基于方位特征方程的2T2R并联机构拓扑综合与分类
2018-12-04孙驰宇沈惠平袁军堂杨廷力
孙驰宇 沈惠平, 袁军堂 杨廷力
(1.南京理工大学机械工程学院, 南京 210094; 2.常州大学现代机构学研究中心, 常州 213016)
0 引言
目前,国内外并联机构型综合[1]的方法主要有:基于螺旋理论的方法[2-3]、基于位移子群的方法[4-5]、基于线性变换与进化形态学的方法[6-7]和基于方位特征集(POC)的方法[8-12]。这些理论方法都是以自由度、动平台的输出运动类型和数目为设计目标,通过设计各种支链及其在动、静平台之间的拓扑布置,构造拓扑结构,具有较好的系统性、严密性。但前3种方法需要较好的数学基础,一般工程技术人员较难理解和掌握。基于POC集的方法仅需简单的逻辑运算,每一步都有确定的计算公式或设计准则,简洁明了,易于掌握,有利于发现更多新机构。
4自由度并联机构中的三平移一转动SCARA机构[13-14]已有较多研究与应用,而两平移两转动(2T2R)机构却较少,但该类机构在工业上也有应用潜力,可应用于减振平台、坐标测量机、农业采矿振动筛、脚踝康复装置、结合工作台的运动构成五轴联动数控机床等,因此,对2T2R并联机构进行型综合研究仍具有一定的意义。
陈海等[15]基于螺旋理论提出了两平移两转动完全解耦并联机构构型综合方法;KUMAR等[16]基于螺旋理论对2T2R机构进行了型综合,并综合出简单支链构成的机构,以用于精密医疗器械;YOON等[17]提出了一种双平台3支链的2T2R并联机构;MERLET[18]对2T2R机构型综合进行了论述;LI等[19]依据约束综合方法,综合了一系列对称的2T2R机构;FAN等[20]基于进化形态与李群理论,对2T2R机构进行了型综合;WANG等[21]基于李群理论提出了两种具有较高转动能力的2T2R机构;杨廷力等[10]基于POC方法,综合了一部分2T2R机构。本文在文献[10]的基础上,通过设计新的HSOC(混合支链),设计10种新型2T2R构型。同时,依据支路结构和动平台数目,对综合出的机构进行分类,并对它们进行拓扑特征分析,得到其所包含的AKC、耦合度数、自由度类型和运动解耦性。
1 基本理论
为便于理解,给出基于POC方程的并联机构拓扑结构设计理论和方法[10]。
1.1 串联机构的POC方程
串联机构 POC方程为
(1)
式中MS——串联机构末端相对于定平台的POC集
m——运动副数
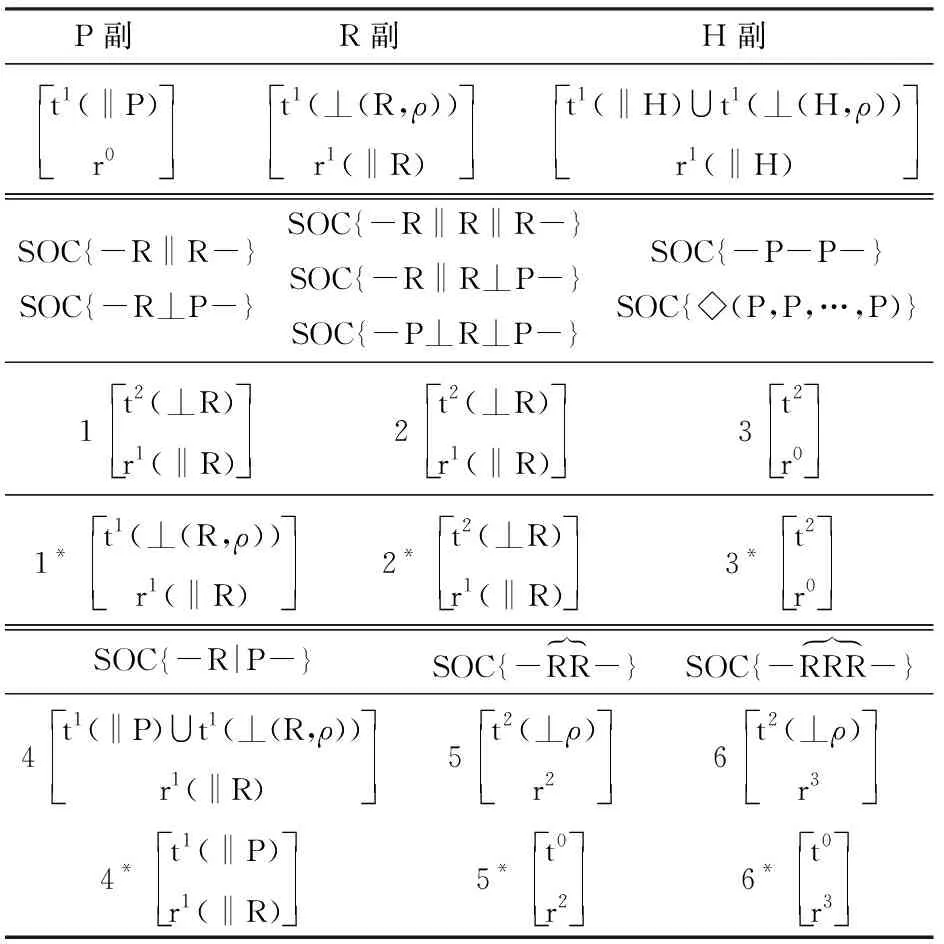
MJi——第i个运动副的POC集(表1)
