混联式混合动力汽车功率分流装置建模*
2018-12-08白海范永臻郭晓辉
白海 范永臻 郭晓辉
(1.广西师范大学职业技术师范学院;2.科力远混合动力技术有限公司上海分公司;3.陕西职业技术学院航空服务与汽车工程学院)

混联式混合动力汽车兼具串联式和并联式混合动力汽车的优点,并以多种组合形式对汽车进行驱动,可以使车辆的整备质量降低,经济性有所提高,不仅动力性能可以达到传统内燃机汽车的水平,而且有效地降低了有害气体的排放,实现“超低污染”的目标。混合动力汽车能量管理控制策略的优化设计需要建立在完整的整车仿真模型基础之上。功率分流装置是混合动力系统功率分流的核心部件,相比输入功率分流与输出功率分流系统,复合功率分流系统具有全车速范围内传动效率高、电机成本低等优点,因而得到广泛的应用。双行星排齿轮机构属于典型的复合功率分流模式,文章运用Simulink软件,针对混联式混合动力汽车复合功率分流装置特有的双行星齿轮机构建立了准确合理的功率分流装置模型,该模型对进一步研究该机构特性至关重要。
1 混联式混合动力汽车动力系统结构
图1示出混联式混合动力汽车动力系统的结构。该结构采用的功率分流装置使用拉维娜行星齿轮机构[1-2],它的特点是前行星轮排增大,后行星轮排减小,达到储能和加速的目的。
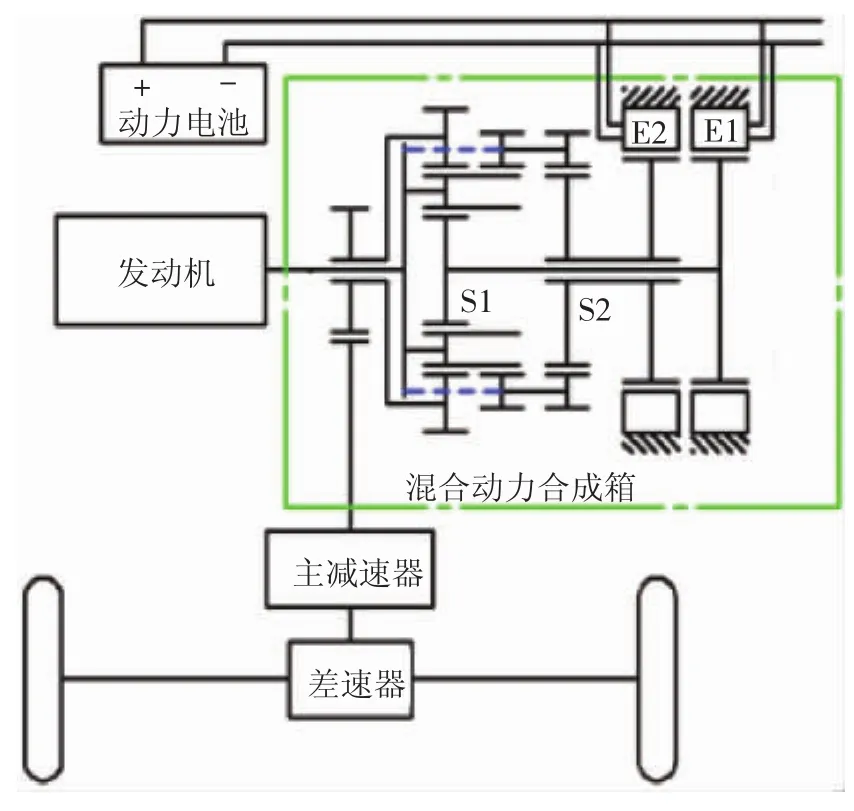
图1 混联式混合动力汽车功率分流混合动力系统结构示意图
混联式混合动力汽车动力系统中,发动机与混合动力变速箱中的行星架经由扭转减振器相连接,电机1(E1)与混合动力变速箱中的太阳轮1(S1)相连接,电机2(E2)与混合动力变速箱中的太阳轮2(S2)相连接,动力电池由电机控制器进行控制。
