基于三维激光扫描技术的建筑物模型构建的研究
2018-12-20耿黎娜朱兰艳李启萌张毕祥
耿黎娜,朱兰艳*,李启萌,张毕祥
基于三维激光扫描技术的建筑物模型构建的研究
耿黎娜1,朱兰艳1*,李启萌2,张毕祥1
(1. 昆明理工大学国土资源工程学院,云南 昆明 650093;2. 云南省港航投资建设有限责任公司,云南 昆明 650051)
三维激光扫描(Terrestrial Laser Scanning, TLS)技术作为一种全自动高精度立体扫描技术,是继GPS空间定位之后的有一项新兴测绘技术。本文首先对三维激光扫描仪的测距和工作原理进行阐述,然后运用TLS技术对某建筑物进行扫描和建模处理。其中,着重对基于点云数据构建精细化建筑三维模型的技术要点进行探索。此外,还对TLS技术外业扫描和内业数据处理的全过程进行探索和总结。最后,对TLS技术相较于传统测量技术的优势进行探讨,并对TLS技术的应用前景进行了展望。
TLS技术;点云处理;建筑物;三维建模
0 引言
三维激光扫描是上世纪九十年代中期开始出现的一项全新的测绘技术,是一种非接触、自动化、高精度的数字化三维立体扫描测绘技术。是继GPS空间定位技术之后的又一项新的获取空间数据的重要测绘技术手段[1-3]。它可以实现各种大型的,复杂的、标准的与非标准的实体或实景三维数据的采集和处理,之后快速建立出目标物体的三维立体模型及点、线、面、模型等各种制图综合的数据,它将使测绘服务能力与水平、数据的获取方法、数据处理方法等进入到一个新的发展水平[4-6]。传统测量是单点采集数据,而三维激光扫描测量技术可以快速连续地获取目标地物表面的点云数据,获取的信息量也从单点的空间位置扩展到目标地物表面的纹理和颜色信息[2]。