Msub-SOCj——第j个子单开链(sub-SOC)的POC集
表1给出了仅包含R副与P副的12种sub-SOC及其POC集。
1.2 并联机构的POC方程
并联机构POC方程为
(2)
式中MPa——并联机构动平台的POC集
Mbj——第j条支路末端构件的POC集
ν——独立回路数
由式(2)可知,PM支路的POC集Mbj应满足
Mbj⊇MPa (3)
注: 标有*者,表示末端构件的基点o′不在运动副轴线上。
1.3 机构DOF公式
机构DOF公式为
(4)

式中F——机构自由度
fi——第i个运动副的自由度
ξLj——第j个独立回路的独立位移方程数
Mbj——第j条支路末端构件的POC集
1.4 并联机构型综合的一般过程
并联机构拓扑结构设计的一般过程,见文献[11]。
2 2T2R并联机构的拓扑结构综合
依据上述基本理论,给出2T2R并联机构的型综合过程和方法,并得到15种2T2R机构,其中10种为本文综合得到。
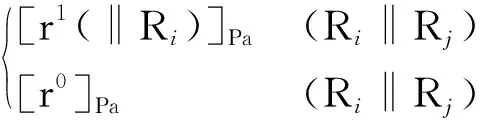
设计要求:设计4自由度2T2R的并联机构,且每条支链仅含一个驱动副,包含的P副只能为驱动副。即机构动平台实现的POC集为
2.1 确定支路的POC集
2.2 支路的结构综合
2.2.1单开链(Single open chain, SOC)支路的综合

(1)确定SOC支路的基本功能
② 支路的自由度为4,即F=dim{MS}=4。
(2)确定运动副的组合方案
由条件公式[21]
(5)
式中F1——支路自由度
mR——转动副数目
mP——移动副数目
dim{MS(r)}——支路POC集独立转动元素数
dim{MS(t)}——支路POC集独立移动元素数
且已知:dim{MS(r)}=2,dim{MS(t)}=2,可得:mR≥2,mP≤2。
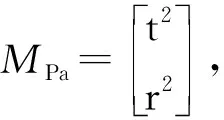
再由串联POC方程(式(1))及表1,可得运动副的组合方案为3种:4R、3R1P、2R2P。
(3)确定SOC支路包含的sub-SOC,并生成SOC支路
①方案1: 4R
由dim{MS(r)}=2及式(1)与表1之2可知,该支路可由一个sub-SOC{-R‖R‖R-}及一个R副串联而成,得到支路SOC{-R‖R‖R-R-},其基点o′位于末端R副轴线上。
②方案2: 3R1P
由dim{MS(r)}=2及式(1)与表1之2可知,该支路可由一个sub-SOC{-R‖R⊥P-}及一个R副串联而成,得到支路SOC{-P⊥R‖R-R-},其基点o′位于末端R副轴线上。
