一种船舶轴频电场传播特性分析方法*
2018-12-19冯士民张伽伟
冯士民 , 张伽伟 , 王 娇
(1.海军工程大学 兵器工程学院,湖北 武汉 430033;2.解放军92941部队,辽宁 葫芦岛 125001;3.解放军91208部队,山东 青岛 266102)
0 引 言
国内外大量研究表明[1-5],船舶电场是一种可以用来对目标进行探测和识别的信号源,是船舶除声场和磁场以外的另一类重要物理场。船舶电场主要包含静电场和交变电场。不同类型的电场之间产生机理和特性均存在差异,因而可以得到不同的应用。其中,静电场是舰船电场中强度最大且在海水中衰减最小的成分,可被用作水中兵器的目标信号源或被动制导系统的目标信号源。但是,当目标远离传感器时,静电场信号在时域和频域中均无明显的目标特征,且海洋环境电场也主要集中在该频段内,因而在远程探测中的应用难度较大。舰船交变电场中含有目标特征信息的频段主要是轴频和工频,其中工频电场虽然强度较大,但是由于频率较高,水下传播衰减较快。相比之下,主要由螺旋桨旋转调制腐蚀或防腐电流而产生的轴频电场信号,不仅具有明显的线谱特征和谐波成分,而且不易受海洋环境影响,可以作为理想的远程探测信号源。国外从20世纪50年代初开始了相关研究[6-12],国内近些年也特别重视轴频电场的研究,在相应的数学模型和消除轴频电场装置的研究上取得了一定的成果。
1 船舶轴频电场产生机理
船舶使用防腐措施后,牺牲阳极(或辅助阳极)发出的电流经海水回流到船体,其中有相当一部分是通过舰船的螺旋桨、主轴再返回船体的,如图1所示。
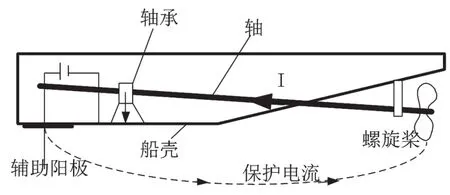
图1 船舶水线下电流
由图1可知,螺旋桨—轴—轴承—船体(或辅助阳极)组成了电流回路,简化如图2所示。

图2 轴频电场产生的等效电路
图2 中,φ0a、φ0k分别为阳极、阴极电位,Rw为海水电阻,Rb分别轴和轴承之间的等效电阻(轴-地)。
回路电流为:

当螺旋桨转动时,轴和轴承之间的电阻也就是Rb会随着螺旋桨轴的旋转而发生周期变化,从而对海水中流经主轴的电流I产生周期性调制。经过调制的轴电流产生的电场即为船舶的轴频电场,该电场是以螺旋桨转动频率为基频的时变信号。
2 舰船轴频电场产生及测量系统
2.1 轴频电场产生
为了验证船舶轴频电场的产生,需要高精度的数字万用表对船模的轴地电阻进行测量,实验船模如图3所示。

图3 船模的轴系结构
船模内部轴上有多对碳刷和滑环,其中一对碳刷与船壳相连。测量其他未接船壳的碳刷与该碳刷之间的电阻变化情况,便可模拟轴和船壳之间的电阻波动情况。
2.2 轴频电场测量系统
为了分析轴频电场传播特性,在水池中利用船模拖动装置匀速拖动模型测量电场传感器,通过轴频电场测量系统实时记录电场传感器阵列输出的电场信号,如图4所示。
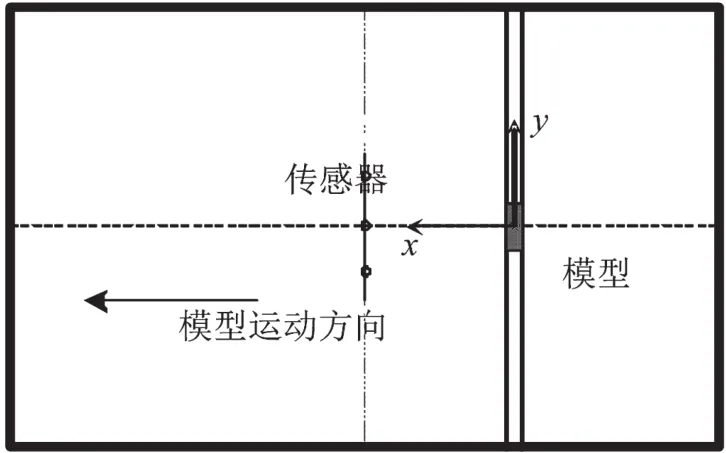
图4 测量过程
轴频电场测量系统的组成如图5所示。该测量电路主要由电源模块、传感器模块、信号调理模块、数据采集模块和存储模块组成,使用单片机作为整个测量系统的主控单元。
2.2.1 传感器模块
如上文所述,传感器模块是水下电场测量系统的关键。为了同时测量三个正交方向的电场信号,测量系统共使用4个Ag/AgCl电极,布放情况如图6所示。测量电极对(2-3)、(4-3)和(1-3),按右手螺旋法固定于测量体支架,分别测量x、y和z方向的电场信号。
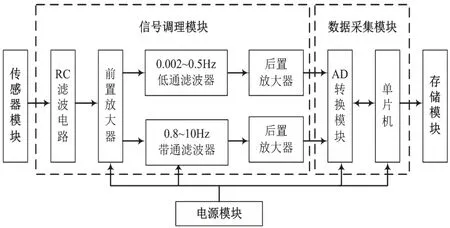
图5 低噪声测量电路组成

