纯电动汽车驱动控制策略仿真分析
2018-12-08方成王萌王宇欧文军
方成 王萌 王宇 欧文军
(上汽通用汽车有限公司武汉分公司)

目前,针对纯电动汽车驱动控制策略的研究主要集中在汽车的动力性方面,没有反映出驾驶员在控制加速踏板的过程中所代表的动态意图[1]。目前的纯电动汽车驱动控制策略可分为硬踏板加速、软踏板加速及线性踏板加速3种,为了解决纯电动汽车动力性和操控性难以同时兼顾的问题,文章将驾驶员意图分为稳态意图和动态意图。稳态意图用于保证汽车的操控性,动态意图用于保证汽车的动力性[2]。在此基础上提出了一种基于驾驶员意图识别的纯电动汽车动力性驱动控制策略,并采用MATLAB/Simulink进行了仿真,仿真结果表明,该策略在保证纯电动汽车操控性的同时,能够根据驾驶员动态意图提高汽车的动力性。
1 纯电动汽车整车控制策略
纯电动汽车驱动控制策略,如图1所示。图1中曲线1,2,3分别代表1种驱动控制策略。曲线1为硬踏板加速曲线,能较好地满足汽车的动力性要求;曲线3为软踏板加速曲线,能较好地满足汽车的操控性要求;但曲线1和3的函数形式比较复杂,需要考虑的参数太多,计算量大;曲线2为线性踏板加速策略,控制效果介于曲线1和3之间,函数形式简单,控制简便易行。但曲线2只考虑了转矩与加速踏板开度之间的关系,而实际上还应考虑电机的控制策略与工作特性。
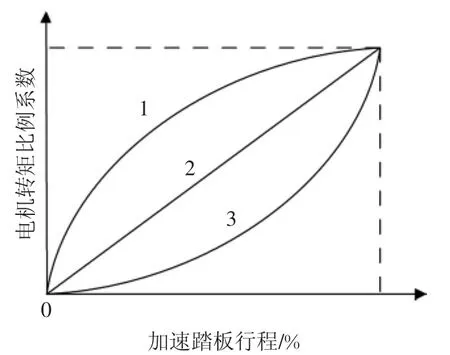
图1 纯电动汽车3种驱动控制策略曲线图
为了兼顾纯电动汽车高负荷时的动力性和低负荷时的操纵性,将驾驶员的驾驶意图分为稳态意图和动态意图。加速踏板行程代表了驾驶员稳态意图,由加速踏板为某一固定值时的电机输出转矩表征;加速踏板行程变化率代表了驾驶员动态意图,由踩踏加速踏板过程中的电机转矩变化率表征。在此基础上,提出了一种基于驾驶员意图识别的纯电动汽车驱动控制策略,如图2所示,该策略分为稳态意图识别、动态意图识别、动态补偿转矩计算和输出转矩计算4个部分[3]。
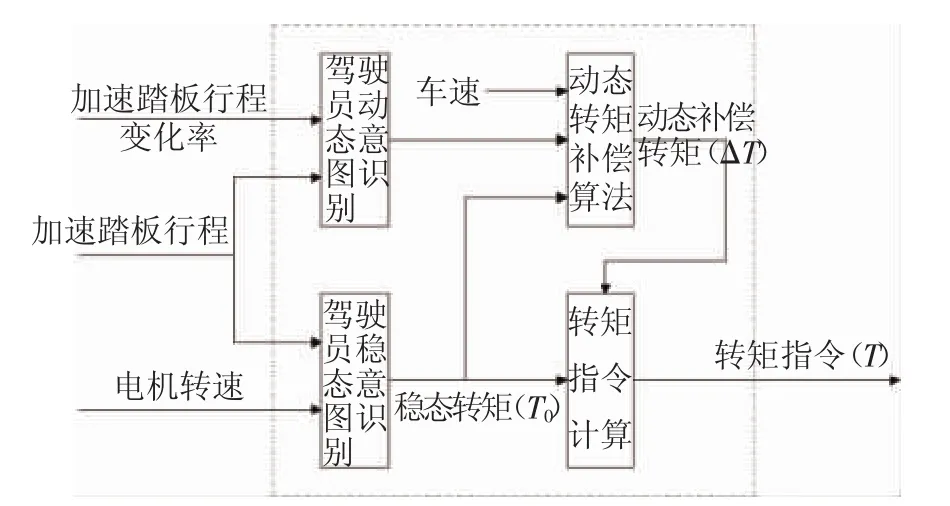
图2 纯电动汽车驱动控制策略结构图
1.1 稳态意图识别
稳态转矩比例系数是指电机实际转矩与额定转矩的比值。虽然图1中的曲线2可满足驾驶员的驾驶需求,但其没有考虑到驾驶员在不同加速状态下所表达的加速意图,也没有考虑到在急加速过程中电机的过载运行特性。文章通过对电机的典型工作点进行分段3次埃尔米特插值,得到了不同加速踏板开度对应的稳态转矩比例系数。根据纯电动汽车的电机过载工作特性,将加速踏板分为巡航区、常用加速区及急加速区3个区域。其中,巡航区对应着电机的额定运行范围,此区域内汽车加速能力相对较弱,但可以持续稳定运行;常用加速区对应着电机的2倍过载运行范围,此区域内汽车可满足常用加速需求,且持续稳定运行时间相对较长;急加速区对应着电机的3倍过载运行范围,此区域内汽车具有较好的加速性能,但是持续稳定运行时间较短。根据对纯电动汽车加速踏板区域的划分,取3个区域的4个边界点为典型工作点,分别为零点(不运行)、额定运行工作点、2倍过载运行工作点及3倍过载运行工作点,并结合驾驶员对加速踏板操作习惯的统计规律,确定了典型工作点下加速踏板行程与稳态转矩比例系数的关系[4],如表1所示。

