基于改进遗传算法的机器人时间最优轨迹规划
2018-12-03汪木兰朱晓春王保升
秦 律,汪木兰,朱晓春,王保升
(南京工程学院江苏省先进数控技术重点实验室,江苏 南京 211167)
随着智能制造的深入发展,具备焊接、码垛、搬运等功能的串联机器人因其结构简单、制造成本低廉、控制便捷等优点,被广泛应用于工业自动化生产线[1-2]。轨迹规划作为机器人运动控制的基础,对研究机器人的运行效率、作业精度和工作平稳性具有重要意义。为寻求轨迹最优解,可分别对能量、时间、冲击等机器人工作指标进行局部优化,或者综合考虑上述指标以获取全局最优[3]。
对机器人运行时间的最优化求解为当前的研究热点,其中较为成熟的时间优化算法有人工神经网络算法、遗传算法、粒子群算法和蚁群算法[4]。文献[5]提出了一种改进型免疫克隆优化方法,以拥挤距离确定克隆规模大小来保留最优解,采用亲和度较高的个体代替消亡个体,加速种群的收敛速度。文献[6]采用序列二次规划方法求解在非线性约束条件下的最短时间,在目标函数进行迭代时,以牛顿法得到的拉格朗日函数构成的Hessian矩阵来实现收敛,但该方法判断收敛的条件复杂,降低了寻优效率,并且不能保证局部轨迹的精度。文献[7]采用自适应遗传算法进行时间优化,通过调整后期变异概率,增加种群的多样性。但利用罚函数处理运动学约束时,不满足约束的个体所受惩罚量较大,易出现适应度值较大的特殊个体引导种群发展,导致寻优过程陷入局部最优并过早收敛。
本文在用三次样条函数对机器人轨迹进行插值的基础上,采用聚类方法改进的遗传算子对个体适应度值大小进行分类,制定不同选择方法,保留优良个体并兼顾种群多样性。以新的变异操作对后期的最优个体进行调整,提高搜索效率,求出机器人的最短工作时间。
1 三次样条插值规划
三次样条插值函数的剖分子区间均为三次多项式,通过给定边界条件对各型值点进行插值拟合。将其运用于机器人轨迹规划中,既保证了机器人关节位移和速度的连续性,又能防止关节角加速度的突变,使机器人运行平稳且避免震动。

(1)

(2)

(3)
对式(1)进行微分,求出相应时间段的关节角加加速度,即:
(4)
(5)
(6)
依此类推,将式(5)写成矩阵形式得:
(7)
式中:方程组的系数矩阵为三对角矩阵,由于|λi|+|μi|=1,则|λi|+|μi|,|λi|,|μi|三者均小于主对角元素2,所以系数矩阵为严格对角占优矩阵。通过追赶法求得Sj,1,Sj,2,…,Sj,n的数值,代入式(3),得到完整的关节角位移表达式。
2 多目标优化函数
通过三次样条函数,使机器人能对关节的角位移、角速度与角加速度进行实时控制。考虑到提高机器人的运行效率,还需要对各关节的运行时间进行优化,使机器人能够高效地完成工作任务。
将机器人运动的整段轨迹曲线按选取的型值点进行剖分,通过对各分段轨迹的时间优化来达到总时间的最优,即:
(8)
式中:Tmin为机器人完成整段轨迹曲线所需最短时间。机器人关节在进行轨迹规划运动时还会受速度、加速度、加加速度的约束,即:
(9)