图6 测量电极布放情况
2.2.2 电源模块
电源模块由锂电池组供电,通过电源转换芯片分别调整输出+15 V、-15 V、+5 V和3.3 V,提供给测量电路的各个模块。其中,+15 V和-15 V为信号调理模块供电,+5 V为A/D转换电路供电,+3.3 V为单片机及存储模块供电。
2.2.3 信号调理模块
信号调理模块包括RC滤波电路、前置放大电路、有源滤波电路、二次放大电路和电平转换电路等。为了防止测量电极对之间静差较大时引起的电路饱和,在前置放大器输入前,增加了高通滤波器,其高通截止频率为0.002 Hz。
2.2.4 数据采集模块
数据采集模块主要实现调理信号的A/D转换、控制系统采样、存储数据和时间信息等功能。为了保证三路信号的同步性且降低系统功耗(并行A/D转换芯片功耗普遍较大),采用3片24位低噪声A/D转换芯片AD7799(工作电流为380 μA,增益为1、转换频率为33.3 Hz时,其噪声有效值为2.3 μV),分别同时完成三路低通信号、三路带通信号和一路水压场信号的A/D转换。
经过进一步的测试分析,该测量系统的主要性能指标如下:
(1)供电电压:18~36 V;
(2)工作电流:≤100 mA;
(3)工作带宽:0.002~0.5 Hz,0.8~10 Hz;
(4)自噪声:峰-峰值不大于0.3 μV;
(5)放大倍数:0.5 Hz以下信号放大200倍,0.8~10 Hz放大2 000倍;
(6)采样频率:0.5 Hz以下的电场信号2 Hz采样;0.8~10 Hz电场信号40 Hz采样。
