低成本集群自主协同与控制问题研究
2018-12-04陆浩然陈海鹏
李 强, 陆浩然, 陈海鹏
(北京宇航系统工程研究所,北京 100076)
0 引言
2015年CSBA(Center for Strategic and Budgetary Assessments)发布的《维持美国精确打击优势》报告中,提出了依托平台集群技术的分布式作战思想[1],即使用大量廉价弹药、小型无人机或诱饵,采用蜂群式、协同配合作战方式,迫使敌方消耗最具价值的防空能力来应付廉价、可消耗的武器,从而抵消敌防御相对优势,洞穿其防空系统,为后续的武器装备打击打开一个通道。当前,美国着力发展无人机蜂群作战技术以借此抵消中、俄等国的相对防御优势,这类组织有序、价格低廉、协同配合的无人机被认为是美国未来作战愿景的重要组成部分。
本文首先介绍了国外集群协同控制的研究现状,结合DoDAF(Department of Defense Architecture Framework)体系提出了低成本集群架构的设计,采用成熟货架产品支持的技术搭建了低成本集群,并针对集群协同与控制性能参数进行了因子实验,最后分析了未来作战中集群打击的应用模式。
1 国外集群协同控制方法介绍
集群由各类机动单元组成,例如履带车、多轮车、无人机等具备不同能力的飞行器或车辆[2]。低成本实现是集群作战(如图1所示)的关键,相对于传统作战模式,它可以完成不返回式的高风险任务,同时灵巧多变的设计可以满足前线部队的多种需求。

图1 集群作战示意图Fig.1 Schematic diagram of swarm attacking
2014年美国DARPA(Defense Advanced Research Projects Agency)启动了集群挑战项目,旨在促进采用价格低廉、技术成熟度高的系统集成方式实现具备分布式冗余性的集群系统[3]。目前,除了DARPA外,美国海军、空军都开展了低成本无人集群系统的研究。低成本的集群协同与控制主要方法如下:
(1)蜂群
蜂群机动是集群协同工作中的常用行为,蜂群机动多用于旋翼飞行器,控制算法相对简单,目前已较为成熟,通过开源的地面控制站就可以完成蜂群机动的操作[4]。常用的软件有Mission Planner、APM Planner和QGroundControl。软件支持多架次飞行器的自主连接,将其中一架设置为领航器,其余飞行器根据与领航器间的偏置量自动协同机动。
(2)鸟群
相对于蜂群机动,鸟群机动中无法实现悬停,多用于固定翼飞行器集群。鸟群机动更适用于未来的集群作战模式,算法与蜂群机动相比也更为复杂,其仿真如图2所示。鸟群机动中最常见的是Boid算法[5],应用的3条原则为:分离、排列、聚合。机动过程中必须避免飞行器间的碰撞,排列朝向集群机动的方向,同时围绕中心保持一个聚合的整体。
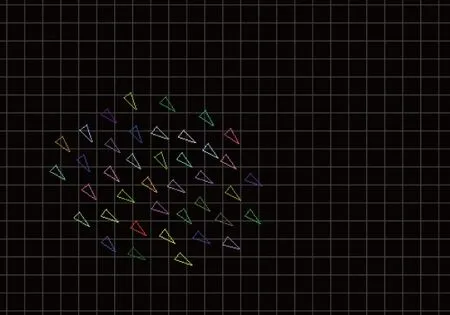
图2 鸟群机动算法仿真Fig.2 Simulation of bird swarm maneuver algorithm
高效的鸟群机动阵型可以提高集群的作战性能,基于Reynold[6]模型,美国空军技术研究院设计了可以减少燃油消耗的机动阵型。在碰撞率与空气阻力间进行了优化,实现了集群中飞行器的精确定位,机动过程中在飞行器间设置了缓冲区域,集群成员间通过速度与位置信息的交换保持队形完成半自主的协同飞行。
(3)中继
为了克服通信范围的限制,美国空军技术研究院提出了采用单独的中继飞行器与集群配合的方案,由中继飞行器完成地面控制站与集群间的信息通信,使用移动目标搜索算法可以使机动范围扩大110%。
(4)监视
监视机动是目前集群协同与控制研究的另一个热点,在空中以一定的队列对地面目标分别进行图像采集,可以协作完成监视任务。Boire等[7]提出的算法可以使集群飞行器按照相同的角度在同一条路径中持续巡飞,并确保目标一直维持在视场内,研究了风速、集群数量对监视效果的影响。
2 低成本集群方案设计
2.1 低成本集群系统组成
集群系统由地面无人车辆、无人机和地面控制站组成,其中每个集群单元自成一套系统,包含自主飞控、通信、电池、推进等功能。
低成本是集群系统的首要特点,而选用成熟货架产品可以在实现低成本的同时保证系统的可靠性。目前商用无人机发展迅速,为搭建集群系统提供了许多可供选择的产品。
(1)飞控系统
自主飞控系统是飞行器的“大脑”,负责执行控制指令,控制无人机的各个模块,实现自主控制。随着无人机控制技术的成熟,出现了许多实现飞控功能的商业产品,例如Pixhawk、ArduPilopMega等。借助货架式成熟产品可以实现定点飞行、环形盘旋等自主化的飞行方式。
(2)遥测系统
遥测系统负责实现地面控制站与飞行器间的通信,遥测数据将集群单元的信息以无线的方式传输至控制站。同样,商业化的遥测产品已经较为成熟,915MHz 3DR无线电可以在两个相同节点号的终端实现数据交互,最大延迟时间为33ms。
(3)无人机
选用成熟开源的四旋翼无人机作为低成本研究的集群单元,包括GPS导航仪、速度控制器、电池、电机以及遥测模块,均选用低成本货架产品。相对固定翼无人机,四旋翼飞行器拥有更好的机动性与稳定性,且对空间的要求较低,适合开展相关的协同与控制研究。
(4)地面控制站
飞行过程中地面控制站实现操作者与集群间的交互,同时提供战场态势显示的功能。Mission Planner与Droid Planner是众多商业平台中更适用于集群操作的,开源代码为后续开发提供了接口。目前支持的操作包括:规划路径巡飞、定点绕飞、跟踪等,使用者可以使用平板电脑在Google地图上直接对飞行器进行规划操作。
2.2 集群体系架构设计
集群体系由导航卫星、地面控制站、无人机、通信系统、导航接收、驾驶仪等多类系统组成。设计体系架构时,使用DoDAF中SV-1与SV-4分别对体系架构进行描述,给出系统的组成、接口以及功能,如图3所示。