③方案3: 2R2P

从造字上看,“葬”字为会意字,本义为上下藉以草、中间为尸身。《易·系辞下》:“古之葬者,厚衣之以薪,葬之中野,不封不树。”所以,上文提到的皇甫谧苇席裹尸应该是最原始意义上的葬式。杨王孙要求“死则为布囊盛尸,入地七尺,既下,从足引脱其囊,以身亲土”(《汉书·杨王孙传》),这种裸葬的方式倒是比较新奇,也是最为直接的“入土为安”。其实,庄周、杨王孙和皇甫谧这些抗俗者都是比较激进的矫俗者,主要是在行为上更加标新立异和惊世骇俗。东汉范冉在《遗令敕子》中说:“吾生于昏暗之世,值乎淫侈之俗,生不得匡时济世,死何忍自同于世!”[15](P656)可以看做是激进抗俗者的心声流露。
(4)检验支路的POC集
由式(1)可知,以上3种方案所得的3条单开链支路都满足该支路的POC设计要求。
例如:SOC{-P⊥R‖R-R-}支路由sub-SOC{-R‖R⊥P-}及一个R副串联而成,将它们的POC集代入式(1),可得该支路的POC集


确定各SOC支路所包含的sub-SOC,并生成SOC支路的POC集。

易知,满足该POC集要求的支路结构有SOC{-S-S-R-}、SOC{-S-P-S-}等。
2.2.2复杂单开链(Hybrid single open chain, HSOC)支路的综合
当一条SOC的POC集与一子并联机构(sub-PM)末端的POC集完全相同时,称它们拓扑等效。HSOC支路综合就是一个将SOC支路替换为拓扑等效的sub-PM的过程。表3给出常用的sub-PM类型及与其对应的拓扑等效SOC,以便于HSOC支路的综合。
由表3及2.2.1节所综合出的SOC支路可得10种HSOC种支路。其中,(2T-2R)HSOC结构有3种,如图1所示;(3T-2R)HSOC结构有5种,如图2所示;(2T-3R)HSOC结构有2种,如图3所示。
为便于比较,表2列出了2.2.1节中叙述的12种SOC支路构型,并根据本节HSOC支路综合方法,衍生出10种HSOC支路构型,其中(3)、(7)、(8)、(9)、(10)为5种新构型HSOC结构。
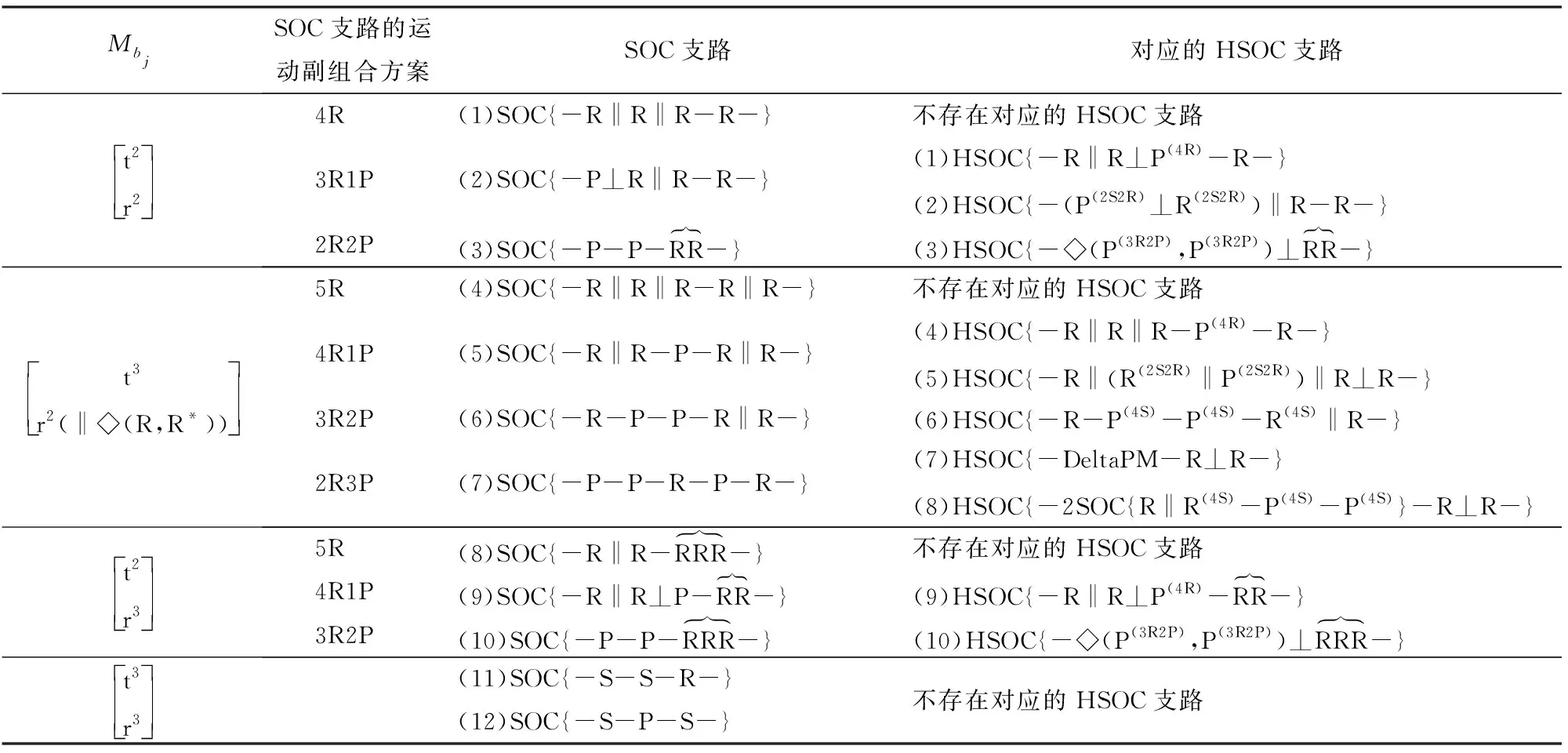
表2 SOC支路与HSOC支路的结构类型Tab.2 Branch structure types of SOC branch and HSOC branch
表3常用的sub-PM及其拓扑等效SOC
Tab.3Frequentlyusedsub-PMandtheirtopologicalequivalenceSOC
注: 表中No.4之sub-PM的4个S副,应保持平行四边形。