3 时间最优轨迹规划
遗传算法是在进化论和自然遗传机制上衍生的搜索方法,相对于传统优化算法,具有全局性、并行性、灵活性等特点。本文利用基于聚类方法的遗传算法[8-9],对进行三次样条插值后的关节轨迹进行时间优化,在保证种群多样性的同时,加强了局部搜索能力。其具体算法流程如图1所示。
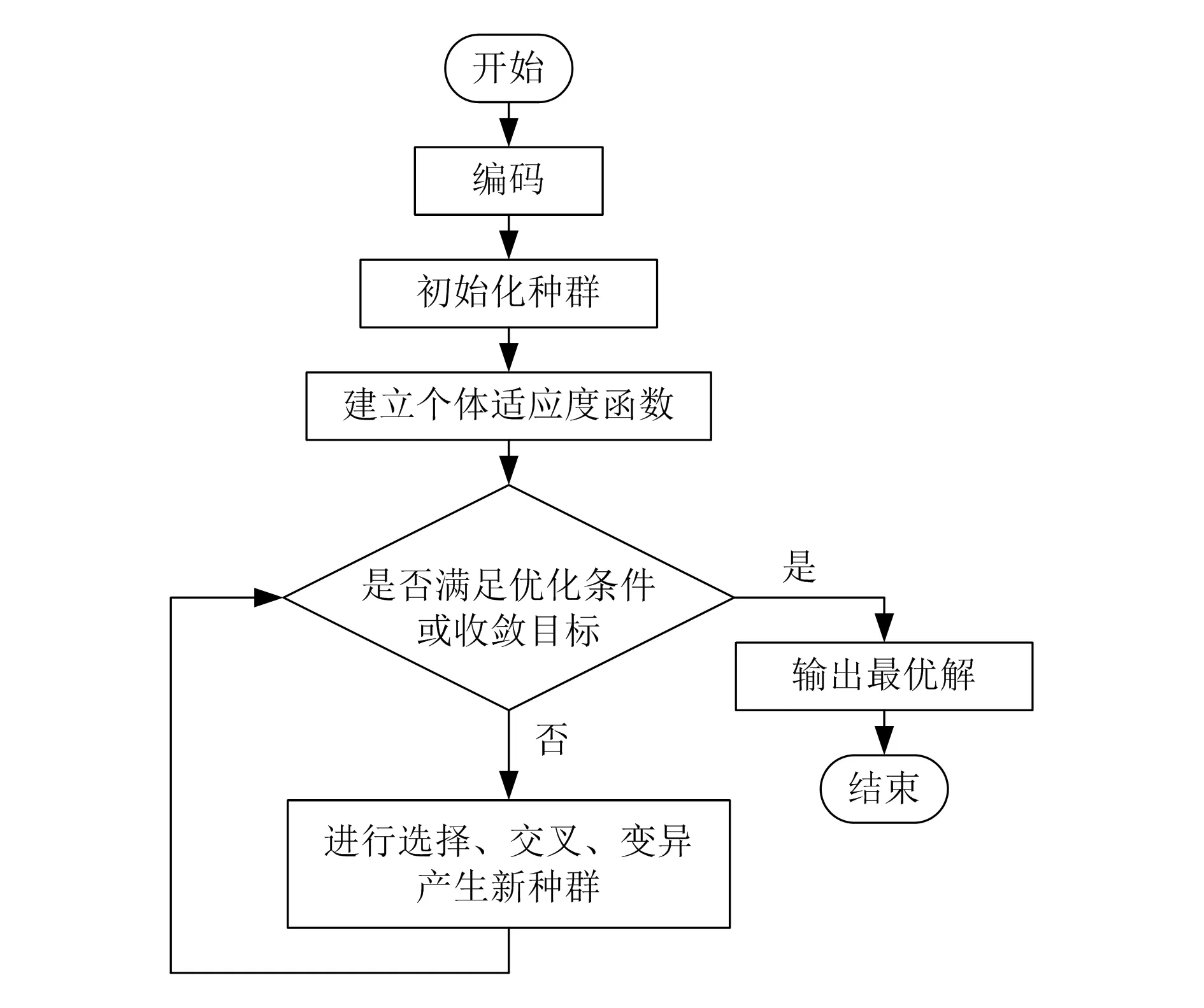
图1 基于聚类方法的遗传算法流程图
1)编码。
对各分段轨迹曲线的运动时间进行二进制编码,设定编码长度,使可行解的精度为0.001。该操作简单易行,使交叉、变异等遗传操作便于实现。
2)种群初始化。
在满足约束条件的情况下,对种群进行初始化,在hi的值域内,随机生成多个新个体,并设置种群的规模为m。为保持种群的多样性,并方便后续的适应度值分类,m选取20~100之间的奇数。
3)适应度函数建立与标定。
用外罚函数法处理式(9)中的不等式约束条件,通过对不满足约束条件的个体施加惩罚项,并随着种群的发展,增大惩罚量,迫使迭代点逐步向可行域靠近。其表达式如下:
(10)
(11)