同时三维激光扫描仪小型便捷、安全稳定、可操作性强,且获取数据精确高效,利用地面三维激光扫描技术进行测绘工作时,可以在任何复杂的地形地貌进行扫描测绘操作,也可以应用在不受光线影响的扫描测绘工作之中,快速获取数据建立详尽的三维立体模型[7-8]。目前,它主要应用于三维立体建模、变形监测、地形测绘、虚拟现实等方面[9-12]。三维激光扫描技术又被称为实景复制技术,它通过快速完整地获取建筑物的三维点云数据,经处理生成建筑物的精细化三维模型,能够最大程度地重构建筑物的特征信息[13-14]。因此在数字化文物保护、数字城市等领域也有着广泛用途。
本文采用的三维激光扫描仪是FARO120,以本校区科技实验楼为例,结合三维激光扫描仪的工作原理,探讨利用三维激光扫描仪从数据获取、数据处理到建筑物模型构建的方法。
1 TLS设备与点云数据处理
1.1 三维激光扫描仪测量原理
三维激光扫描仪依据测量方式和原理不同,主要分为三种:基于脉冲式、基于相位差和基于三角测距。三维激光扫描测量系统包括:内置或外置GPS接收机、姿态测量装置(INS)、扫描激光测距仪和扫描成像仪[15],见图1。GPS接收机主要用于获取三维成像仪的精确三维位置;姿态测量装置(INS)用于测量三维成像仪的姿态参数;扫描激光测距仪用来精确测定成像中心到激光采样点的距离,利用该距离根据几何原理可以计算出激光采样点的三维坐标;扫描成像仪同步获取扫描图像。扫描成像仪和扫描激光测距仪在硬件上共用一套扫描光学系统而组成扫描激光测距即成像组合传感器(AL-Hi),从而保证激光采样点和图像上的像元点严格匹配,在获取采样点图像的同时还可以获取该点到成像仪的距离。它是利用激光测距原理,记录待测物体表面密集点的三维坐标、纹理信息等,快速构建出待测目标的三维模型。

图1 三维激光扫描测量系统
1.2 TLS点云数据处理