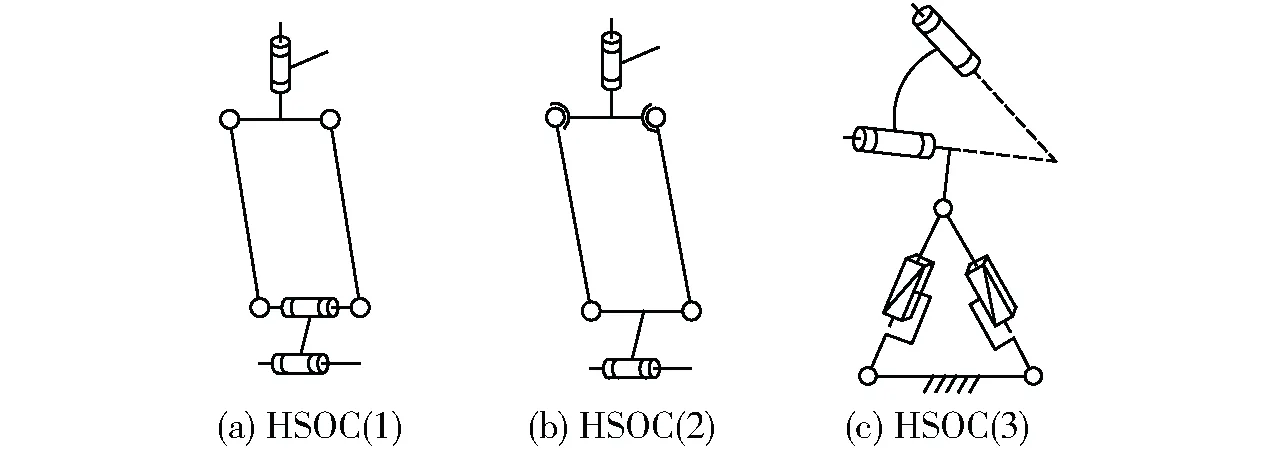
图1 (2T-2R)支路的3种结构类型Fig.1 Three types of (2T-2R) branch structure
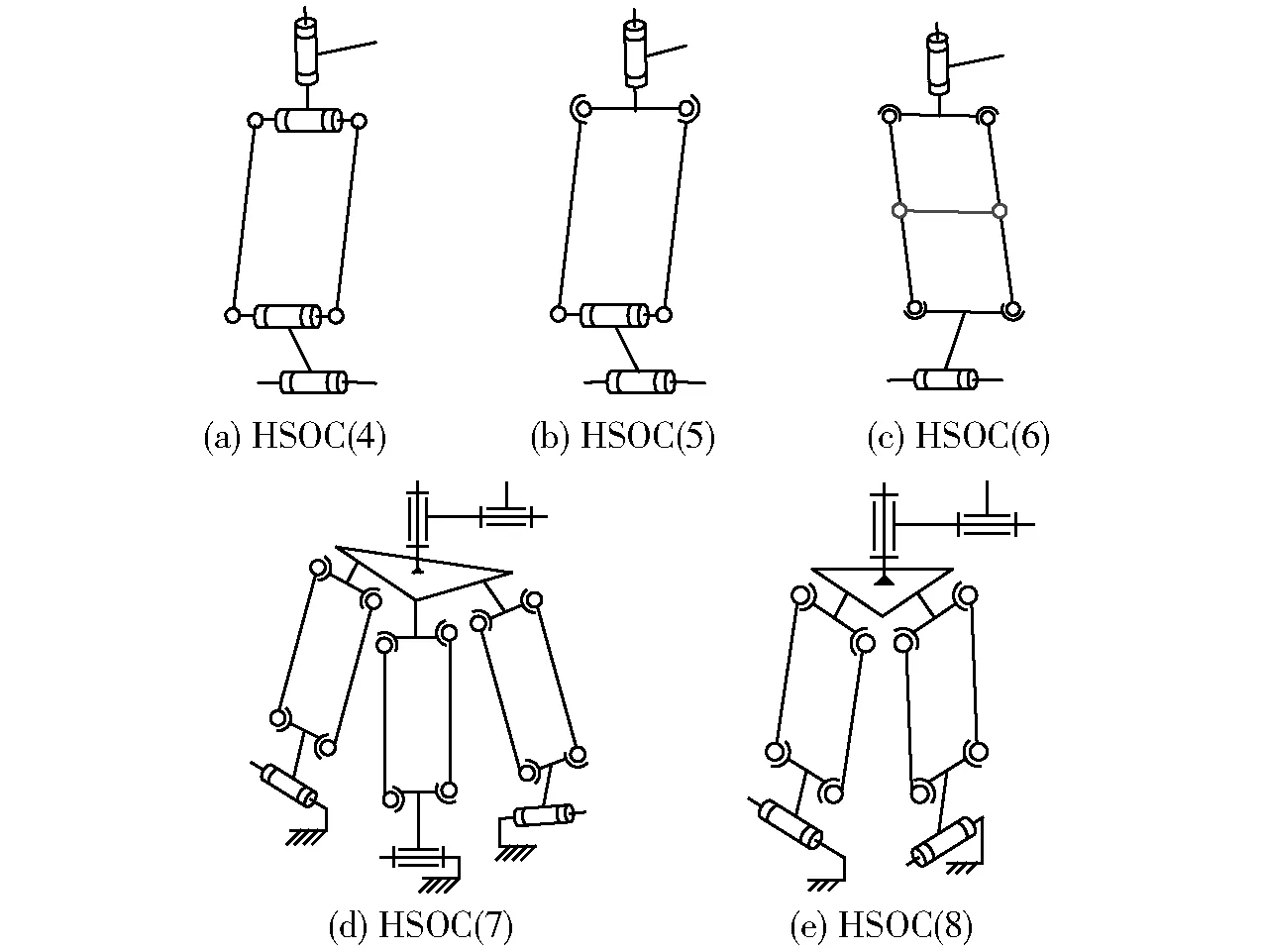
图2 (3T-2R)支路的5种结构类型Fig.2 Five types of (3T-2R) branch structure
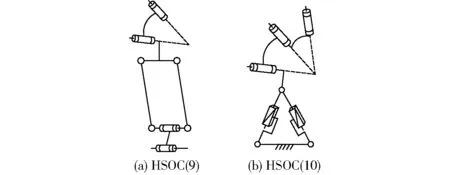
图3 (2T-3R)支路的2种结构类型 Fig.3 Two types of (2T-3R) branch structure
2.3 确定支路组合方案
由表2可得4种不含P副SOC支链结构(表2中SOC(1、4、8、11))以及10种HSOC支链结构,对它们进行组合以综合出满足POC集要求的2T2R并联机构,其中,考虑到每条支链应只含一个驱动副且所用驱动副皆处于同一平面,本文给出表2中部分支链组合结果的15种方案,如表4所示。
2.4 确定支路装配几何条件
由式(3)可知,综合出的并联机构的POC集所包含的元素,应多于或至少等于支链的POC集,因此,可运用支链间POC集交集运算,可以消去支路POC集中并联机构所不包含的POC集元素,现给出支路交运算的基本公式,以此可确定装配的几何条件。分为转动、移动两种情况:
转动元素:当满足式(6)~(8)中上式右侧的几何条件时,左侧的交集运算可不约束掉转动元素,POC集保持不变;当满足式(6)~(8)中下式右侧的几何条件时,左侧的交集运算将约束掉一个转动元素。
(6)
表4 (2T-2R) PM的支路组合方案Tab.4 Branch combination schemes of (2T-2R)PM
注: 标有*者,为本文首次提出的新机构。

(7)

(8)
移动元素:当满足式(9)~(11)中上式右侧的几何条件时,左侧的交集运算可不约束掉移动元素,POC集保持不变;当满足式(9)~(11)中下式右侧的几何条件时,左侧的交集运算将约束掉一个移动元素。
(9)

(10)
(11)
以表4中序号1的支路为例,确定其动定平台间的几何装配条件。
已知该机构4条支路结构相同,皆为SOC{-Rj1‖Rj2‖Rj3-Rj4-},j=1,2,3,4。基点o′为R14轴线上一点。
由2.2节可知,当基点取在末端R副轴线上时,该支路的POC集为
基点取在轴线外位置时,该支路的POC集为
将期望的并联机构动平台POC集及各支路的POC集代入并联机构POC集方程中(式(2)),可得