表1 纯电动汽车稳态转矩比例系数表
稳态转矩是稳态转矩比例系数和当前电机转速下的额定转矩的乘积,如式(1)所示。

式中:T0——电机在转速n下的稳态转矩,N·m;
K——稳态转矩比例系数;
T(n)——电机转矩,N·m;
n——电机转速,r/min。
由式(1)可以得到电机在不同加速踏板开度和转速下的转矩曲线,如图3所示。
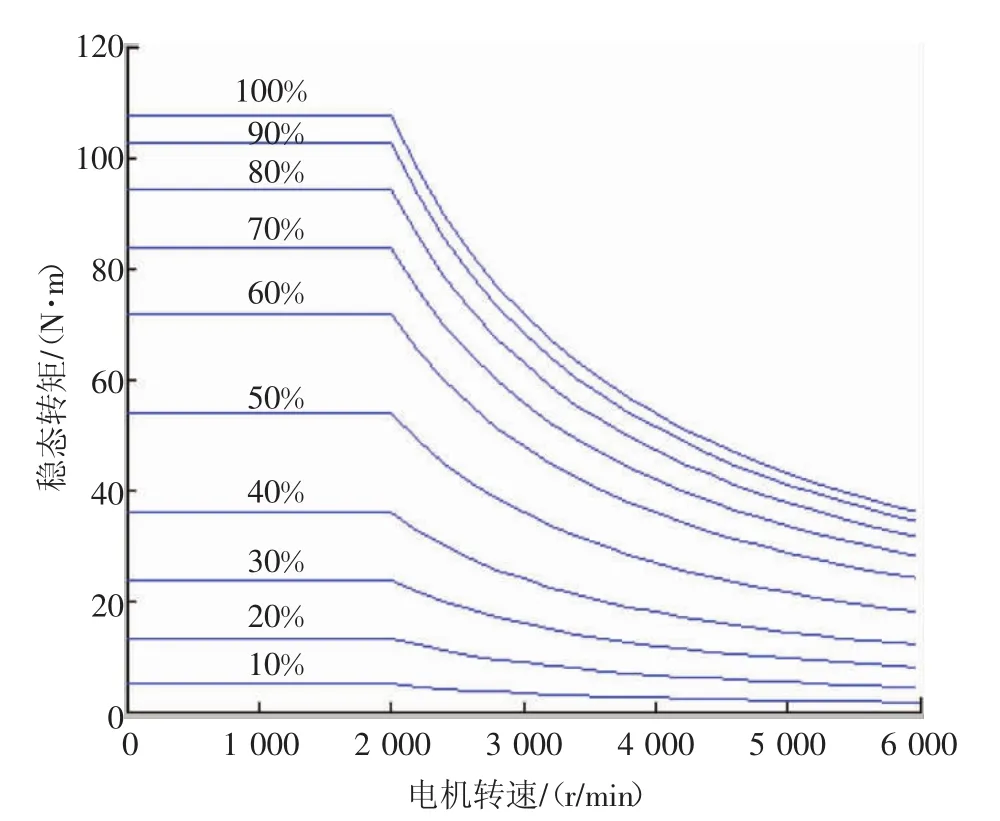
图3 纯电动汽车电机的工作特性曲线图
1.2 驾驶员动态意图识别
从图1中可以看出,曲线2所示的控制策略可以反映驾驶员的稳态意图,然而驾驶员采用不同速率踩踏加速踏板的响应基本相同,即没有考虑驾驶员踩踏加速踏板这一操作的动态意图。文章选取加速踏板开度变化时的电机输出转矩变化率(J/(N·m/s))来表征驾驶员的动态意图[5]。
1.3 动态补偿转矩的计算
由图3可以看出,当电机转速超过基速以后,电机输出转矩随着电机转速的升高而降低。同时,在加速踏板变化率逐渐变为0的过程中,稳态转矩趋于稳定,但汽车还处于非稳定的状态中。因此,为了反映出驾驶员的动态意图,需要在加速踏板变化率为0以后对电机转矩进行补偿。动态转矩补偿算法分为稳态车速计算模块和动态补偿转矩计算模块2个部分。
1.3.1 稳态车速计算模块
稳态车速是指在稳态转矩的驱动下汽车达到稳定状态时的车速。文章中将稳态车速定义为在平路上按某个车速稳定运行。因此在平路上,稳态车速只与稳态转矩和传动比等相关,其关系式,如式(2)所示。