利用三维激光扫描仪获取目标地物的点云数据并构建三维数字模型,需要经过一系列的数据处理过程。其中,点云数据的预处理过程主要包括三个步骤:多站数据配准、点云滤波去噪和点云空洞修复。地面三维激光扫描仪获取的数据是以测站为中心的局部坐标系,不同测站获取的点云坐标系不统一。在扫描测量过程中布设了多个测站,产生多组散乱的点云数据,因此,需要对多站扫描的点云数据进行配准处理,点云配准的目的是将多站散乱的点云数据统一到同一个坐标系下。再使用控制点配准,将点云配准到控制网坐标系下。由于在复杂环境中的扫描工作易受外界因素的影响,如地表植被、移动的车辆、行人和其他构筑物等非目标地物的存在和对目标地物的遮挡,以及人为操作的影响,导致扫描的原始点云数据中存在着大量冗余点和某些关键部位的数据缺失,因此在数据预处理中需要对原始数据进行滤波去噪和空洞修复处理。滤波去噪主要是剔除点云数据中的非目标点和冗余点,以保证目标地物建模的准确性。再者,由于点云本身具有离散性,会导致构建的模型存在一些瑕疵和缺陷,需要在多边形阶段对其进行修复等操作,以保证得到较准确完整的实物数字模型。
2 TLS点云数据构建建筑3D模型
本实验选取的实例为某校科技实验楼的扫描建模,楼体正面朝东,占地4300 m2。楼体主要由四层,五层,六层三个部分构成的组合型复杂建筑物。结合工作生产实践,拟定出基于地面三维激光扫描仪的建筑物扫描及三维模型构建的工作流程,总技术路线图如图2所示。本次虚拟建筑物模型构建采用法如Focus3D 120三维激光扫描仪进行扫描工作和系统软件作为数据处理主要软件。

图2 技术路线图
2.1 外业扫描
2.1.1 扫描技术方案设计及准备
在获取建筑物的激光点云数据前,首先对建筑物及周围环境进行现场踏勘,制定扫描技术方案,确定扫描的测站和标靶的合适位置以及其数量,确定扫描路线,保证各扫描测站所获取的数据能覆盖待测建筑物,同时在要合理控制测站数,以减少原始数据量过多造成冗余,影响内业处理的效率。