符号“⟸”表示式中右端所有支路POC集交运算得预期目标为左端的POC集。
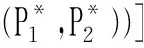
为实现动平台输出为2T2R,各条支路POC集交运算后需约束掉一个移动元素,且POC集的转动元素保持不变。由式(8)的上式逆运算可知:其装配几何条件为:R11‖R21‖R31‖R41, R14‖R24‖R34‖R44,且基点取在R14与R24的共线轴线上。按此装配几何条件得到的并联机构,如图4a所示,对应表4的序号1,该机构由4条相同的简单支链构成,见文献[10]。进一步,已知第1、2条支路POC集交运算已满足2T2R的型综合要求,即第3、4条支路可为包含2T2R方位特征集的无约束简单支路结构,如3T3R的SSR结构等,如图4b所示,对应表4的序号2。
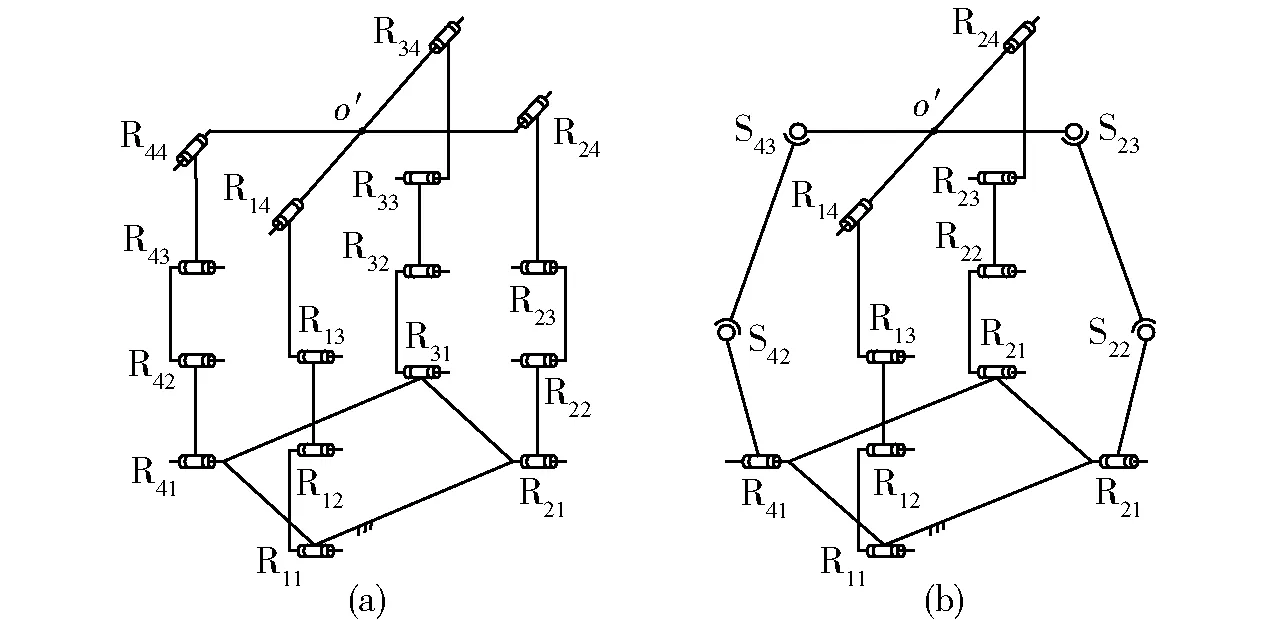
图4 SOC-(1)的两种(2T-2R) PMFig.4 Two types of (2T-2R) PM structure composed by SOC-(1)
按照上述步骤,现分别确定表4中其他支路组合方案的几何条件,得13种并联机构,如图5~12所示,简述如下:
(1) 按表4中第3、4组合方案综合出的并联机构,如图5所示,其中图5a机构中R11‖R13‖R21‖R23;P12⊥R11;P22⊥R21;R14与R24轴线共线且基点取在轴线上,该机构由4条简单支链构成[10]。第4方案(图5b)实为第3方案的变形,将R13与R23移除,同时将R14与R24在同样位置上替换为2个C副,该机构由FAN等[20]提出,该文使用运动副替代的思想提出了类似的一系列包含C副、U副的简单支链构成的2T2R机构。
图5 SOC-(2)的一种(2T-2R) PM及其变形Fig.5 (2T-2R) PM structure composed by SOC-(2) and its metamorphosis
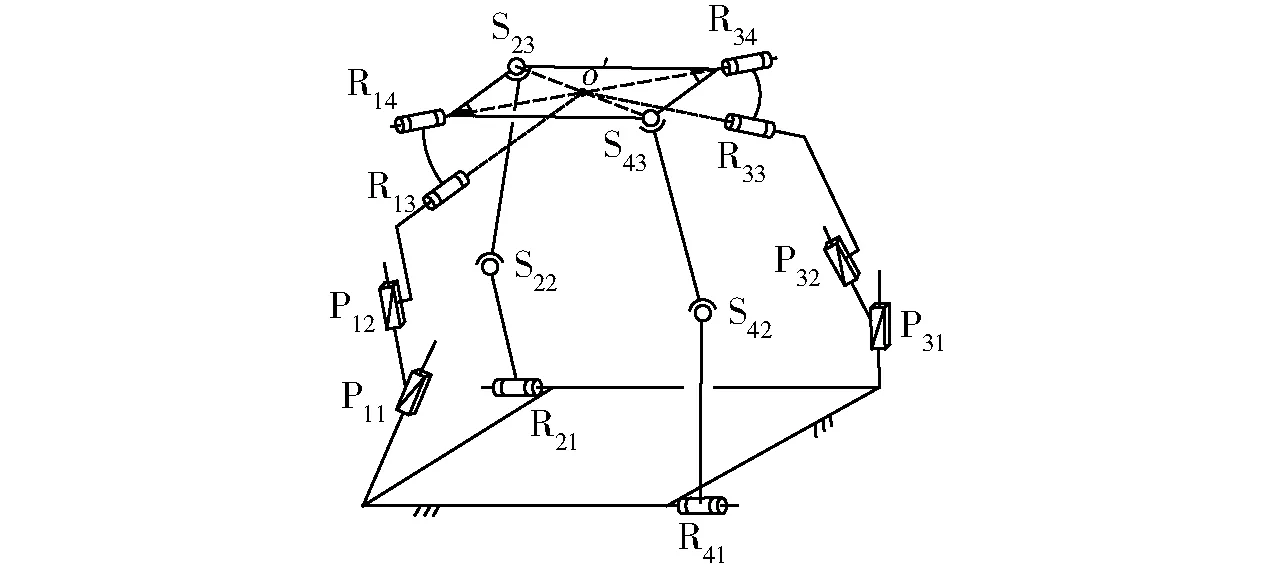
图6 SOC-(3)的一种(2T-2R) PMFig.6 (2T-2R) PM structure composed by SOC-(3)
(2)按表4中第5组合方案综合出的并联机构,如图6所示,其中,P12与P12共面且垂直于R13;P31与P32共面且垂直于R33;R14与R34共线且基点为4个R副轴线交点。该机构由KUMAR等[16]提出,其4条支路都为简单支链,结构较为简单。