图3 低成本集群SV-1视图Fig.3 SV-1 view of low cost swarm
集群采用领航协同模式,体系中包含一个地面控制站、领航无人机和跟航无人机,每个无人机上安装GPS定位接收机,接收卫星信号并将位置信息发送给自主驾驶仪。无人机与地面站间通过915MHz遥测设备进行通信,通过地面平台中的飞行应用程序实现无人机间的协同。飞行开始时操作者以手动模式控制领航飞机,当启动协同飞行模式后,由自主驾驶仪接管飞行控制,操作者只需在地面控制平台中设置航迹点、间距、控制方法以及协同模式,终端显示通过互联网加载地图信息,为操作者提供规划界面。
SV-4中给出了SV-1中所有节点的分级功能描述,包括无人机节点、地面控制站节点以及协同任务规划节点。无人机节点完成导航和通信功能,导航功能获取自身位置,更新巡航点,给定绕飞中心;通信功能完成GPS信号、飞行指令的接收,发送遥测数据,记录飞行数据。地面控制站可以完成蜂群飞行、定点巡飞、参数设置以及飞行日志的功能,蜂群飞行功能将集群中的跟飞无人机与领航无人机连接,设置它们与领航无人机间的相对位置即可实现集群飞行;定点巡飞通过Google地图对巡飞路径进行设置、修改和查看;参数设置对绕飞半径、巡航速度、遥测速率等参数进行设置;飞行日志记录无人机飞行过程中的导航信息,并提供事后回放的功能。