依据扫描的精度和目的要求,结合目标建筑物的结构,拟采用标靶(公共点)数据拼接的方式,将多站扫描的数据拼接起来,首先进行全站仪控制测量,全站仪控制网测站设置为6个。计算后得出控制点点位坐标如表1所示。
表1 标靶控制网点位
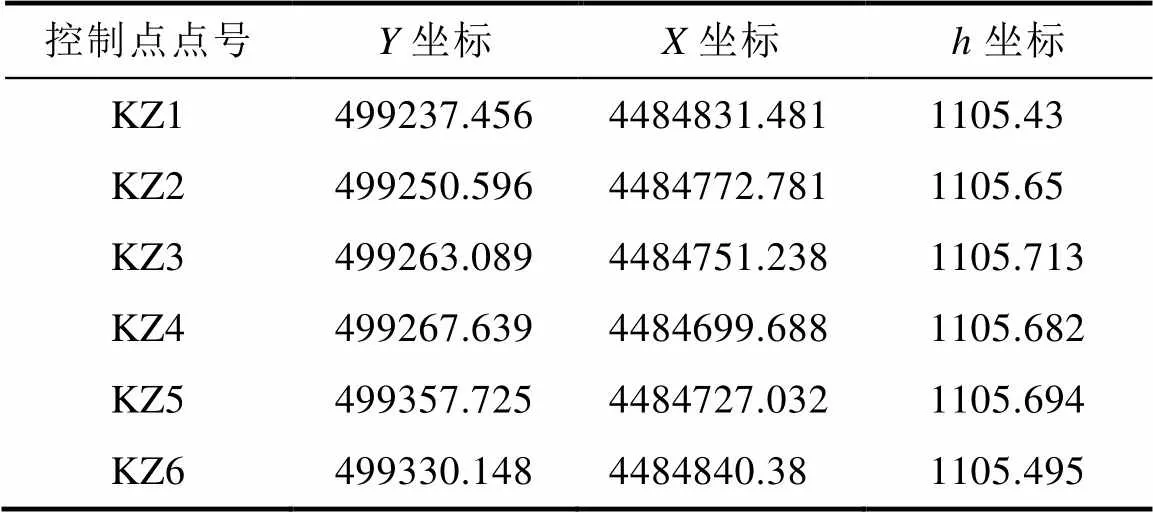
Tab.1 The control point of Target position
实地观察测算三维扫描仪测站数量及位置,选择全站仪视界内能看到的点位作为安置三维激光扫描仪标靶球的位置。选择标靶球安置点位时不能在一条线和相同水平面上,然后进行喷漆标记,本次测站数量设置为8个。
2.1.2 点云数据获取
选择在天气状况良好的情况下进行测量,避免雾天等能见度低的天气影响扫描数据的质量。将标靶球安置于设计好的点位,且距离扫描仪不超过15 m。安置仪器并设置好仪器的配置文件、分辨率、质量及扫描范围等。本次扫描设置的分辨率为44 MPts,质量为1/4,扫描范围是横向360°和纵向300°。完成以上工作后开始进行扫描,注意在扫描过程中,测量人员远离仪器不能遮挡仪器视线,静等待仪器扫描完毕。每次扫描完毕后将标靶球上盖打开,露出标靶球内的反光标靶,将全站仪安置在能通视标靶球的控制点上测量反光标靶,记录标靶的点位信息。建筑物的内景信息主要采用钢尺实地测量和摄影测量相结合的方法进行,如图3所示。全站仪标靶测量数据如表2所示。
表2 三维扫描仪标靶坐标
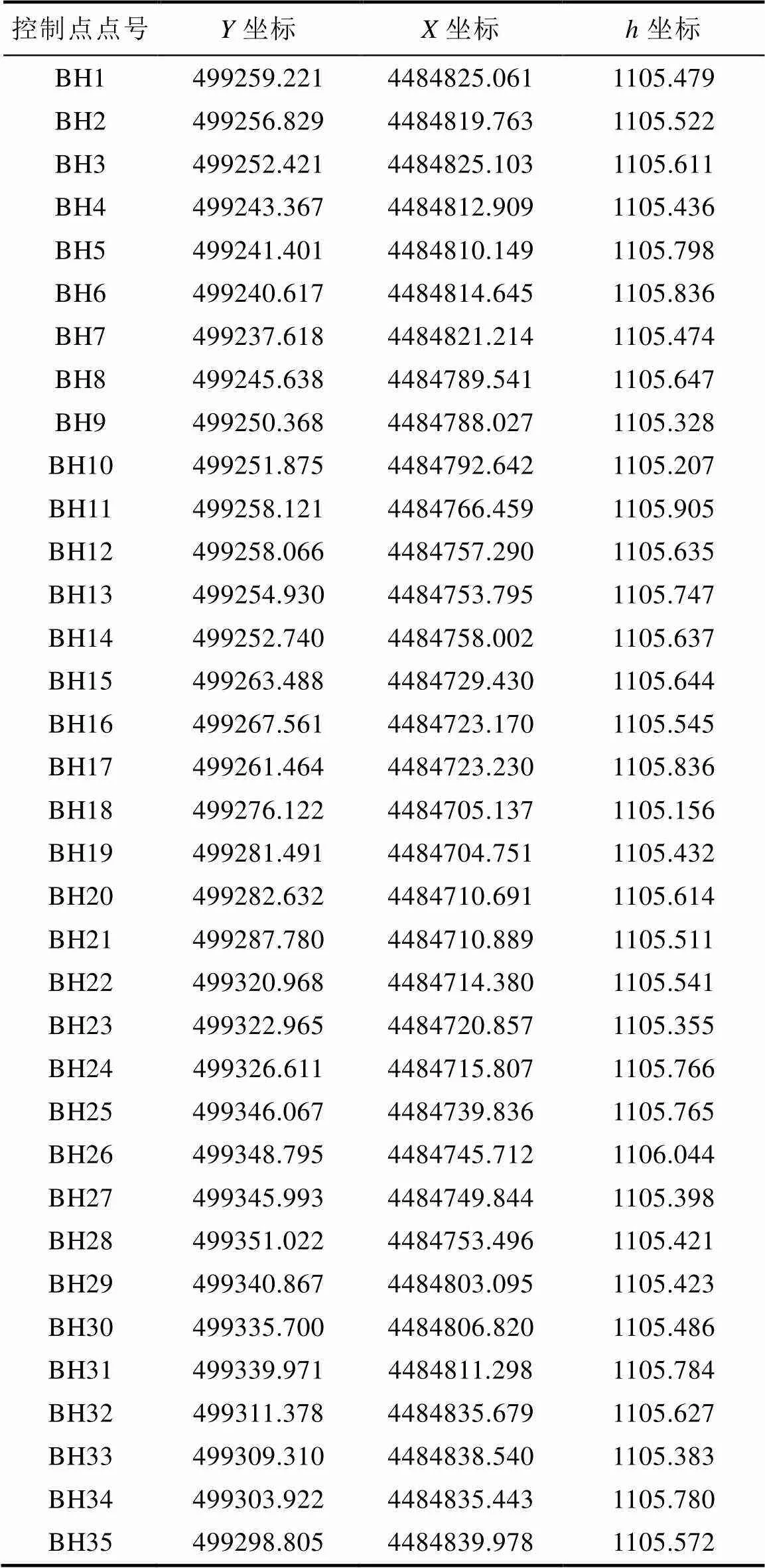
Tab.2 Target coordinates of 3D scanner