2 功率分流装置
功率分流装置是混联式混合动力汽车动力系统的核心部件。通过功率分流装置,发动机转速与整车车速解耦,实现无极变速功能,进而优化发动机工作点,提高动力总成的工作效率,降低发动机的油耗。行星排齿轮机构是实现功率分流的核心装置,通过采用双行星排齿轮机构,实现布置形式的改进,衍生出多种功率分流装置。
双行星排机构是四轴功率分流系统,主要包括S1、S2、行星架(PC)以及齿圈。基于单行星排机构原理,通过改进拉维娜复合行星齿轮机构[3],双行星排机构可实现2个行星排复合工作,具有行星排齿轮个数少、结构紧凑等特点。图2示出双行星排齿轮机构运动简图。
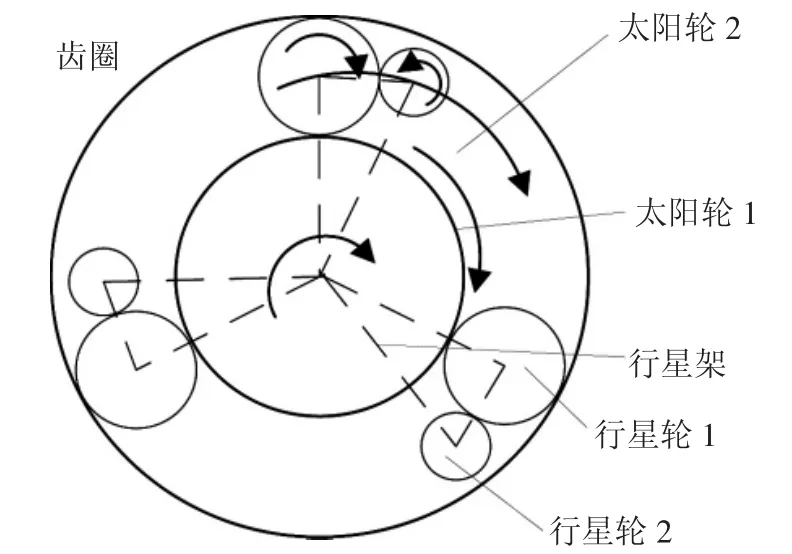
图2 功率分流装置的双行星排齿轮机构运动简图
双行星排齿轮机构由前行星排和后行星排构成。前行星排由S1、行星轮1(PG1)和齿圈共同组成;后行星排由S2、行星轮2(PG2)、PG1和齿圈构成。前行星排与后行星排共同使用PG1和齿圈。对于前行星排,PG1与齿圈啮合,PG1与S1啮合,PG1同时与PG2啮合;对于后行星排,PG2与S2啮合,PG2同时与行PG1啮合。PG1与PG2共同固定于PC上。
双行星排齿轮机构特性主要体现为四轴转速约束关系和转矩约束关系,根据行星排受力分析以及能量守恒定律,可得四轴转速关系和转矩关系如下:

式中:nS1,nS2,nPC,nR——太阳轮1、太阳轮2、行星架、齿圈的转速,r/min;
TS1,TS2,TPC,TR——太阳轮1、太阳轮2、行星架、齿圈的转矩,N·m;
i1——前行星排的传动比,在等效杠杆图中代表太阳轮1与行星架之间的等效杠杆距离;