(3)按表4中第6、7组合方案综合出的并联机构,如图7所示,其中图7a机构中R11‖R12‖R21‖R22‖R31‖R32‖R41‖R42;R13‖R23‖R33‖R43;R13与R23轴线共线且基点取在轴线上。图7b机构将图7a机构的第3、4条支链替换为SSR结构,且定平台4个R副平行。
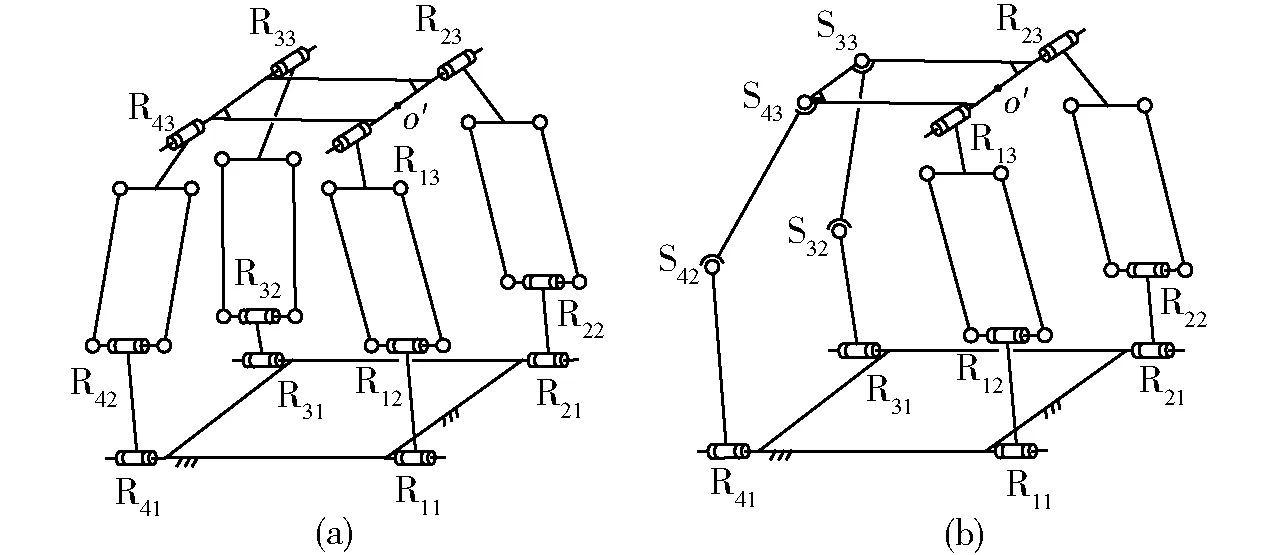
图7 HSOC-(1)的两种(2T-2R) PMFig.7 Two types of (2T-2R) PM structure composed by HSOC-(1)
(4)按表4中第8、9组合方案综合出的并联机构,如图8所示,其中,图8a定平台上4个R副平行,动平台上4个R副也平行,基点位于动平台两R副共线轴线上。图8b将图8a机构的第3、4条支链替换为SSR结构,且定平台4个R副平行。

图8 HSOC-(2)的两种(2T-2R) PMFig.8 Two types of (2T-2R) PM structure composed by HSOC-(2)
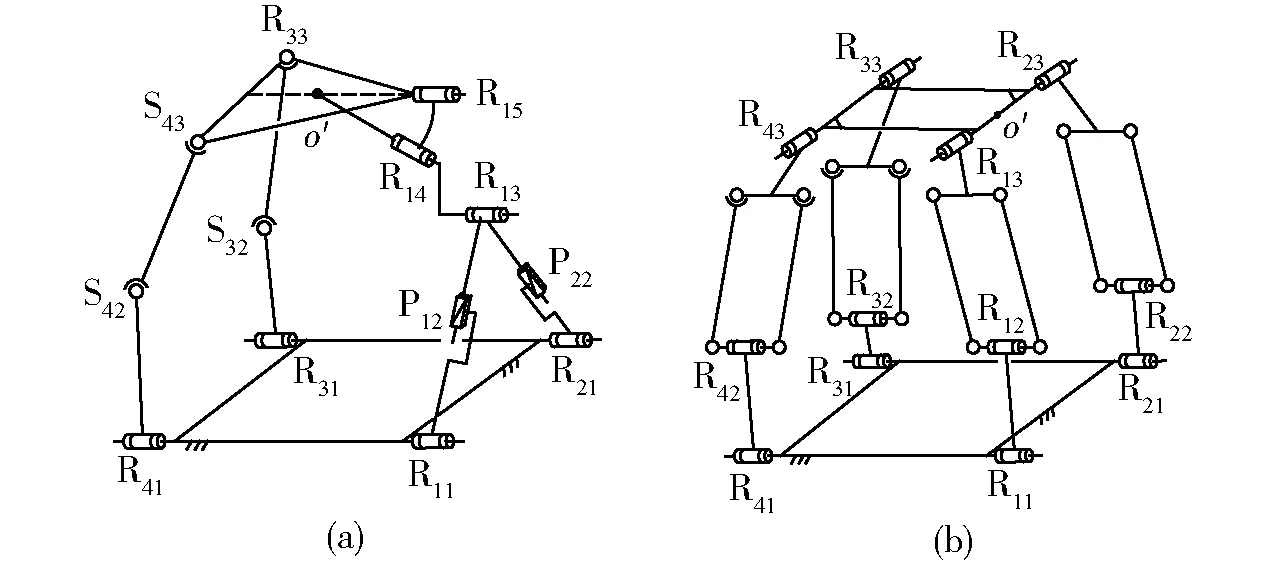
图9 HSOC-(3)及HSOC-(5)的 (2T-2R) PMFig.9 (2T-2R) PM structure composed by HSOC-(3) and HSOC-(5)
(5)按表4中第10、11组合方案综合出的并联机构,如图9所示,其中图9a机构中R11‖R21‖R13‖R31‖R41;P12⊥R11;P22⊥R21;基点位于R14与R15轴线的交点。图9b机构中R11‖R12‖R21‖R22‖R31‖R32‖R41‖R42;R13‖R23‖R33‖R43;R13与R23轴线共线且基点取在轴线上。
(6)按表4中第12、13组合方案综合出的并联机构,如图10所示,其中,图10a定平台上4个R副平行,动平台上4个R副也平行,基点位于动平台两R副共线轴线上。图10b中R11‖R12‖R22;R13⊥R11;R13与R23轴线共线且基点取在轴线上。
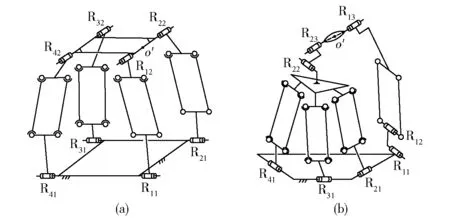
图10 HSOC-(6)及HSOC-(7)的(2T-2R) PMFig.10 (2T-2R) PM structure composed by HSOC-(6) and HSOC-(7)
(7)按表4中第14组合方案综合出的并联机构,如图11所示,其中R11‖R12‖R13‖R21‖R22‖R23‖R32;R14‖R24‖R33;R14与R24轴线共线且基点取在轴线上。它由WANG等[21]提出,该机构具有较强的转动能力。
