和147期间缺失,实际对比数据共23 d,在此期间ZWD的值在30–300 mm之间浮动.图6(a)为利用GPS/ZWD标校WVR/ZWD前两者时间序列,从图中可以看出WVR/ZWD较GPS/ZWD整体偏高,且变化幅度较大,说明水汽辐射计对湿延迟变化更为敏感,但两者具有较好的对应变化关系,且两者之间存在较为明显的系统差;图6(b)为利用GPS/ZWD标校WVR/ZWD后两者时间序列,标校后两者的变化几乎完全吻合.标校前GPS/ZWD与WVR/ZWD间的BIAS=–11.95 mm,STD=24.62 mm,R=86.61%;标校后STD=17.55 mm.标校后的数据WVR/ZWD′与GPS/ZWD BIAS消除,且STD明显减小(图6).
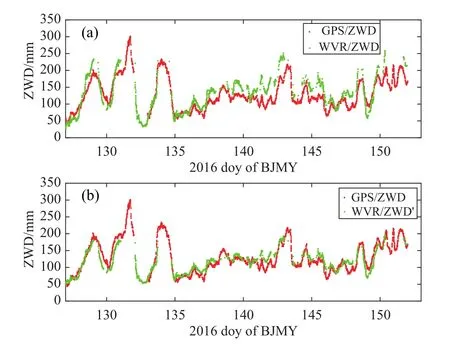
图6 BJMY站GPS/ZWD与WVR/ZWD标校前(a)后(b)时间序列对比图,doy=127–152Fig.6 The comparison diagram of time series between GPS/ZWD and WVR/ZWD of BJMY station before(a)and after(b)calibration,doy=127–152
3.5 统计结果
从表1可以看出,WVR/ZWD与GPS/ZWD之间STD较大,最大的为SHAO站46.27 mm,最小的为YNKM站8.55 mm;从RMS和BIAS可以看出,除BJMY站之外,其余3个台站的值均较大,最大值出现在URUM站,分别为122.92 mm和121.62 mm;4台站R均超过了85%,最高的为SHAO站,达到了98.18%.
结合表1、2可以得出,标校精度与4台站WVR/ZWD和GPS/ZWD之间的相关性具有直接关系,相关性越高,标校效果越好.对WVR/ZWD数据稀疏两倍处理后的标校获取的STD与稀疏处理前无明显变化,这与GPS/ZWD采样率低(5 min),WVR/ZWD采样率较高(0.5 s),对剔除粗差后WVR/ZWD进行稀疏处理仍有足够的数据量参与标校有关.

表14 台站标校前GPS与WVR相对精度Table 1 Accuracy index of four stations before calibration including RMS,BIAS,and STD
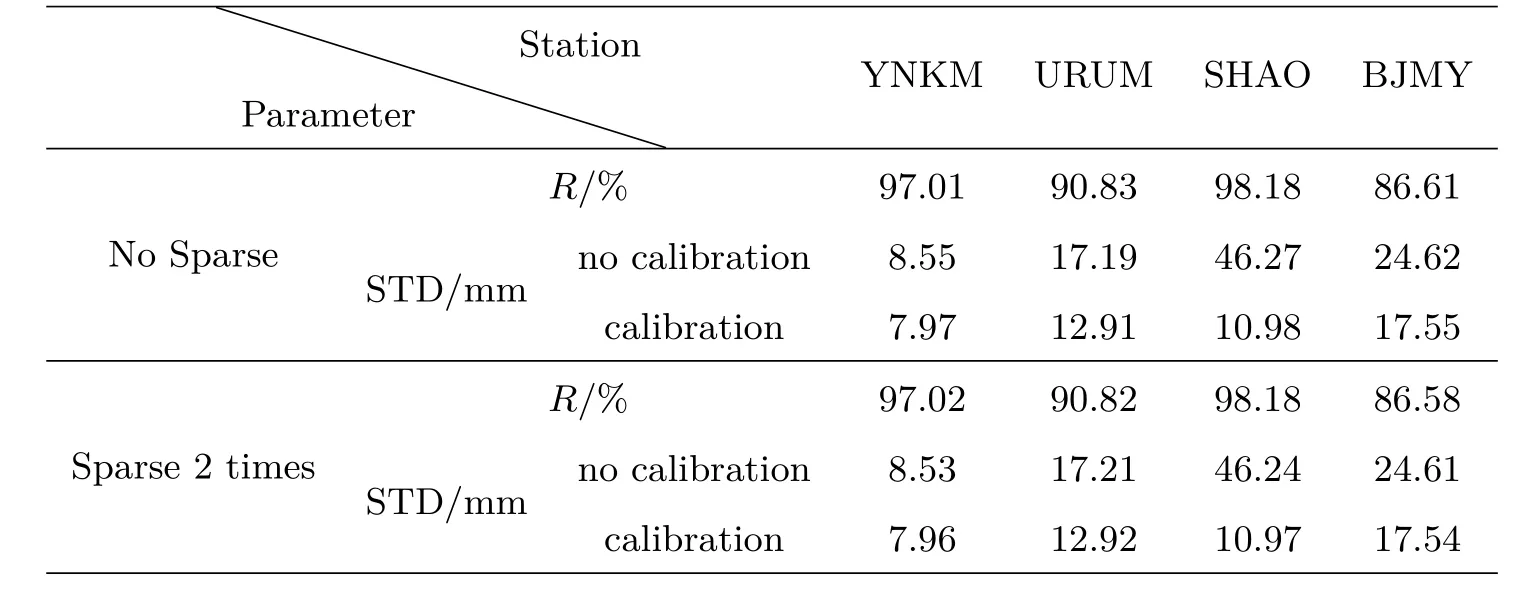
表24 台站WVR/ZWD数据稀疏前后及标校前后精度对比Table 2 Comparison of STD before and after WVR/ZWD sparseness and calibration of four stations
4 结论
通过对YNKM、URUM、SHAO、BJMY 4个并址站,利用GPS/ZWD对WVR/ZWD进行对比标校分析发现GPS/ZWD与WVR/ZWD之间相关性较好,但存在明显的系统差,且系统差较大,与观测天气条件和仪器自身差异有关,特别是对流层湿延迟波动较大时WVR/ZWD变化与GPS/ZWD之间存在明显异常.
经GPS/ZWD标校后,两者之间的STD均明显减小,获取的WVR/ZWD精度大幅提高.两者之间的相关系数越高,标校效果越好.因此,为保证利用GPS/ZWD标校WVR/ZWD的精度,需要提升水汽辐射计自身性能,减少WVR/ZWD野值,保证WVR/ZWD数据的连续性,提高两者之间的相关性.
致谢 感谢国家天文台、新疆天文台、云南天文台和上海天文台在水汽辐射计维护及数据上提供支持.感谢上海天文台付乃锋博士对本文提供帮助.