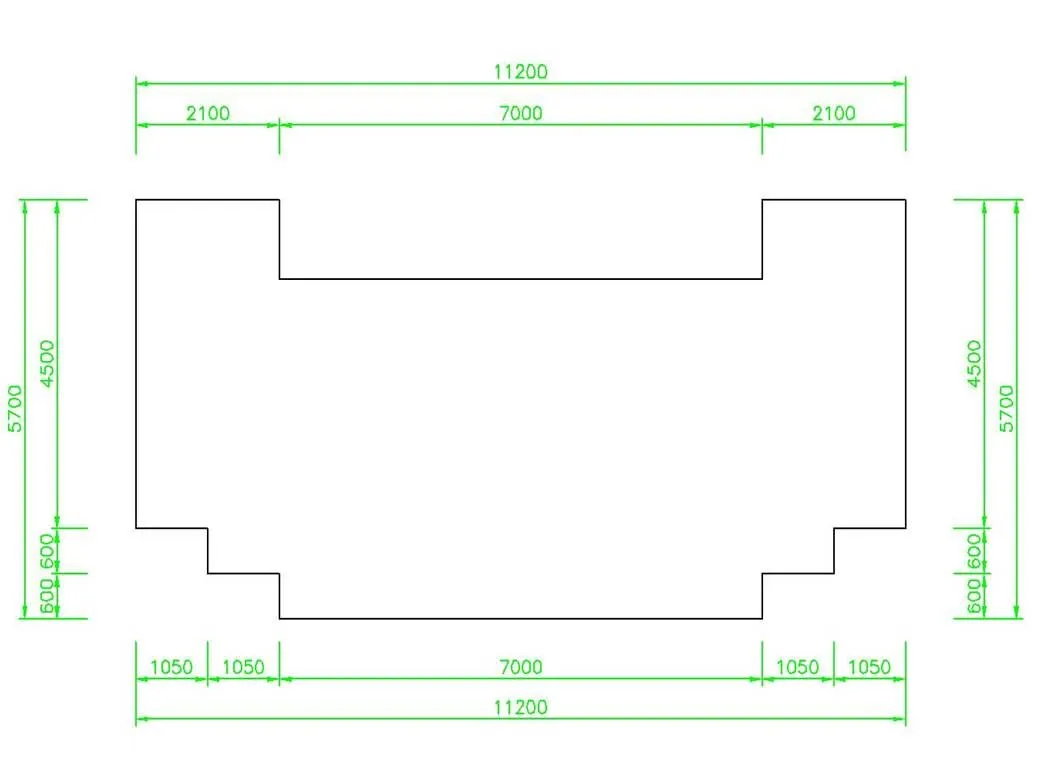
图3 待测目标区域平面底图
2.2 建筑物精细化3D模型构建
2.2.1 靶球坐标赋予
在Scene软件中,新建一个项目文件,将扫描的点云数据导入该项目文件下。利用Scene的选择工具选择标靶球作为球体。这样,一个球体就被创建。在创建对象中,还可以创建其它如平面、中心点等多种几何图形。创建两个球体之后,选择三维清晰视图,将看到两个带颜色的球体。赋予坐标以后的如图4所示。

图4 扫描数据赋予坐标
2.2.2 点云处理及着色
对获取的点云数据进行优化处理,并选取要去除的噪声点,利用软件的删除功能快速删除选中的噪声点云数据。在扫描前,选择色彩信息,可以在侧边项目栏中应用图片,如果没有保存,系统会提示保存现在灰度数据。保存后,系统会将色彩信息自动与点云信息进行匹配,使每一个点都有一个RGB信息,完成后数据导出。RGB色彩变换如图5所示。
2.2.3 多站数据拟合
将多站数据导入与单站数据一样。在扫描时选择用标靶球做为多站的接合目标球,选择勾选“首次加载扫描”、“更新对象拟合”、“应用图片”、“检测自然参考”、“布置扫描”、“创建项目点云”项后,自动处理。处理完成后,选择菜单栏中“3D”,点图标后,会出现全部扫描数据,检查完成后,再将数据导出。点云数据拟合如图6所示。
3 TLS测量精度分析
对三维激光扫描仪点云数据成果进行分析精度是非常有必要的。影响扫描仪数据对齐精度的原因有:扫描时候标靶球的分布,scene拟合球心的精度,标靶球与扫描仪的距离,扫描仪摆放的位置,扫描仪参数设置,天气原因等。
3.1 TLS测距重复性分析
将FARO标靶纸贴于墙面,在同一站扫描六张标靶纸五次,得出三组每组五个共十五个长度数据。
表3 三维激光扫描仪标靶纸测距表