i2——后行星排的传动比,在等效杠杆图中代表太阳轮2与行星架之间的等效杠杆距离。
根据传动比的定义,i1和i2亦满足如下基本关系式:

式中:ωS1,ωS2,ωR——太阳轮1、太阳轮2、齿圈的角转速,rad/s;
ZR,ZS1,ZS2——齿圈、太阳轮1、太阳轮2的齿数;
rR,rS1,rS2——齿圈、太阳轮1、太阳轮2的半径,m。
3 复合功率分流模式
发动机、电机及功率分流装置之间可采用多种组合方式,以实现不同的动力总成拓扑结构。根据动力总成拓扑结构中功率分流装置所在的位置不同,功率分流混合动力系统分为输入功率分流、输出功率分流及复合功率分流3种模式[4]。
文章研究的双行星排齿轮机构属于复合功率分流模式,将双行星排齿轮机构布置在传动系统的输入端和输出端。图3示出混合动力汽车复合功率分流系统拓扑结构。2个功率分流装置(PGD1,PGD2)串联,发动机(ICE)与E1,E2均单独连接到功率分流装置的输入轴上,整车驱动轴连接到传动系统输出端的功率分流装置输出轴上。
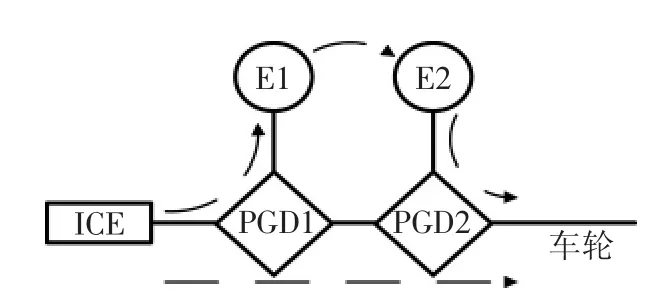
图3 混合动力系统复合功率分流系统拓扑结构示意图
图4示出混合动力系统复合功率分流系统等效杠杆图。相比输入功率分流系统与输出功率分流系统,复合功率分流系统增加了1根电机轴,实现电机转速与发动机转速和车速解耦,对E2工作转速的要求大大降低。在全车速范围内,由2个电机协同工作,以平衡发动机的转矩,E1的工作转矩范围显著地降低。系统机械点由1个增加到了2个[5],提高了系统在全车速范围内的传动效率。

图4 混合动力系统复合功率分流系统等效杠杆图
4 混合动力系统复合功率分流装置建模