3 轴频电场传播特性分析
图7和图8分别给出了图3中船模螺旋桨在35 r/min和50 r/min时的轴—地电阻波动情况。从图7(b)和图8(b)中可以看出,35 r/min时基频约为0.6 Hz,50 r/min时基频约为0.8 Hz。由此可知,轴—地电阻波动变化与螺旋桨转动频率一致,不仅存在基频信号,而且伴有高次谐波,从而验证了船舶轴频电场的产生机理。
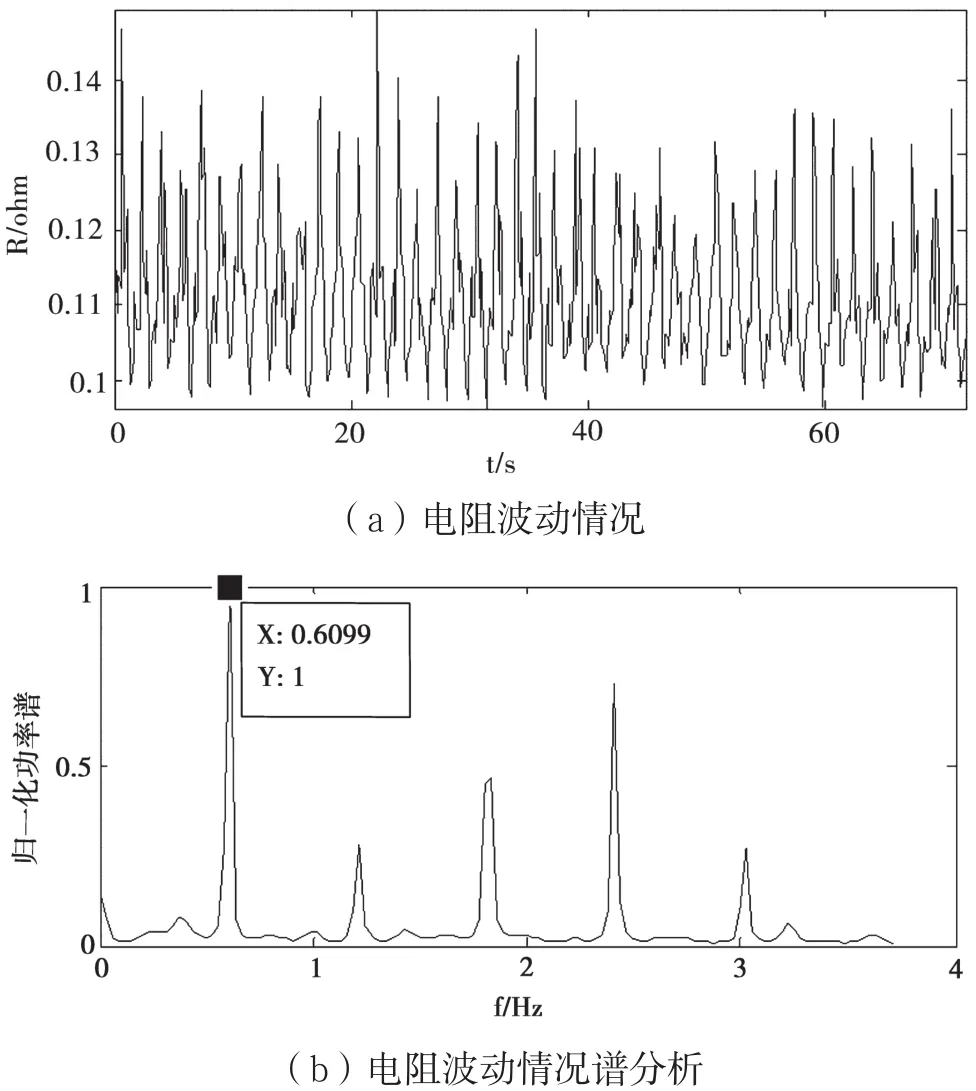
图7 转速为35 r/min时的电阻波动情况
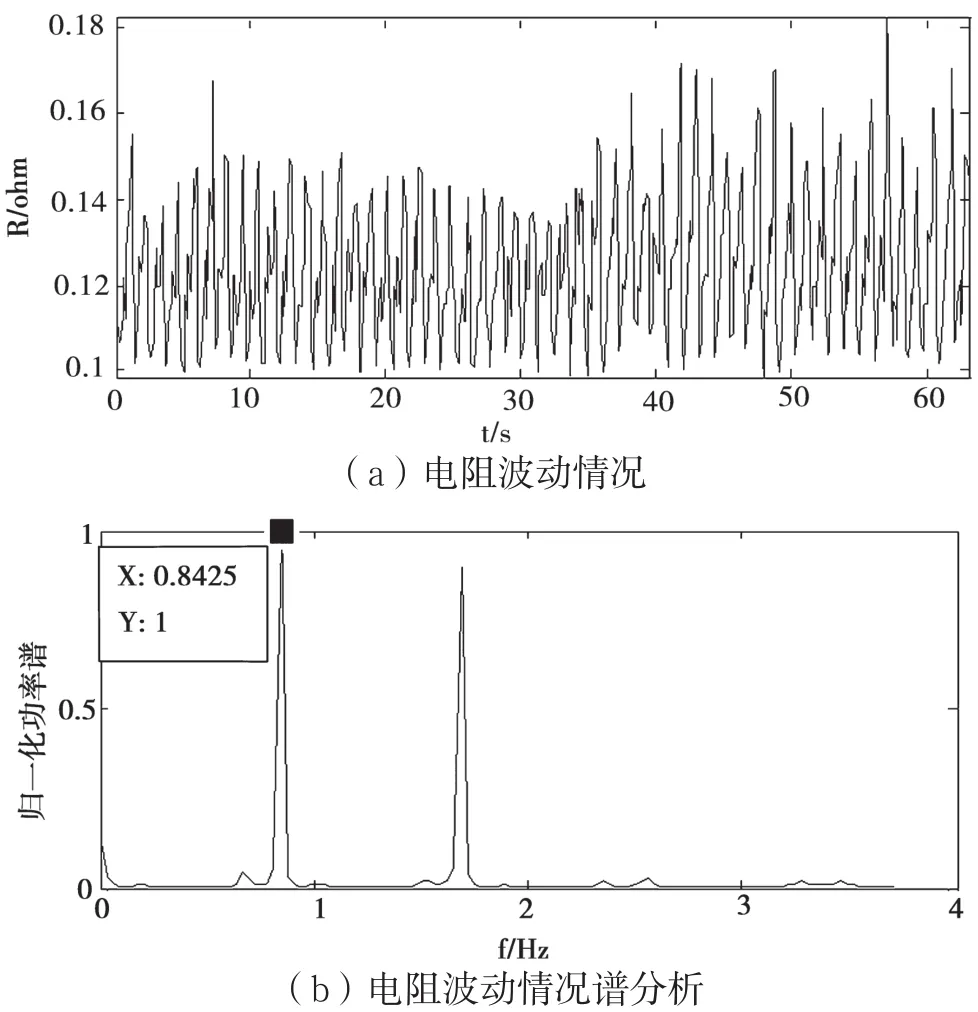
图8 转速为50 r/min时的电阻波动情况
图9 给出了图3中模型在水下40 cm不同正横距离(40 cm和60 cm)时,利用图5所示的测量系统测得的船模轴频电场三轴通过特性。
由测量可知,船模在航行时,在时域上存在明显的轴频信号特征,轴频电场x轴分量在船模螺旋桨下方具有最大值,而y和z为最小值,且在螺旋桨前后各有一个峰值。可明显发现,垂直方向z的电场信号幅值相比于水平x和y分量要小得多,这是由于理论上垂直方向电场分量数值本身比x和y分量要小。


图9 轴频电场传播特性测量结果
4 结 语
本文设计的轴频电场测量系统和测量方法,对船模轴频电场的产生机理进行了原理验证,通过测量船模产生的轴频电场,分析轴频电场的传播特性。该轴频电场测量系统不仅可用于实验研究,还可以应用到海上对实际船舶产生的电场进行有效测量和分析。