Tab.3 Terrestrial laser scanning target distance meter
由公式1得出7.99 m时测距重复性为0.0052367 m,25.57 m时测距重复性为0.0143128 m,40.86 m时测距重复性为0.0157100 m。
3.2 TLS测距精度分析
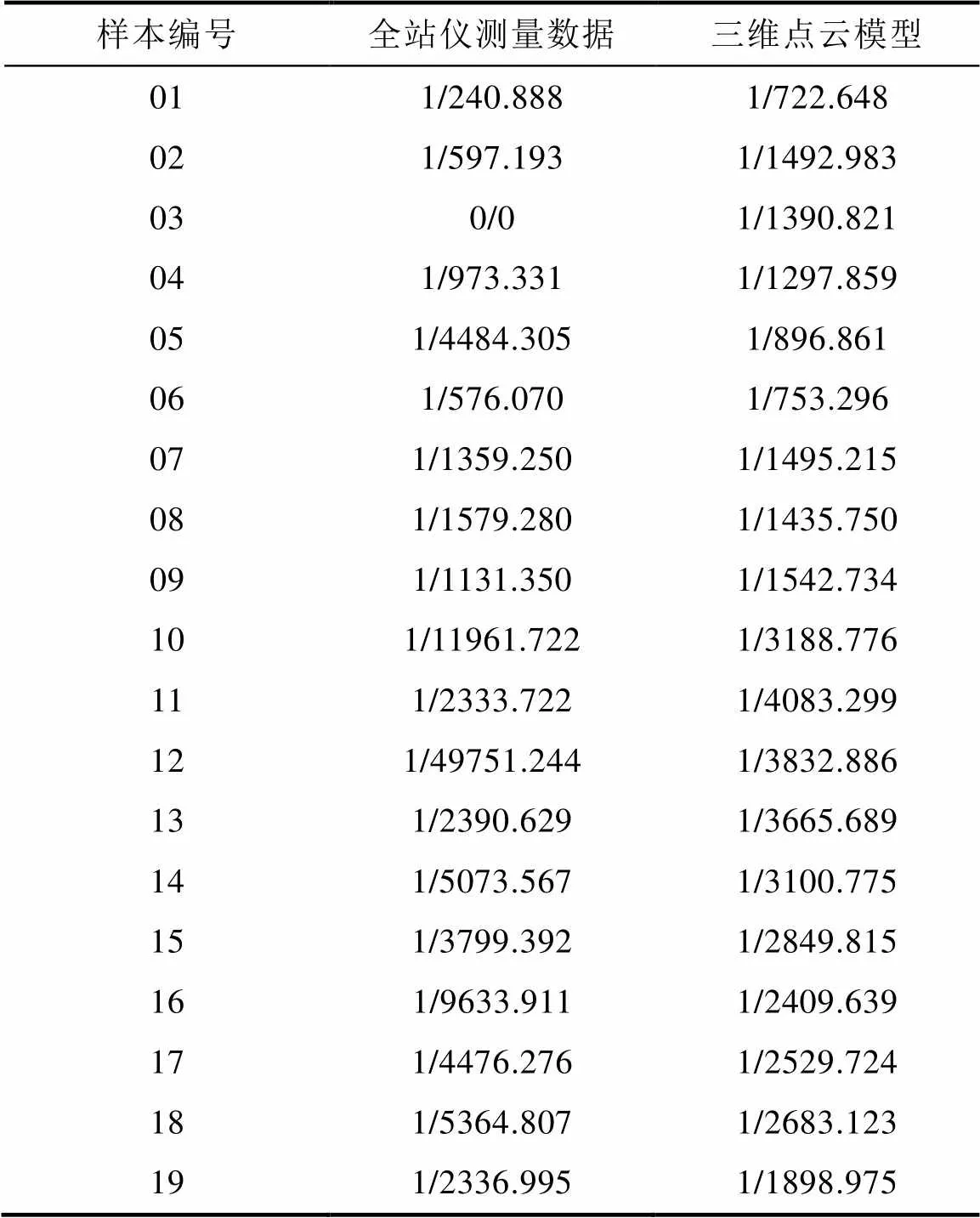
TLS距离测量精度分析主要利用手持测距仪对同一段距离的三次测量平均值作为参考值,并将其分别与全站仪扫描获取的距离和在TLS点云模型上量取的距离进行对比分析,以达到对TLS距离测量精度进行评价的目的。具体操作为:首先用手持测距仪对一段墙体实地测量3次取平均值;然后,全站仪实测建筑物同一段墙体的距离;在Scene内用测量尺测量三维点云模型中同一段距离,并以手持测距仪获取的距离为基准进行对比。最后根据均方根误差公式(式2)计算测距精度。本文随机选取了19段距离作为样本进行评价,样本距离对照如表4所示。
表4 样本距离对比表
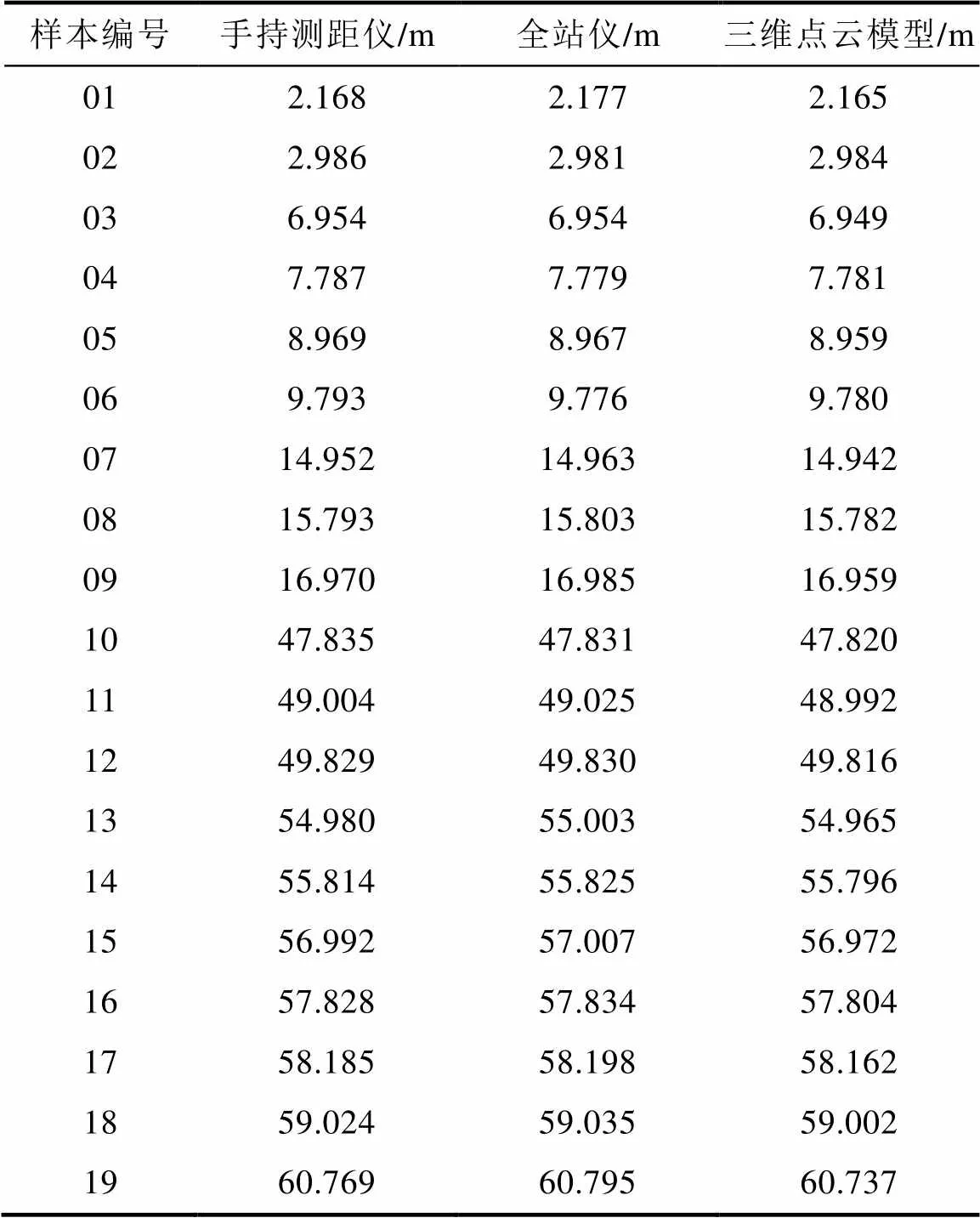
Tab.4 Sample distance comparison table
以上数据以均方根误差
计算后得出:全站仪测量均方根误差为0.01360 m,三维点云模型测量均方根误差为0.01588 m。
以上数据(表4)以相对误差
计算后得出。相对误差精度对比如表5所示。
表5 相对误差对比表
Tab.5 Relative error comparison table
两种数据随着距离增加相对误差分布图如图6所示。
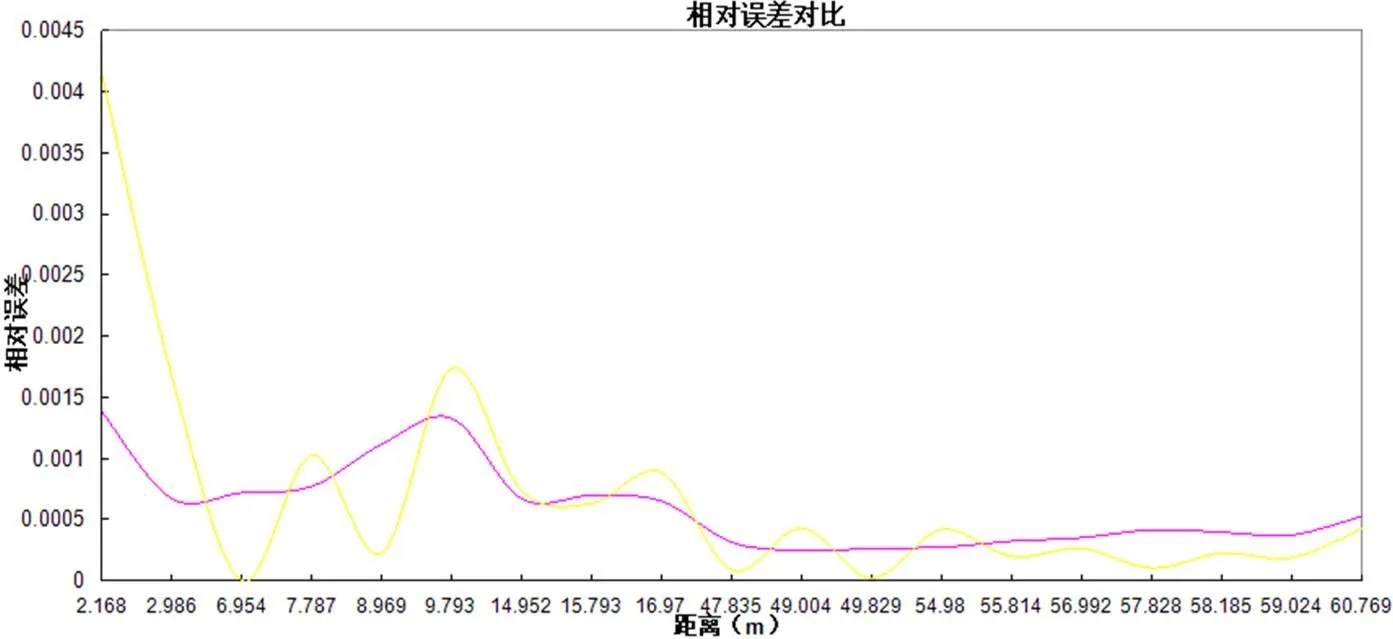
图6 误差对比表(黄线为全站仪,红线为三维点云)