四轴行星齿轮机构模型,如图5所示。根据四轴行星齿轮机构物理连接,通过齿轮齿数比确定转速和转矩的关系。其中,S1与PG1啮合,齿数比为1.09,PG1固定于PC之上,三者以行星-行星(Planet-Planet)模块连接;S2与PG2啮合,齿数比为1.35,PG2固定于PC之上,三者以Planet-Planet模块连接;PG1与PG2啮合,齿数比为1.09,PG1与PG2均固定于PC之上,三者均以Planet-Planet模块连接;PG1与齿圈啮合,齿数比为2.92,PG1、PC以及齿圈以齿圈-行星(Ring-Planet)模块连接。由于行星齿轮机构中齿轮转动惯量较小,可忽略不计。然而,发动机和电机的转子转动惯量以及整车当量转动惯量较大,转矩传递过程中,只有部分转矩用于转动部件加速。四轴行星齿轮机构输入输出模型,如图6所示。转矩传感器模块(Torque Sensor)用于输入输出转矩传递,并将传动轴上实际转矩物理量转化为数字显示量。转速传感器模块(Speed Sensor)实现将传动轴转速物理量转变为数字显示量。四轴的转动惯量分别在发动机、电机以及整车动力学模型中表示。
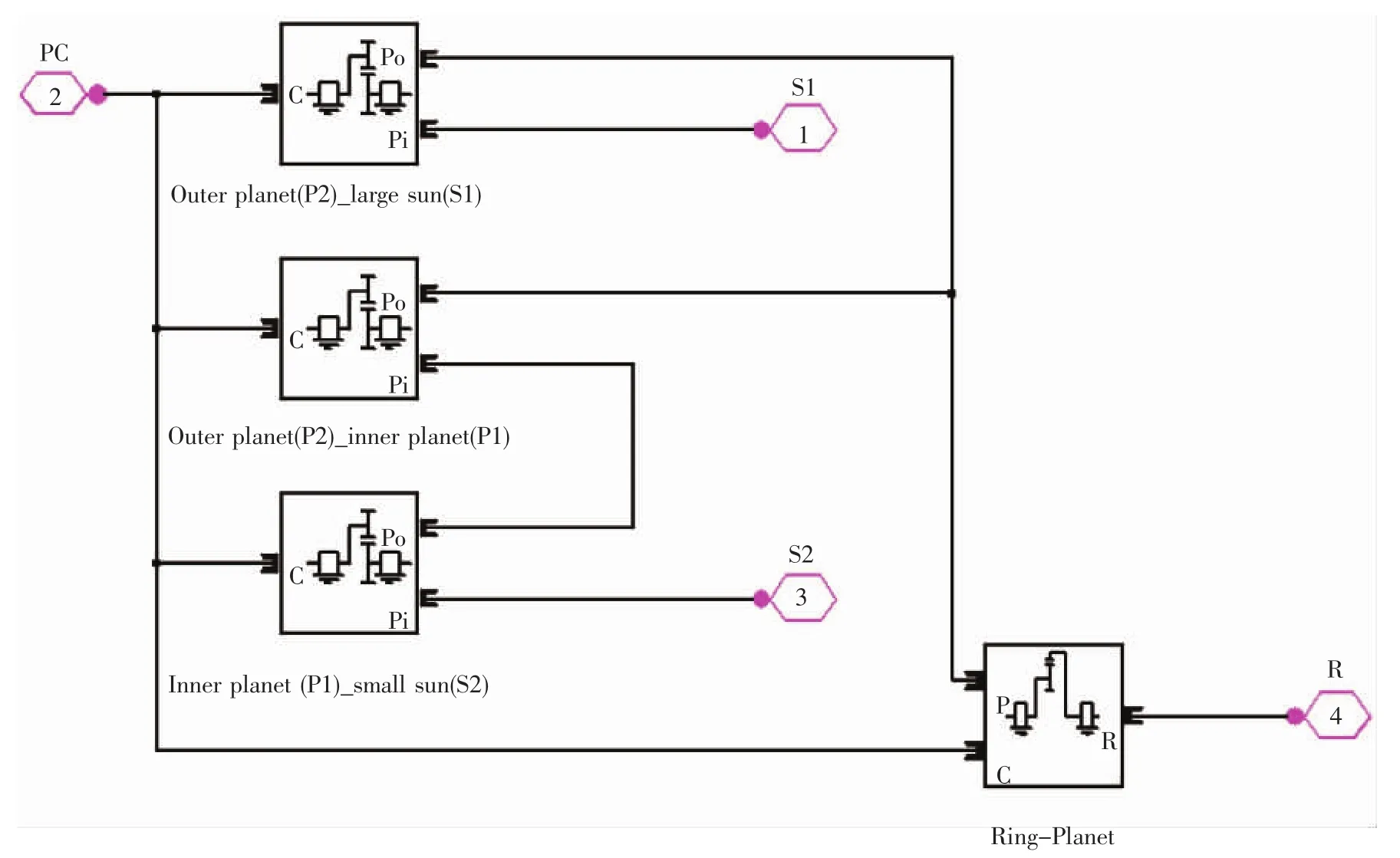
图5 四轴行星齿轮机构模型

图6 四轴行星齿轮机构输入输出模型图

2018年10月基本型乘用车(轿车)生产汇总表
5 结论
与输入功率分流和输出功率分流模式相比,文章所研究的混合动力系统为复合功率分流模式,采用双行星排齿轮机构,优化了电机的转速和转矩工作点,增加了系统机械点。针对混联式混合动力汽车复合功率分流装置特有的双行星齿轮机构,运用Simulink软件进行建模,进而得出四轴行星齿轮机构模型及其输入输出模型,为研究该机构特性提供了重要的仿真试验基础。