图4给出了集群协同任务规划功能视图。领航无人机获取经纬度、方向和高度等导航信息,将其发送至跟航无人机,并设置中断周期;任务加载功能为无人机分配IP地址,将任务脚本中的对象与通信接口绑定,实现协同任务的分配;跟航无人机每个中断周期内接收领航无人机的导航信息,并计算位置偏差,根据计算结果进行跟航飞行,导航位置更新后重新计算跟航目标。协同任务执行期间各无人机和地面站将按照中断周期执行,直至切换至手动控制模式。
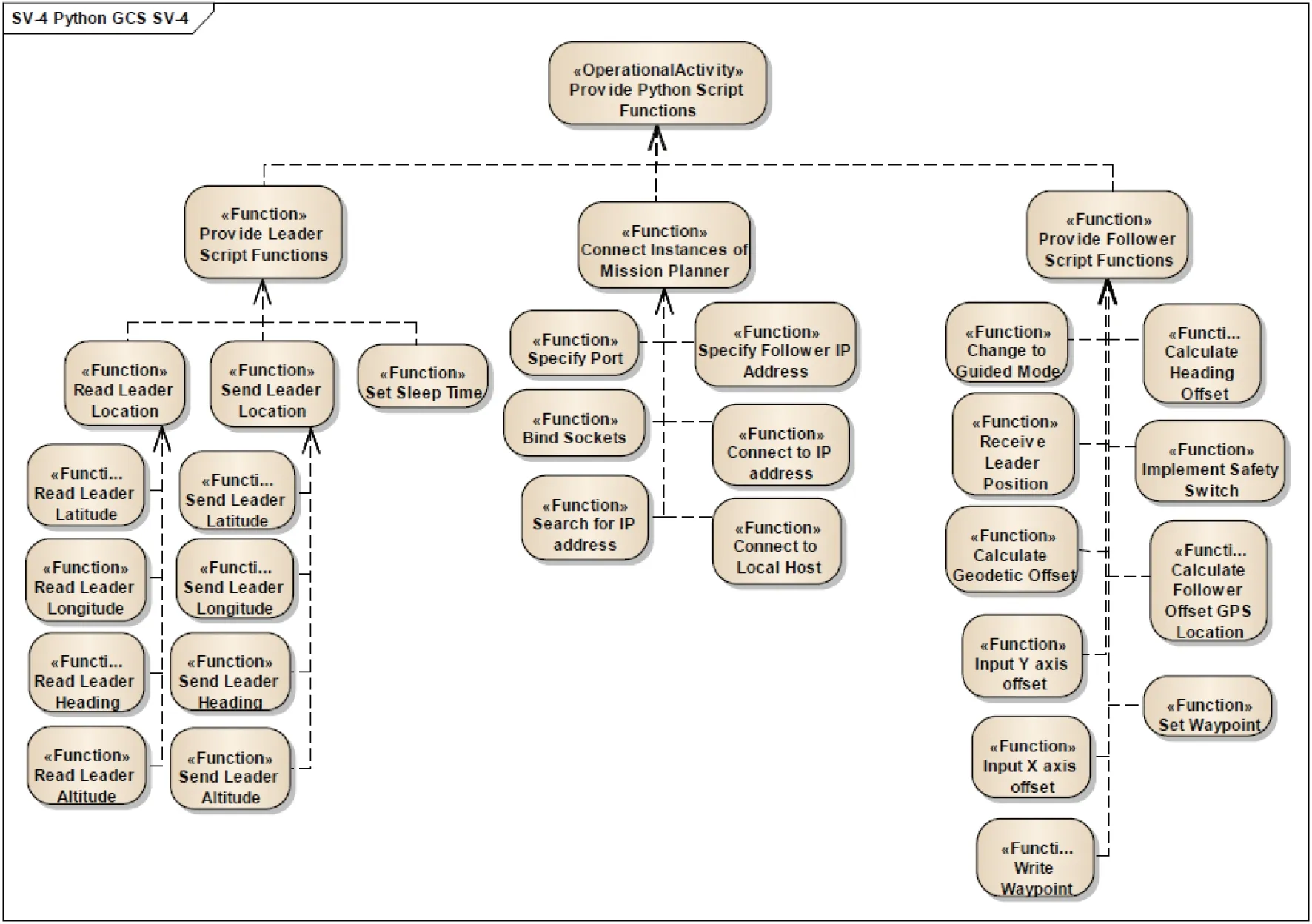
图4 低成本集群SV-4视图Fig.4 SV-4 view of low cost swarm
3 低成本集群协同与控制的因子实验
采用成熟货架产品搭建的低成本集群基本可以实现常规的协同飞行任务功能,但整体的性能(如系统参数如何优化)需要通过仿真与试验设计进一步分析。根据商业软件提供的集群协同与控制模式建立基本任务模型,选择不同的系统参数,例如中断时间、遥测速率、航路半径、巡航速度、指令周期等(见表1),进行5因子2水平的全因子实验,分析各参数对指令延迟和定位精度的影响程度。选择不同水平的因子组成算例进行仿真,通过Minitab开展了实验设计并对仿真结果进行了统计分析。