3.3 精度综合评价分析
三维激光扫描仪主要用于三维建模和虚拟现实,以及生成可量测影像。作为获取三维空间信息的高新技术,其点云模型的精度决定了虚拟环境的好坏,因此对其进行测量性能评定至关重要。本文FARO120三维扫描仪厂家给出10 m内90%反射时误差为0.3—0.6 mm,25 m内90%反射时误差为0.5—0.95 mm,但是实际点云模型误差比厂家提供扫描误差要大,而且本次三维扫描仪点云模型精0.01588 m,可能是拟合球心误差所导致。与传统全站仪测量相比较三维激光扫描仪测量点云模型数据在50 m内小于全站仪棱镜测量点位相对误差,且三维点云数据绝对误差和测量距离成正比。所以三维激光扫描仪测距精度和测距重复性都随着距离增长而变大。
4 总结与展望
综上所述,将TLS技术应用于建筑物三维建模和虚拟现实技术时,具有扫描速度快、非接触性、效率高和细节表现较好等特点。且内置高像素彩色相机,能够通过模型表面贴图和点云着色处理等操作最大程度地实现三维模型的虚拟现实。本文通过TLS技术的测距重复性和测距精度两项分析对TLS测量精度进行评价,结果表明TLS技术的距离测量具有较高的精度,能够满足对建筑物精细化3D模型的构建。
三维激光扫描仪不足处有扫描时有局限性,扫描数据时受天气、地物密度和遮挡物的影响,有时候需要多次搬站,而且标靶安置标准高,不好控制,容易造成内业无法拼接。数据处理方面要求硬件配置高,模型后期制作需要大量照片影像,扫描到的点云数据内存过大,无价值的点位过多,不便存储和普通用户使用。测量外业中需要其它仪器辅助。不适用于精度高大面积测绘,不适于高层建筑和地物密集场所的扫描。
[1] 郑德华, 雷伟刚. 地面三维激光影像扫描测量技术[J]. 铁路航测, 2003(2): 26-28.
