基于极限学习机的风电机组变桨距系统辨识方法研究
2018-12-19吕俊杰王欣
吕俊杰,王欣
(湖南工业大学电气与信息工程学院,湖南 株洲 412007)
0 引言
风力发电系统是个多变量、强耦合的非线性系统,对系统进行控制时,通常需要了解系统的线性化模型。但当系统运行工况发生变化时,传统的线性化模型系统的控制效果会降低,不能满足实际运行的需要。因此,建立精确的风力发电非线性模型,对风电机组的控制及优化具有重要意义[1]。
风力发电系统常用的建模方法主要有:机理建模和神经网络辨识两种方法[2-4]。但风电发电系统模型十分复杂,且具有很强的非线性,很难通过机理建模的方法建立精确的模型,无法保证模型精度,导致模型误差较大,从而控制效果不够理想。近年来,国内外许多研究学者对风力发电系统的非线性模型辨识进行了深入研究。文献[5]采用多模型LPV方法对风力发电机进行辨识,在不同工作点辨识多个局部线性模型,但在切换工作点是会出现较大的偏差,不能精确地进行全局辨识。文献[6]采用支持向量回归(SVR)算法对变桨距风力机模型进行在线自适应辨识,采用增量学习算法,保证了在线辨识过程中的鲁棒性,最终辨识结果具有很强的精度和拟合能力。文献[7]采用动态模糊神经网络(D-FNN)对变桨距系统进行辨识,可以根据样本的改变调整模糊神经网络的结构,但算法难度大大增加。文献[8]采用RBF神经网络对风电机组的转矩环和桨距环分别进行辨识,但RBF神经网络结构简单,泛化能力不理想,无法很好的辨识风电机组模型。
本文将采用ELM神经网络对风电机组变桨距系统进行辨识,ELM模型的输入为桨距角和风速,输出为发电机的功率。仿真结果表明,该方法对变桨距非线性动态系统辨识中具有比较高的辨识精度。
1 变桨距系统分析
变桨距风力机一般分为四个子系统:空气动力系统、传动系统、变桨距执行系统和发电机系统。当风速高于额定风速时,发电机的输出功率也随之增大,通过调节桨叶桨距角来减少发电机的输出功率并使之稳定在额定功率左右。
在湍流风力的作用下,风轮不可能捕获通过风轮扫面内的全部风能,存在风能利用系数CP:

式中,Pout为风轮吸收的机械能;Pin为风轮扫面内的全部风能;ρ为空气密度;A为风轮扫面面积;v为风轮有效风速。
CP表示风轮从风能中吸收功率的能力,是叶尖速比λ和桨距角β的非线性函数,由文献[9]可知,风能利用系数CP可近似用以下非线性函数表示:

其中,叶尖速比λ为桨叶尖部的线速度与风速之比:

R为风轮半径,ω风力机转速。
式(2)是对桨叶进行理想化分析近似得出,实际上风轮桨叶上的空气动力学分析十分复杂,且非线性程度更为严重。因此,对于变桨距控制来说,主要研究的系统辨识模型输入为桨距角和风速,输出为发电机输出功率。
不同覆膜时期向日葵长势和产量测定结果表明,非生育期覆膜成熟期长势和产量明显好于常规播前覆膜。上年秋季覆膜株高、茎粗、花盘直径、产量分别较常规播前覆膜提高21.3%,26.3%,35.8%,58.1%;早春覆膜分别比常规播前覆膜株高、茎粗、花盘直径、产量提高11.3%,10.5%,33.3%,38.2%(表3,表4)。
2 极限学习机算法
极限学习机(extreme learning machine, ELM)是由Huang等人在2004年提出的,是一种新型单隐层前馈神经网络的学习方法。在ELM中,输入层与隐含层之间的连接权值和隐层节点的阈值能够随机产生,通过最小二乘法得到网络的输出层权值,整个运行过程不需要调整参数,只需设定隐含层神经元个数。与传统神经网络相比,ELM 既能保证网络有较好的建模准确程度,又具有学习速度快、泛化能力好、精度高等优点[10]。

图1 极限学习机网络结构Fig.1 ELM network structure

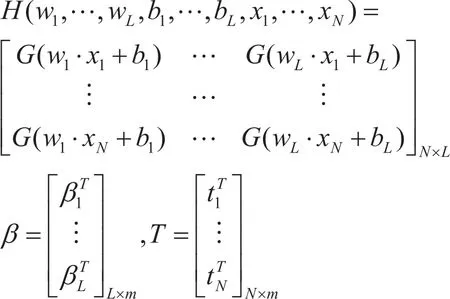
式中:L为隐含层节点数,G(x)为给定的激活函数,可以选择为“Sigmoid”,“Sine”或者“RBF”等。为第i个隐层节点与输出节点的权重向量,bi是第i个隐层节点的偏置;为第i个隐层节点的输出权重向量,N为样本数。
上式同样可用矩阵表示为:

式中:H为ELM隐含层的输出矩阵;β为输出权重矩阵;T为期望输出矩阵。
对于模型从隐层至输出层阶段可视为线性关系,输出权重β可由最小二乘法解得:

式中,H+表示隐含层的输出矩阵H的Moore-Penose广义逆。由此可得,极限学习机算法的实现步骤为[11]:
(2)随机生成隐层神经元参数(wi,bi);
(3)计算隐层输出矩阵H;
(4)计算输出权重β。
ELM在训练过程中只需调整隐含层节点数和确定激活函数,无需调整输入权值和偏置,就可获得一个全局的最优解,极大地提高了网络的学习速度和泛化能力。与传统的神经网络相比,极限学习机训练速度快,具有全局寻优和良好的泛化能力,避免了传统神经网络需要人工进行参数设定、训练容易陷入局部最小及过拟合的问题。
ELM神经网络算法的流程图如图2所示:

图2 ELM建模流程图Fig.2 ELM modeling flow chart
3 基于ELM的变桨距系统模型辨识
本研究采用Matlab/Simulink仿真分析工具建立2 MW风力发电系统变桨距控制仿真模型,机组主要参数如表1所示。对其进行变桨距控制仿真产生的数据作为变桨距系统辨识的依据。变桨距风力机辨识系统模型的输入为桨距角和风速,输出为发电机的功率,即训练样本集为{β,v,Pg}。设定基本风速为15 m/s,湍流强度为12%,选取1000组采样数据,采样频率为20 Hz,其中800组数据作为训练集,剩下200组数据作为测试集。
不同单位和量纲会对神经网络学习造成影响,会导致在训练过程中,数据较大的特征对结果的影响更大,为了消除这种影响,保证更快的学习速率及网络神经元的非线性作用,应采用归一化的方法对ELM神经网络的样本数据进行处理。按照归一化公式(7)将样本数据归一化到[0,1]区间[12,13]。

在ELM算法中,ELM神经网络结构为3层,输入层包括2个变量:桨距角和风速,输出层为1个变量,即发电机输出功率。激活函数采用Sigmoid函数,输入权重Wi和隐层节点偏置bi随机初始化,不需要迭代调整,仅需设置隐层节点个数。隐层节点数在一定范围内选取,ELM模型能保持稳定的泛化性能,考虑到隐含层节点的选择对模型的性能有直接的影响,隐层节点过多会增加模型结构复杂性,过少会达不到模型的最佳精度。使用训练集和测试集的测试验证的方法以寻求测试误差最小来确定最优的节点数。
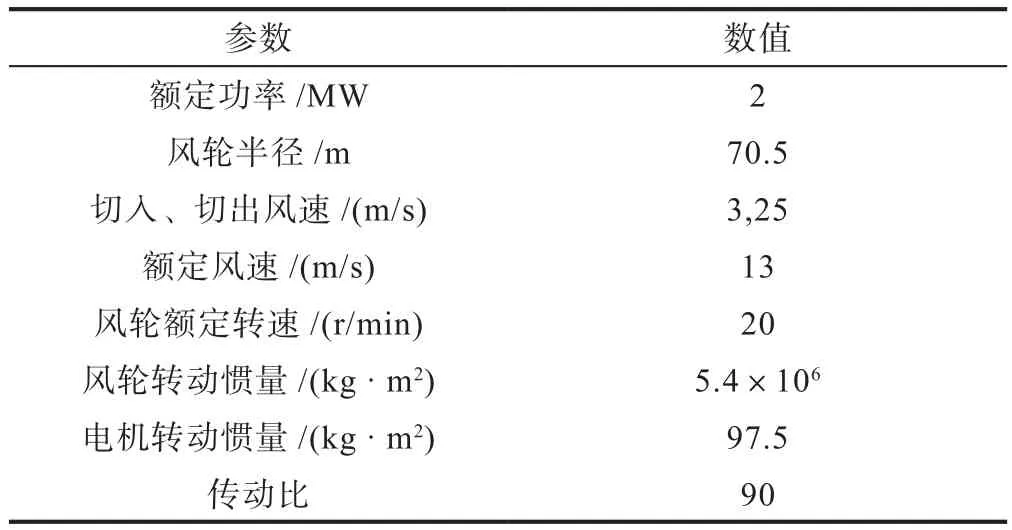
表1 2MW风力发电机组主要参数Table 1 Main parameters of 2MW Wind Turbine
图3为ELM隐含层节点数对预测模型均方根误差的影响,采用均方根误差(RMSE)对预测效果进行评价,可以看出测试误差和训练误差随着隐层节点数的增加而减少。根据均方根误差选取最佳隐层节点数,通过分析和对比验证,可以看出当节点数达到30左右,ELM模型有较好的辨识精度,因此选取极限学习机模型的隐含层节点数为30。

图3 隐层节点数影响Fig.3 Effect of nodes in hidden layer

图4 ELM模型的输入输出数据Fig.4 Input and output data of ELM model
2 MW变桨距风力机输入输出训练数据如图4所示,(a)~(c)分别是风速、桨距角和发电机功率曲线,作为ELM模型的输入输出。

图5 ELM模型辨识的发电机功率Fig.5 Generator power based on ELM

图6 预测误差Fig.6 Predicitive error model identification
图5和图6是用测试集的200组数据运用ELM模型对变桨距系统进行辨识后与实际数据进行对比。可以看出ELM预测模型能够准确、合理地辨识变桨距系统,具有较高的辨识精度,说明ELM神经网络具有很好的辨识效果。
4 结论
本研究通过采用ELM神经网络对风电机组变桨距系统进行辨识研究,极限学习机克服了传统神经网络存在的局部最优、训练速度慢、学习率选择敏感等问题。仿真结果表明,ELM神经网络可以很好地拟合变桨距系统,且具有较高的辨识精度。后面研究中应考虑对ELM算法进行改进,实现对变桨距系统进行在线辨识。