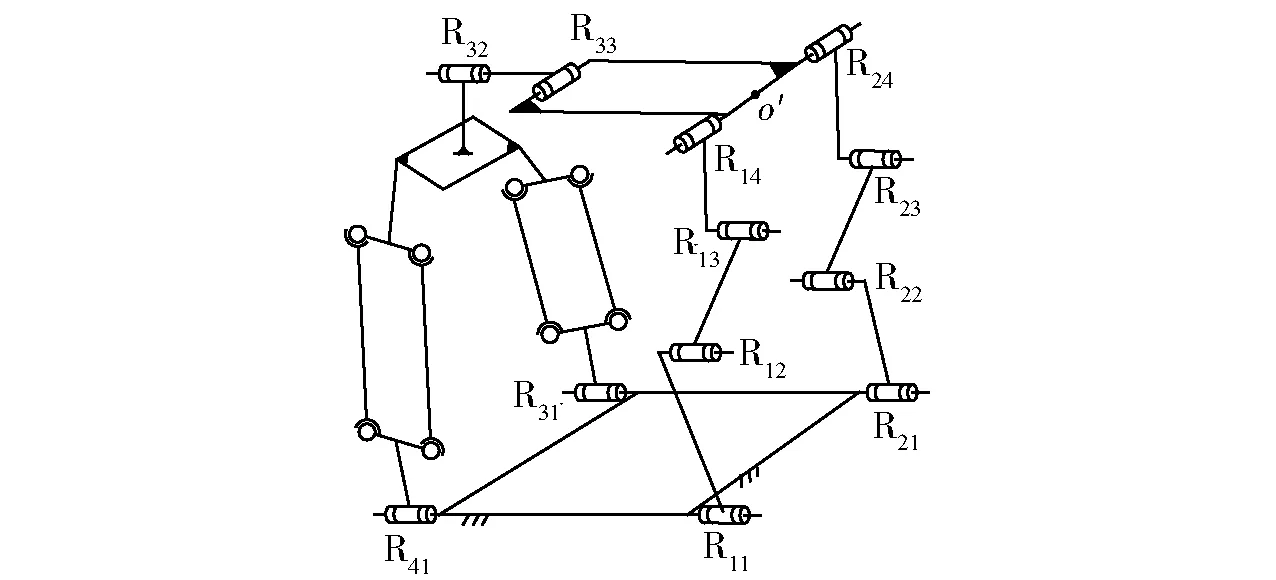
图11 HSOC-(8)的 (2T-2R) PMFig.11 (2T-2R) PM structure composed by HSOC-(8)
(8)按表4中第15组合方案综合出的并联机构,如图12所示,其中R11‖R13‖R21‖R31‖R32‖R41‖R42;P12⊥R11;P22⊥R21;R14、R15、R33、R34、R43、R44的轴线交于一点且为基点。
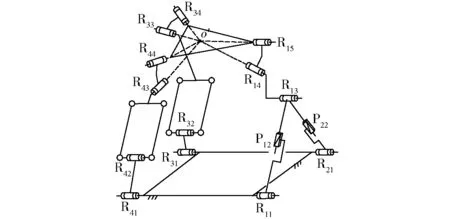
图12 HSOC-(9)的 (2T-2R) PMFig.12 (2T-2R) PM structure composed by HSOC-(9)
2.5 选定机构驱动副
对于自由度为F的机构,在判定其驱动副时[10],可将预定的F个运动副锁死,此时得到的新机构的自由度若为0,则该F个运动副可同时为机构的驱动副,否则,该F个运动副不能同时为机构的驱动副。
以图4a为例,判定该机构定平台上的4个R副是否可为驱动副。
(1)确定支路拓扑结构
将定平台的4个R副(R11,R21,R31,R41)锁死,得到新的并联机构,其支路拓扑结构为
SOC{-Rj2‖Rj3-Rj4-} (j=1,2,3,4)
(2)确定支路的POC集
由式(1)可得,当基点取在末端R副轴线上时,该支路的POC集为
基点取在周线外位置时,该支路的POC集为
(3)确定新机构的自由度
将各支路末端POC集代入式(4),并由式(1)、(2)可得

将ξLj代入式(4),得到新机构自由度为
(4)由于新机构的自由度为0,可得定平台上4个R副(R11、R21、R31、R41)可为4个驱动副,即满足设计要求。
类似地,可用同样方法,判定图4~12所示并联机构的驱动副,都为定平台上4个R副,也都满足设计要求。
以上为本文综合出的15种2T2R机构,详见表5,其中带*的机构为本文首次提出的新机构。
3 2T2R并联机构的拓扑结构分类
3.1 拓扑结构分类
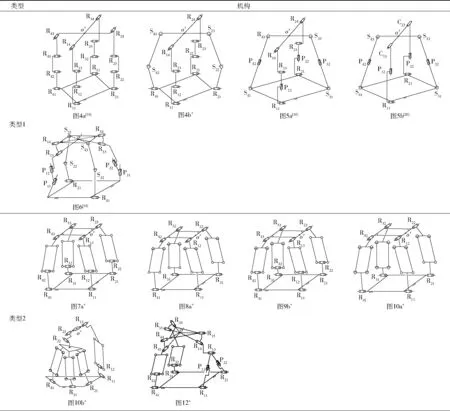
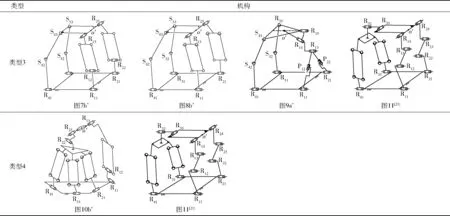
综上所述,现依据支路结构和动平台数目,对综合出的15种2T2R机构(其中10种为新型的2T2R机构)进行如下机构类型分类,详见表5。