(12)
当算法逐渐收敛时,由于群体中个体的适应度值比较接近,造成寻优停留在最优解附近,为提高选择能力,此时应增大个体适应度值。因此针对式(11)的适应度函数进行重新标定,即:
(13)
式中:F(t)为标定后的适应度值;Fit(t)min为原适应度函数值的下界;Fit(t)max为原适应度函数值的上界;δ为开区间(0,1)内的一个正实数。
4)选择与交叉。

(14)


5)变异。
在寻优过程进入后期时,由于采用的标准遗传算法其变异概率保持不变,使得算法在后期迭代时停滞不前,降低了收敛速度。为加强局部搜索能力,在后期引入新的变异算子。具体定义如下:


4 仿真实验
4.1 构建机器人模型
首先对PUMA560机器人进行运动学分析,采用D-H法建模,构建机器人各关节坐标系,并求出对应参数,即关节角θi、相邻两关节轴扭角αi-1、连杆长度ai-1、相邻两连杆间偏置di,再将参数导出,具体见表1。
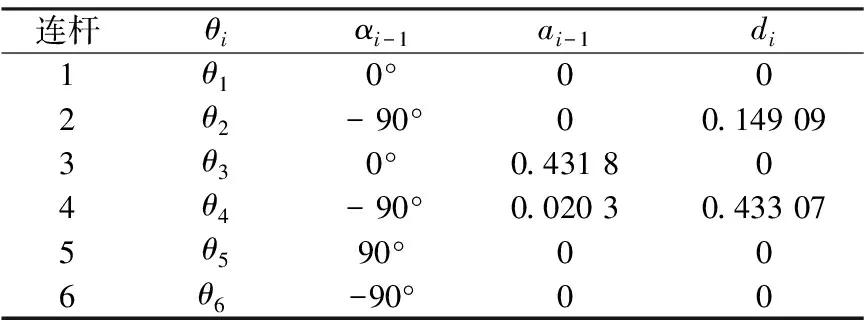
表1 PUMA560的D-H参数表
在MATLAB的Robotics Toolbox中创建PUMA560机器人,将D-H参数表中各数值导入Link函数LINK([alpha A theta D sigma offset],‘Standard’)中来定义连杆属性,再用SerialLink函数SerialLink([L1,L2,L3,L4,L5,L6])定义6个关节属性,建立的机器人模型如图2所示。