[2] 张会霞, 陈宜金, 刘国波.基于三维激光扫描仪的校园建筑物建模研究[J]. 测绘工程, 2010, 19(1): 32-34.
[3] 张毕祥.基于倾斜摄影测量技术在大比例尺地形图测绘中的研究[J]. 软件, 2018, 39(7): 146-151
[4] 李必军, 方志祥, 任娟.从激光扫描数据中进行建筑物特征提取研究[J]. 武汉大学学报: 信息科学版, 2003, 28(1): 65-70.
[5] 周克勤, 赵煦, 丁延辉.基于激光点云的3维可视化方法[J]. 测绘科学技术学报, 2006, 23(1): 69-72.
[6] 郑德华, 岳东杰, 岳建平.基于几何特征约束的建筑物点云配准算法[J]. 测绘学报, 2008, 37(4): 464-468.
[7] 梅文胜, 周燕芳, 周俊.基于地面三维激光扫描的精细地形测绘[J]. 测绘通报, 2010(1) : 53-56.
[8] 刘求龙, 胡伍生, 王骢, 等. 三维激光扫描仪在惠泉变电站三维模型构建中的研究与实现[J]. 测绘通报, 2010(9): 35-37.
[9] 王守国.地面激光扫描仪鉴别率检定方法的研究[J]. 测绘通报, 2011(6): 45-47.
[10] 罗德安, 朱光, 陆立, 等. 基3维激光影像扫描技术的整体变形监测[J]. 测绘通报, 2005(7): 40-42.
[11] 惠增宏.激光三维扫描重建技术及其在工程中的应用[D]. 西安: 西北工业大学, 2002.
[12] 吴静, 靳奉祥, 王健. 基于三维激光扫描数据的建筑物三维建模[J]. 测绘工程, 2007(5): 57-59.
[13] 黄承亮, 向娟.三维激光扫描技术应用于建筑物建模的测量方法研究[J]. 城市勘测, 2011(1): 87-90.
[14] 彭维吉, 李孝雁, 黄飒. 基于地面三维激光扫描技术的快速地形图测绘[J]. 测绘通报, 2013(3): 70-72.
[15] 李长春, 薛华柱, 徐克科. 三维激光扫描在建筑物模型构建中的研究与实现[J]. 河南理工大学学报(自然科学版), 2008, 27(2): 193-199.
Research on Building Model Based on Terrestrial Laser Scanning Technology
GENG Li-na1,2, ZHU Lan-yan1*, LI Qi-meng2, ZHANG Bi-xiang1
(1. Faculty of Land Resources Engineering, Kunming University of Science and Technology, Kunming 650093; 2. Yunnan Port and Channel Investment Construction Co., Ltd,Kunming 650051)
Terrestrial Laser Scanning technology is a fully automatic and high-precision stereo scanning technology, and it is a new surveying and mapping technology after GPS space positioning. First of all, this paper describes the ranging and working principle of Terrestrial Laser Scanning.Then scanning and modeling of a building with TLS Technology.Among them, the key points of building fine 3D building models based on point cloud data are explored. In addition, this paper also explore and summarize the whole process of TLS technology field scanning and internal data processing. Finally, the advantages of TLS technology compared with traditional measurement technology are discussed, and the application prospect of TLS technology is also prospected.
TLS Technology; Point cloud processing; Building; 3D modeling
P208
A
10.3969/j.issn.1003-6970.2018.11.030
耿黎娜(1989-),女,硕士研究生,主要从遥感监测、GIS、三维激光扫描等方面的研究工作。
朱兰艳(1966-),女,硕导,副教授,主要从事测量数据处理及误差分析、GPS和GIS的质量评估等方面的研究工作。
耿黎娜,朱兰艳,李启萌,等. 基于三维激光扫描技术的建筑物模型构建的研究[J]. 软件,2018,39(11):134-139