通用六轴工业机器人创建与离线编程
2018-12-17朱国云
朱国云
(深圳第二高级技工学校 广东深圳 518000)
引言
随着机器人应用领域越来越广,传统的示教编程这种编程手段有些场合变得效率非常低下,最大的缺点是需要占用机器人工作时间,因此离线编程应运而生,并且应用越来越普及。离线编程是通过软件,在电脑里重建整个工作场景的三维虚拟环境,然后软件可以根据要工加零件的大小、形状、材料,同时配合软件操作者的一些操作,自动生成机器人的运动轨迹,即控制指令,然后在软件中仿真与调整轨迹,最后生成机器人程序传输给机器人。离线编程的使用减少机器人停机的时间,使编程者远离危险的工作环境,改善了编程环境; 第三方通用离线编程软件可以对各种机器人进行编程,如RobotArt、RobotMaster、RobotWorks、EASY-ROB都可以支持多种品牌工业机器人离线编程操作,EASY-ROB软件还提供了用户创建1-12轴机器人平台,本文是基于该平台从运动学正解和逆解两方面详细示范介绍了六轴通用工业机器人的搭建方法,并可利用自己拱建的机器人去创建应用工作单元。
一、机器人模型概述
1.机器人运动学模型
根据实际需要设定机器人的自由度,提前规划好机器人六个轴的关节运动范围、关节运动旋转方向、关节运动速度、加速度数等参数;规划好机器人基座中心点到第一轴的位置偏移,第一轴到第二轴的位置偏移,依此类推直到第六轴到TCP的位置偏移。
2.机器人CAD模型
利用3维建模工具依据机器人运动学模型绘制创建机器人底座及各轴连杆的三维CAD模型,为后续粘连到机器人各轴做好准备。
二、机器人CAD模型
1.设置机器人关节数及旋转方式
EASY-ROB提供了多种机器人创建模型,通常我们会选择创建通用型机器人,可以选择1-12轴机器人创建,根据需要设定机器人的轴数(6轴)和各关节的旋转方向。
2.设置机器人各轴中心点的坐标位置
(1)机器人第1轴中心点相对底座中心点的位置偏移:X=0,Y=0,Z=174,RX=0,RY=0,RZ=0;
(2)机器人第2轴中心点相对第1轴中心点的位置偏移:X=160,Y=0,Z=256,RX=0,RY=0,RZ=0;
(3)机器人第3轴中心点相对第2轴中心点的位置偏移:X=0,Y=0,Z=580,RX=0,RY=0,RZ=0;
(4)机器人第4轴中心点相对第3轴中心点的位置偏移:X=140,Y=0,Z=125,RX=0,RY=0,RZ=0;
(5)机器人第5轴中心点相对第4轴中心点的位置偏移:X=510,Y=0,Z=0,RX=0,RY=0,RZ=0;
(6)机器人第6轴中心点相对第5轴中心点的位置偏移:X=0,Y=0,Z=0,RX=0,RY=0,RZ=0;
(7)机器人第法兰盘中心点相对第6轴中心点的位置偏移:X=100,Y=0,Z=0,RX=0,RY=90,RZ=0;
3.创建机器人BODY,并粘连到对应轴
机器人运动学模型建立好后,接下就要创建机器人CAD模型了,EASY-ROB软件提供了简单的几何体创建方法,如立体体(CUBE)、金字塔(PYRAMID)、楔形物(WEDGE)等;同时支持STL文件、IGP文件、3DS文件导入,文件导入时注意调整缩放比例;最后把创建或导入的BODY文件粘连到对应的轴上,机器人就有血和肉了。
4.设置机器人属性
通过机器人运动学对话框,可以设置以下参数,如机器人名称,机器人工具,机器人原点位置,原点位置最多支持设置12个,各关节轴的运动范围等,所有的这些设置也最终决定了机器人的运动半径和运动范围,和实体机器人是完全对应的。
5.运动学逆变换
前面我们所做的都是运动学正变换,也叫运动学正解,即给定机器人各关节变量,计算机器人末端的位置姿态;若要通过机器人末端的位置姿态来计算机器人对应位置的全部关节变量,就需要对机器人进行逆变换,也是通常讲的运动学逆解,只有经过运动学逆变换后才能对机器人进行编程,TCP自动生成在第六轴的法兰盘中心点。
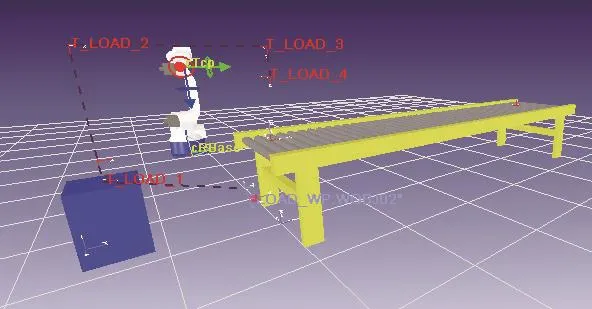
三、机器人简单工作站的离线编程
机器人搭建好后,我们就可能通过正常加载方法来进行加载,创建工作单元,编程和调试。
1.加载机器人文件
机器人文件可以从库里调用,也可以根据需要自行创建,创建方法和步骤见上文所述。
2.加载工具文件
工具文件定义了TCP的位置和旋转角度等信息,加载后会自动将TCP的位置移动到工具的未端中心点位置,如果需要修改可以在工作单元中重新设置TCP的位姿。
3.加载设备文件
EASY-ROB软件定义1-3轴的机器人文件为设备(DEVICE),4轴及以上的机器人文件才是机器人,单机器人版和多机器人版也是以此来定义的。
4.加载或创建BODY文件
5.根据工作需要调整工作单元中各设备的位置
6.目标点示教和编程
EASY-ROB软件提供了强大的后置处理功能,可以方便的将EASY-ROB本身的编程语言后置处理为其他机器人品牌的编程语言,可以大大减轻学习压力。
结束语
机器人离线编程正朝着一个智能化、专用化的方向发展,用户操作越来越简单方便,并且能够快速生成控制程序。在某些具体的应用领域可以实现参数化,极大的简化了用户的操作。同时机器人离线编程技术对机器人的推广应用及其工作效率的提升有着重要的意义,离线编程可以大幅度节约制造时间,实现机器人的实时仿真,为机器人的编程和调试提供灵活的工作环境,离线编程是机器人发展的一个大的方向。