由式(2)可得:

式中:i0——主减速器传动比;
ig——变速器传动比;
η——传动系统效率;
m——整车质量,kg;
g——重力加速度,N/kg;
f——滚动阻力系数;
CD——风阻系数;
A——迎风面积,m2;
vs——稳态车速,km/h;
r——车轮半径,m。
1.3.2 动态补偿转矩计算模块
将汽车的运行状态分为4个阶段:1)踏板稳定、车速稳定;2)踏板变化、车速变化;3)踏板稳定、车速变化;4)踏板变化、车速稳定。基于此,设计动态转矩补偿算法,如图4所示。
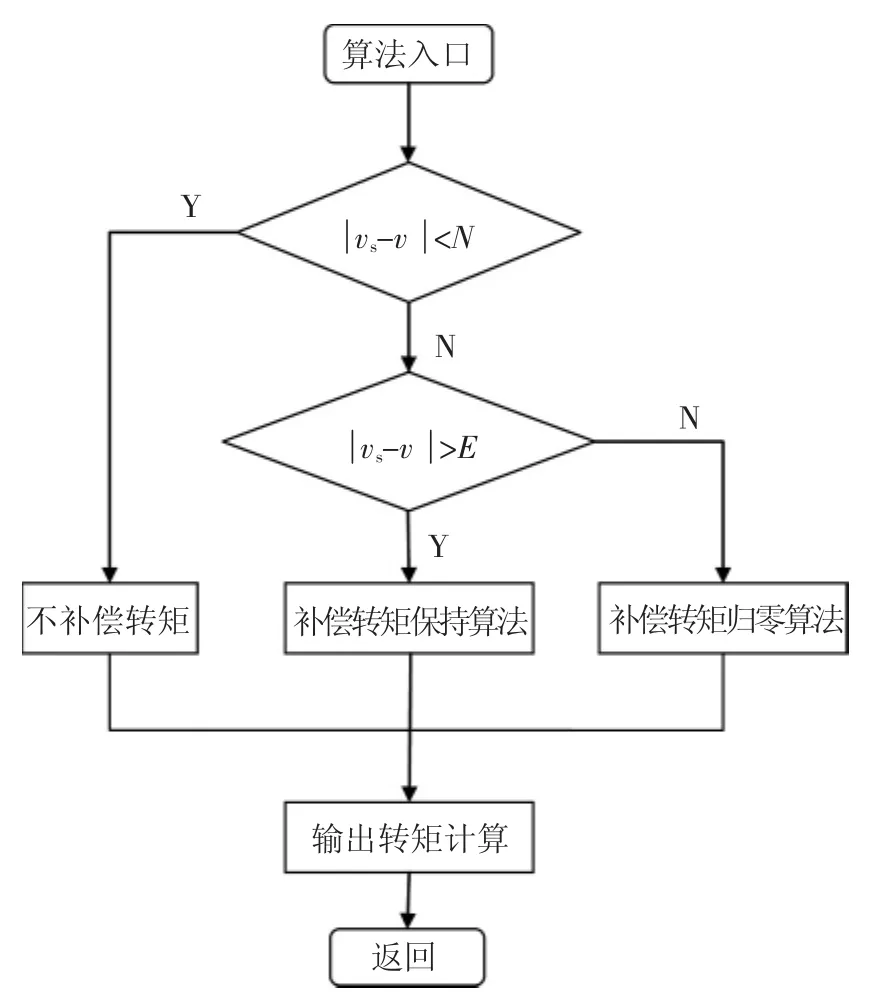
图4 纯电动汽车动态转矩补偿算法流程图
1)踏板稳定车速稳定阶段。此阶段内汽车处于稳定状态,无需进行转矩补偿,如式(4)所示。