表1 系统参数及范围
3.1 指令延迟
指令延迟Ty定义为领航无人机起飞时间T0
与跟航无人机动作时间T1的差值,取仿真中领航机起飞至跟航机开始动作间的时间,即Ty=T0-T1。
图5给出了根据仿真结果统计输出的立方图,可以发现,当所有因子取-1水平时指令延迟的时间最小。各参数由小变大的过程中,中断周期变化引起的指令延迟变化最大,指令周期的影响其次。最优延迟下,中断时间500ms、遥测速率3Hz、航路半径0.25m、巡航速度1m/s、指令周期33ms,延迟时间为0.22s。

图5 指令延迟性能的立方图Fig.5 Cubic diagram of instruction delay performance
3.2 定位精度
定位精度Ed指真实定位与理论定位间的偏差,仿真中取稳定飞行段领航无人机与跟航无人机间距离Dd与设定距离Dset的差值,即Ed=Dd-Dset。
根据图6的立方图结果,定位精度受巡航速度变化的影响最大,尤其是在路航半径较大时,当中断时间为5000ms、遥测速率3Hz、航路半径5m、巡航速度1m/s、指令周期33ms时,定位精度最高,可以达到3.02m。根据统计结果,商用集群算法中巡航速度越快定位精度越高,较低速度时无法实现一定的定位精度,将无法实现紧密的编队飞行。

图6 定位精度性能的立方图Fig.6 Cubic diagram of positioning accuracy performance
4 集群打击应用模式分析
根据对低成本集群系统的建模与仿真结果,对未来可能的应用模式进行分析,探讨低成本集群技术在紧密编队飞行、信息共享以及目标追踪中应用的可行性。
4.1 紧密编队飞行
通过集群协同与控制算法,使得紧密编队飞行成为可能。精确的飞行定位对瞬态响应的延迟时间有着严格要求,紧密编队飞行中任意一个节点的响应延迟超差都有可能导致整个集群出现碰撞。根据仿真结果,紧密飞行中系统响应至少需要10Hz[8];而根据低成本货架产品搭建的系统响应延迟时间至少也要0.2s,过大的响应延迟在任何形式的紧密飞行都存在一定风险。只有减少延迟,建立飞行器间的直接通信及处理通路,才有可能实现低成本的紧密编队飞行。
4.2 信息共享
虽然低成本集群的响应延迟较大,但在需要信息共享的任务中,延迟并不会影响主任务的执行。当集群中的一个单元发现攻击目标时,低成本集群中所建立的通信链路也可以实现将目标信息在集群单元、集群与地面控制站之间的共享,通过协同控制完成对目标的搜索与打击。
4.3 目标追踪
目标追踪是军事任务中常用的功能之一,单一飞行器进行目标追踪时,相机故障与目标遮挡等问题对追踪效果产生了直接影响。通过集群飞行器执行目标追踪任务将大大提高追踪成功率,为精确打击提供重要的目标信息。建立无人机监视视场模型,图7为无人机监视视场模型侧向示意图,θel代表相机俯仰角度,选用30°视场角、1024×768像素的高清相机,高度为100m时,按照0.16m最低像素要求[7],可计算相机倾角的θel为30.12°,视场轴向范围为179.1m。

图7 无人机监视视场模型侧向示意图Fig.7 Lateral view of UAV surveillance field model
图8为双机监视视场模型俯视示意图。假设地面车辆的速度为6m/s,采用两架无人机并排构成监视视场,被监视车辆起始位置在视场的中心,计算目标纵向逃离时间为14.92s,横向逃离时间为18.14s,根据低成本集群中指令延迟的最长时间13.13s,定位精度最大偏差为7.8m,逃离时间均大于延迟,可以完成目标追踪任务。

图8 双机监视视场模型俯视示意图Fig.8 Top View of dual-camera surveillance field
5 结论
无人集群系统被美军视为改变未来战争游戏规则的颠覆性技术,在国防预算受限的背景下,无法通过高端装备大规模地更新换代,而通过集群实现更低成本、更高效能的潜力,可以实现美国在第三次抵消战略中期望的突破。
本文基于成熟货架产品,开展了低成本集群系统的设计与搭建,对系统性能及关键参数进行了仿真设计与结果统计,并分析了低成本集群在军事任务中的应用模式,探讨了基于低成本实现集群打击任务的可行性。根据仿真结果,由于低成本集群中延迟时间过大,无法满足紧密编队飞行的要求,但其性能可以满足信息共享与目标追踪两项任务的要求,具备一定应用价值。后续研究中,可以搭建真实的无人机集群系统,开展飞行试验,进一步研究低成本集群系统的性能与应用模式。