其中①皆由简单支路构成的机构(类型1)有5种:即表4中序号1~5。②皆由复杂支路构成的机构(类型2)有6种:即表4中序号6、8、11、12、13、15。③由简单支路复杂支路共同构成的机构(类型3)有4种:即表4中序号7、9、10、14。④单动平台的机构有13种:即表4中序号1~12及序号15;双动平台的机构(类型4)有2种:即表4中序号13、14。
表5(2T-2R)PM的4种类型
Tab.5Fourtypesof(2T-2R)PM
续表5
3.2 拓扑特征分析
为优选具有实用价值的机构,根据文献[10]中提出的拓扑特征计算方法,对表5中的15种2T2R机构进行拓扑特征分析,得到其所包含的基本运动链(BKC)、耦合度(κ)、自由度类型和运动解耦性,详见表6。
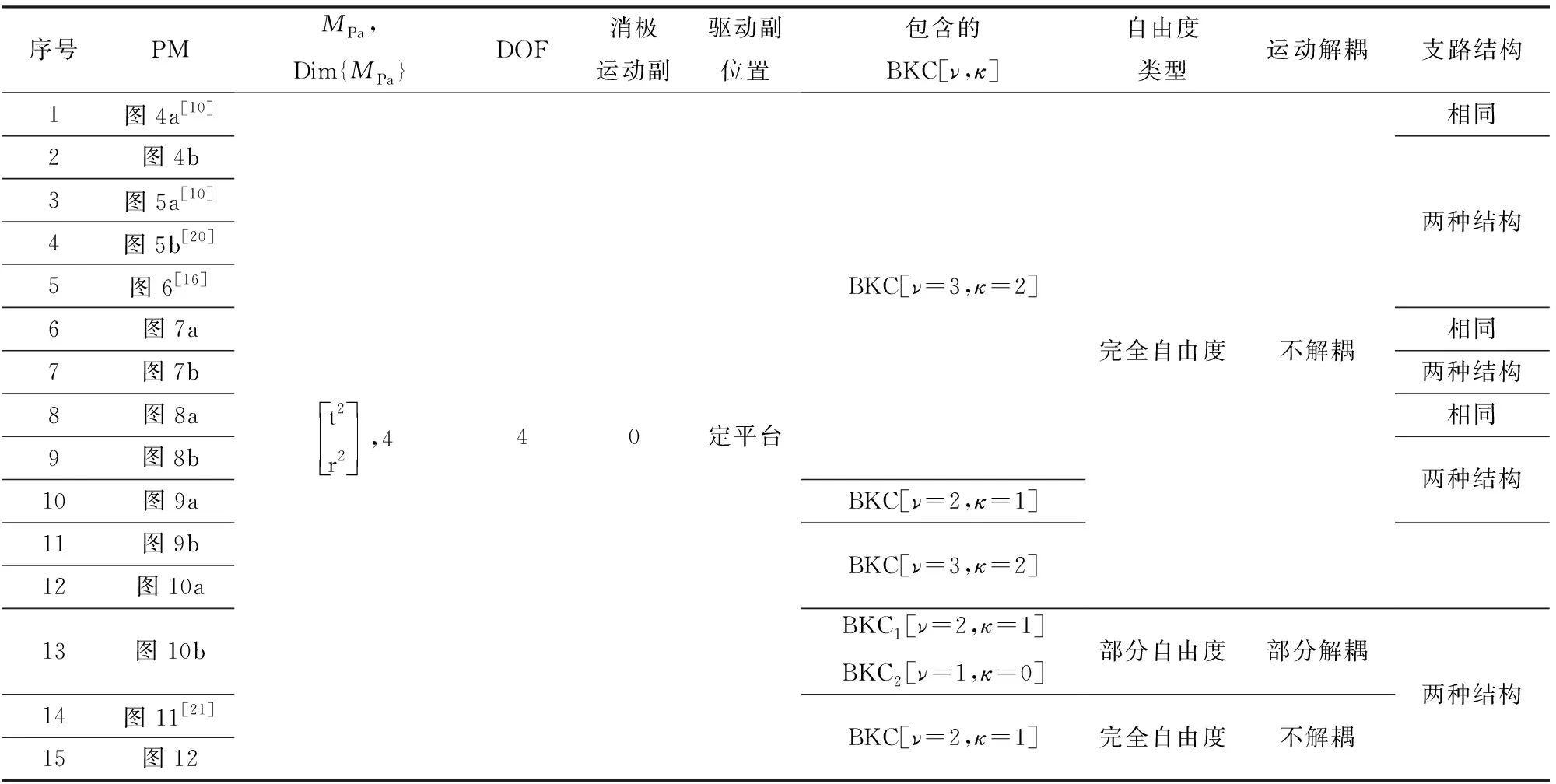
表6 (2T-2R) PMs的拓扑特征Tab.6 Topology structure characteristics of (2T-2R)PM
(1)耦合度是衡量机构复杂程度的一种拓扑不变量,对于耦合度为1的机构,一般可用一维搜索法得到位置问题的全部实数解。表6中,耦合度为1的机构为序号10、14、15,其中,序号10与序号15为本文设计的新机构,而本文参考文献中列举的,为已有的其他构型(序号1、3、4、5),它们的耦合度为2,其机构较为复杂。本文所提新机构与之相比,优点为:耦合度仅为1,机构结构较为简单,较易处理运动学与动力学问题。
(2)运动输入-输出解耦可使机构运动学分析较为简单,又能简化机器人的控制问题,因此,实现运动输入-输出解耦是机构拓扑结构设计的重要目标之一。表6中,部分解耦且具有部分自由度的机构为序号13,该机构为本文设计的新机构,其包含两个BKC,且耦合度分别为1和0,而本文参考文献中列举的,已有的其他构型(序号1、3、4、5、14),它们仅包含一个BKC,具有完全自由度,且不解耦。
4 结论
(1)基于拓扑等效替代的复杂支路型综合方法,提出了5种HSOC新构型支链。
(2)基于POC方程的并联机构结构综合方法,结合综合出的新型HSOC支链结构,给出了15种2T2R并联机构构型,其中,5种是已有机器人构型,其余10种是具有实用价值的新构型。
(3)依据拓扑结构特性,对综合出的2T2R机构进行分类,其中,皆由简单支路构成的机构5种,皆由复杂支路构成的机构6种,由简单支路、复杂支路共同构成的机构4种;单动平台的机构13种 ,双动平台的机构2种。进一步对综合出的15种机构进行拓扑特征分析,计算其耦合度、自由度类型和运动解耦性,筛选出结构较简单、耦合度为1的机构以及较易于控制的部分解耦机构。