2)踏板变化、车速变化阶段。此阶段为加速踏板开度变化的阶段,时间较短。由于稳态转矩的变化可带来一定的冲击度,因此,不进行动态转矩补偿,但需对电机输出转矩的变化率进行计算,作为动态补偿转矩的计算依据,如式(5)所示。
式中:J(i)——第i次调用动态补偿转矩最大值计算算法时的驾驶员允许最大冲击度,m/s3;
S(i)——驾驶员允许最大冲击度累积,m/s3;
Jav——驾驶员允许最大冲击度的累积平均值,m/s3;
i——次数。
3)踏板稳定、车速变化阶段。此阶段内踏板开度已经处于稳定状态,但是汽车仍在加(减)速,因此需要根据驾驶员的动态意图对电机的输出转矩进行补偿。根据车速与稳态踏板开度对应的稳态转速之间的差值,将动态转矩补偿过程分为补偿转矩保持阶段和补偿转矩减小阶段。

式中:td——驾驶员的反应时间,s。

1.4 输出转矩计算
动态补偿转矩计算流程,如图5所示。
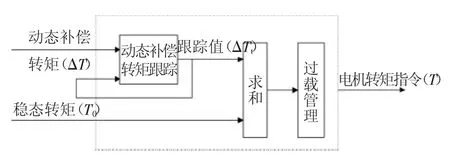
图5 转矩指令计算算法结构图
2 仿真研究
在MATLAB/Simulink平台里建立纯电动汽车动力性模型,对文章所提出的基于驾驶员意图识别的控制策略进行仿真,仿真所采用的整车参数,如表2所示。图6示出3种不同工况的加速曲线,曲线1为慢加速工况,曲线2为正常加速工况,曲线3为急加速工况。分别对这3条加速曲线进行驱动控制策略仿真,图7示出仿真结果。

表2 某纯电动汽车整车参数表
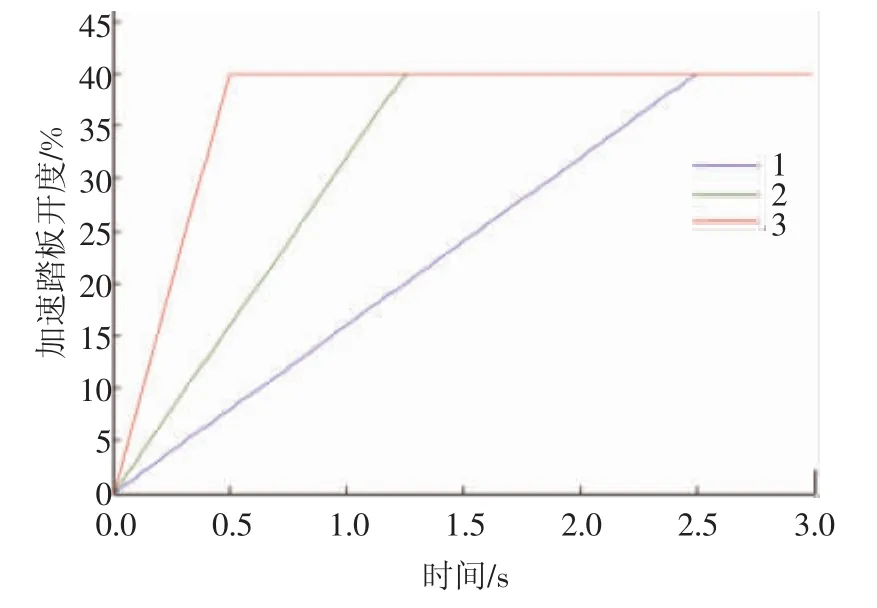
图6 纯电动汽车驾驶员意图识别控制策略下加速踏板行程曲线图

图7 纯电动汽车驱动控制策略仿真结果曲线图
图7中,曲线1,2,3分别为基于驾驶员意图识别控制策略下在慢加速、正常加速和急加速时的仿真结果,曲线 1’,2’,3’分别为采用线性驱动控制策略下在慢加速、正常加速和急加速时的仿真结果。
由图7可知,采用线性驱动控制策略时,电机输出转矩不会随加速踏板开度变化率的变化而变化,即没有反映出驾驶员的动态意图。而采用基于驾驶员意图的控制策略时,在电机转速超过基速以后,电机转矩的下降速率会变低,汽车加速时间有了明显的提升,而由对应于不同加速踏板开度变化率的曲线1,2,3可知,加速踏板开度变化率越大,即驾驶员加速需求越迫切,加速时间则越短。综上所述,采用基于驾驶员意图的驱动控制策略,既可以保证驾驶员的稳态意图,也可以满足驾驶员的动态意图。
3 结论
文章考虑到驾驶员的驾驶意图,将其分为稳态意图和动态意图,基于此,提出了基于驾驶员意图识别的纯电动汽车驱动控制策略,此策略可以兼顾纯电动汽车的动力性和操控性。
仿真结果表明,相比于线性驱动控制策略,基于驾驶员意图识别的驱动控制策略在根据驾驶员的稳态意图保证汽车操控性的同时,还能够根据驾驶员的动态意图保证汽车的动力性。
