基于4阶累积量粒子群的转子故障特征分离方法
2018-12-05岳晓峰
孙 鑫,岳晓峰
(1.长春工业大学 机电工程学院,长春 130012;2.白城师范学院 机械工程学院,吉林 白城 137000)
0 引言
转子是旋转机械中的重要组成部分,由于转子在机械设备运行时长时间处于高速旋转状态下,运行工况复杂[1]。因此,及时有效的对转子进行状态监测和故障特征识别,对保证旋转机械正常的运作,减小事故率和提高寿命具有十分重要的意义。
采用传感器对振动信号进行采集,采集到的振动信号由多个信号混合,这些信号由不同的振源发出,如何将转子的故障特征信号从众多的振动信号和噪声干扰中分离出来是关键问题[2]。使用盲源分离技术处理信号在这方面具有独特的优势,盲源分离(Blind source separation ,BSS)是指在源信号的个数和传播途径都未知的情况下,根据源信号的统计特征,从观测到的复合信号中恢复未知源信号的过程。一方面,基于盲源分离算法对转子振动特征识别及提取,可以寻找合适的目标函数将转子振动特征及故障信号和噪声干扰信号满足相互独立的假设条件;另一方面盲源分离的核心算法是构建合适的分离矩阵,分离出主要振动信号,从而更准确的进行故障特征识别。
在近几年的振动信号处理领域中,盲源分离已经成为热门方法之一,自20世纪80年代以来,盲源分离技术得到了迅速的发展和广泛的应用[3-5],如无线通讯、语音识别、噪声消除、生物医学信号处理、地震信号处理、机械故障诊断等多个重要领域[6-8]。近些年来更倾向于将智能算法应用到盲源分离中,基本粒子群算法作为一种群体智能算法,具有调整参数少,易于实现等优点,但在优化过程中收敛速度和搜索精度等方面都有待改善。本文提出一种基于4阶累积量的粒子群算法,改善了惯性权重的选取方式,使算法的收敛速度加快,不会陷入局部最优,较好的将混合信号分离。
1 算法基本模型
传感器采集到的振动信号来源于多个振源,复合信号和源信号之间的关系可用下列混合模型表示:
x(t)=As(t)+n(t)
(1)
式中,x(t)为n个传感器采集到含有噪声干扰的观测信号,x(t)=[x1(t),x2(t),...,xn(t)]T;A为一个满秩的n×m维未知混合矩阵;s(t)为m个源信号,s(t)=[s1(t),s2(t),...,sn(t)]T;n(t)是n维的噪声干扰信号,且n(t)=[n1(t),n2(t),...,nn(t)]T。
混合矩阵A和源信号都未知,故盲源分离算法通过构建一个满秩的分离矩阵W,使得变换后的输出y(t)是未知源信号s(t)的拷贝或估计[9],y(t)=[y1(t),y2(t),...,yn(t)]T,公式表达为:

(2)
式中,如果yi(t)之间尽可能的保持独立,那么y(t)就可以近似认为是s(t)的估计,也就是说,盲源分离就是通过相应的算法确定分离矩阵W的过程[10]。
由于盲分离仅仅是通过观测信号x(t)来估计源信号及混合矩阵,可利用的已知数据较少,为解决此问题,在研究前期要作一些假设:①假设转子振动特征数据分量和噪声干扰分量相互统计独立,且为加性高斯白噪声;②假设源信号中最多包含一个服从高斯分布的信号。
设W为分离矩阵,A为混合矩阵,在不考虑噪声影响的情况下得到:
y(t)=Wx(t)=WAs(t)
(3)
2 粒子群算法
对复合信号x(t)进行分离,使用粒子群算法(Particle Swarm Optimization,PSO) 优化求解式(2)中的分离矩阵W。粒子群算法是是一种具有全局寻优能力的优化工具[11]。首先初始化产生一群随机粒子,每个粒子都具有本身的一个飞行速度向量和位置向量,其中包含粒子本身的飞行方向和距离以及表示潜在解优劣的信息,利用粒子的运动状态和适应度函数不断迭代更新粒子的速度和位置,最终找到全局的最优位置,即是算法的最优解。
假设在一个D维的目标搜索空间中,有n个粒子构成的粒子群X=(X1,X2,...,Xn),其中每个粒子代表一个潜在的解,其中第i个粒子的位置和飞行速度分别可以表示为Di=(Di,1,Di,2,...,Di,N)和Vi=(Vi,1,Vi,2,...,Vi,N)。粒子在每一次的迭代过程中,通过跟踪两个极值达到自己的最优位置。每次迭代时,粒子不停追踪自身所寻求的最优解,称为是个体极值Pi=(Pi,1,Pi,2,...,Pi,N),也可看作粒子的飞行经验;当全部粒子种群寻求到全局的最优解,即被称为全局极值Pg=(Pg,1,Pg,2,...,Pg,N),也可称为群体经验,采用下列公式来更新速度和位置:
(4)
(5)
式中,t为当前迭代次数;c1、c2为学习因子,是粒子跟踪自己历史最优值和群体最优值的权重系数,为非负数;r1、r1是 [0,1]内均匀分布的随机数。
3 基于4阶累积量粒子群的盲源分离算法
Shi在1998年最早提出将惯性权重应用到粒子群算法中,加入惯性权重后,粒子的更新速度和收敛性能都会受到直接影响[12],如下式所示:
(6)
式中,ω为惯性权重,是PSO算法重要参数,控制了算法的历史数据对当前结果的影响程度。
在进行算法迭代的不同时期,利用ω值变化产生的不同效果,使粒子的搜索能力和收敛速度达到平衡。当ω较大时,粒子的全局搜索能力强,能够比较迅速的跳出局部最优;当ω较小时,粒子具有较强的局部搜索能力,收敛速度加快。由此,ω可以在区间[0.9,0.4]内线性递减,在前期ω可以取有利于全局搜索的较大的值,不易陷入局部最优,产生振荡现象,但算法搜索效率低;在后期ω可以取具有良好局部搜索能力的较小值,加速收敛。
基于上述分析,提出随机惯性权重ω的公式如下:
(7)
式中,ωi(t)是第i个粒子在第t次迭代时的惯性权重,N为最大迭代次数,ωmin和ωmax分别为惯性权重的最小值和最大值。
迭代中止条件根据具体问题一般选为最大迭代次数或粒子群迄今为止搜索到的最优位置满足预定最小适应阈值。
这里为了确定分离信号之间具有独立性,采用4阶累积量来进行度量。由大数定理可以推理出,多个源信号复合后,信号趋向高斯性,反之,源信号的非高斯性与复合信号相比,源信号的非高斯性更强,因而可以通过衡量分离信号的非高斯性来判断复合信号的分离情况,当分离信号的非高斯性达到最大时,可认为达到分离效果[13]。
本文依据要对采集到的复合信号进行非高斯性分离的准则,确定本文适应度函数为:
(8)

而上述目标函数对于分离矩阵W,f(y)越大,即信号的4阶累积量越大,说明非高斯性越强[14],只有在E(yyT)=I的情况下,函数才取得极大值,可以认为实现了盲源分离。
本文盲源分离算法具体步骤如下:
(1)首先对混合信号x(t)进行预处理:中心化和白化。
(2)根据分离矩阵维数的大小确定粒子维数。
(3)对粒子群进行初始化,以每个粒子的位置表示分离矩阵W,随机产生一定数量分离矩阵作为粒子的初始位置并对每个粒子的速度初始化;设置最大迭代次数N,初始化学习因子c1、c2及惯性权重ω的最大值与最小值。
(4)根据公式(3)可知,分离矩阵与混合信号可计算出源信号,利用公式(8)计算得出初始状态下各粒子的适应度,并通过比较找到初始状态下的个体极值和全局极值。
(5)根据公式(6)更新每个粒子当前位置,计算每个粒子当前适应度值。
(6)依据各粒子的适应度迭代更新Pi、Pg。
(7)利用公式(7)确定每个粒子在当前迭代中的惯性权重ω调整后的取值。
(8)将第7步得到的惯性权重带入式(6)再结合式(5)分别迭代更新粒子的速度和位置。
(9)进入迭代循环状态,如果达到预设的迭代中止条件,则输出解,根据式(2)得到分离信号。否则返回第(4)步继续搜索。
基于4阶累积量的粒子群算法流程图如图1所示。

图1 基于4阶累积量的粒子群算法流程图
4 仿真结果
为了验证算法的有效性,针对性选择4种信号,采样长度为1024,源信号产生函数如下:
其中,源信号中,s1(t)模拟转子周期振动信号,s2(t)模拟转子不对中故障特征信号,s3(t)模拟转子冲击故障特征信号,s4(t)模拟噪声信号,s1(t)、s2(t)、s3(t)、s4(t)的时域波形图和频谱图分别如图2、图3所示。
本文采用基于4阶累积量的粒子群方法分离混合信号,设置最大迭代次数为100,惯性权重的最小值0.4和最大值为0.9。初始化粒子的搜索范围和速度分别为[-10,10]、[-1,1]。

图2 源信号的时域波形图
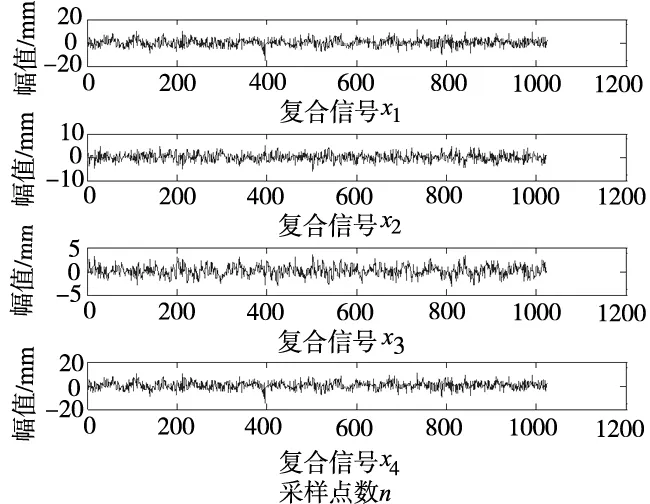
图3 源信号的频谱图
将上述4路源信号通过随机产生的正态分布矩阵A进行线性叠加产生复合观测信号x1(t)、x2(t)、x3(t)、x4(t):
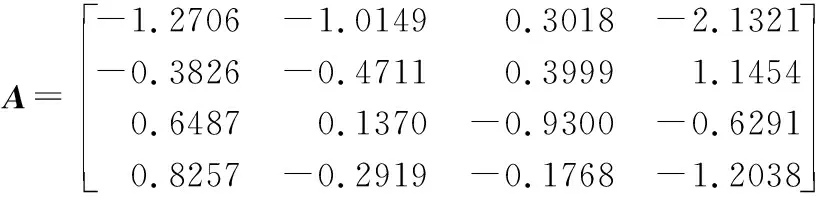
复合信号的时域波形图和频谱图分别如图4、图5所示。
图4 复合信号的时域波形图

图5 复合信号的频谱图
从图5可以看出,4路复合信号的频率成分都比较复杂,说明这些信号是来自不同类型振动源,采用基于粒子群的盲源分离算法对以上信号进行分离,分离信号的时域波形图和频谱图分别如图6、图7所示。

图6 粒子群算法提取的时域波形图

图7 粒子群算法提取的频谱图
由图7的分离结果可见,第1个分离信号的频段范围无明显特征,应该为噪声信号;第2个分离信号频率特征表现为模拟转子不对中信号;第3个分离信号为0.8Hz及其倍频和边频成分,因此判断为模拟转子的冲击信号;第4个分离信号为固定的频率信号,判断该信号为模拟转子周期振动信号。分离信号和源信号之间会存在幅值和顺序不一致的情况,这是由于盲源分离算法具有这两种不确定性,但这些并不影响对振动信号特征的识别,因为信号中的信息主要反映在波形上,而非信号幅值与顺序上。
基于4阶累积量的粒子群算法收敛曲线如图8所示,从图中可以看出当迭代次数为15时,算法已基本收敛,其4阶累积量基本保持不变,表明算法分离效果好。

图8 基于4阶累积量的粒子群算法收敛曲线
为了更准确的评价分离信号与源信号的准确程度,构建相似系数矩阵定量的进行评价。相似系数定义为:
(9)
式中,当yi=csj,c为常数时,ξij=1,确定分离信号在幅度上存在差异;当原信号与分离信号相互独立时,ξij=0。也就是说,当相似系数矩阵的每一行和每一列都有且仅有一个元素接近1,且其他所有元素都接近于0时,可以认定该算法达到分离效果。
求得相似系数矩阵:
公式中下划线系数表示为分离信号与源信号之间的相关系数。
可以看出,基于粒子群算法的分离信号与源信号的相似系数很高,表明该算法能够将各路源信号从复合信号中分离出来。
5 结论
本文运用基于信号4阶累积量和粒子群算法的盲源分离算法,该算法的惯性权重可以随着迭代不断地调整,以达到较好的迭代效果,依据信号的4阶累积量最大化为目标函数,确定最优分离矩阵,对复合信号进行分离,从中分离提取转子故障信号。仿真验证了该算法的可行性,能够有效地对多种类型的源信号复合后的信号进行分离,同时具有较快的收敛速度和较高的分离精度。