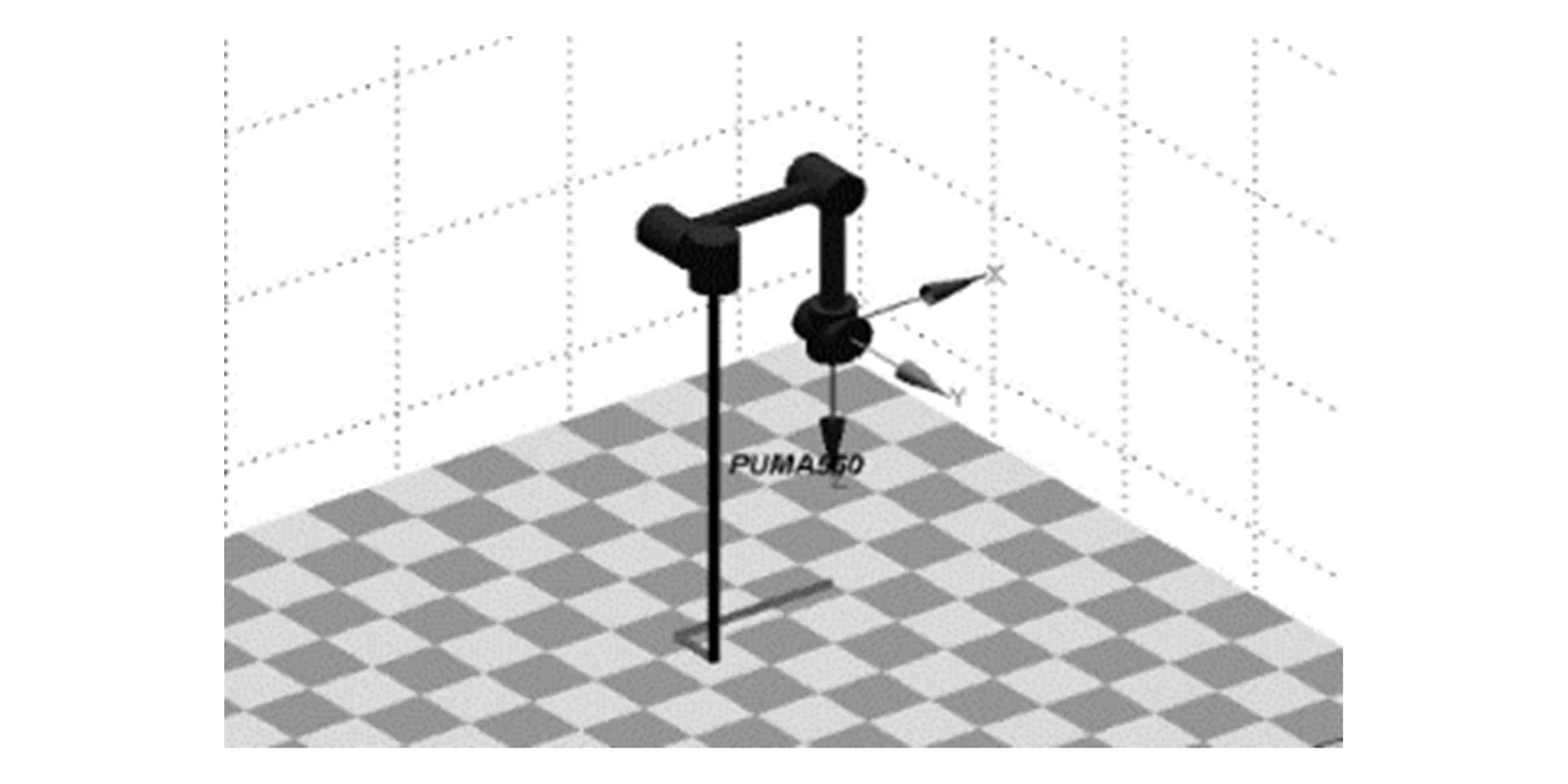
图2 PUMA560机器人模型
4.2 时间优化
本文引用文献[10]、[11]中的型值点参数和各关节运动学约束条件,其参数见表2和表3。对PUMA560的前3个关节(腰部、肩部、大臂)进行时间优化,对比上述文献中的结果,验证改进的遗传算法的可行性。
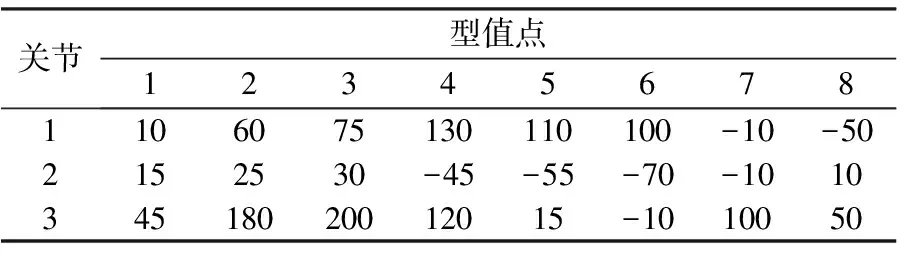
表2 型值点关节位置序列 (°)
总共选取8个型值点,并且3个关节运动轨迹的起点与终点角速度都为0。
表3 运动学约束条件
将型值点的关节位置序列代入改进后的遗传算法进行优化仿真,在满足关节的角速度、角加速度、角加加速度的约束条件下,求解的前3个关节的最优轨迹规划时间为[14.015,14.317,13.952]s,比文献[10]中的优化结果[20.680,20.772,19.920]s减少了[6.665,6.455,5.968]s,比文献[11]中的优化结果[16.018,16.444,17.416]s减少了[2.003,2.127,3.464]s,达到了对机器人轨迹规划运行时间优化的目的。将优化后的时间迭代图与文献[7]、[11]中的AGA(自适应遗算法)、SGA(标准遗传算法)的迭代图进行比较,其对比结果如图3所示。

图3 算法迭代收敛对比图
由图可知,采用SGA算法在第180代时开始收敛,采用AGA算法在第90代时开始收敛,而基于聚类方法的遗传算法在第75代时就开始收敛,收敛速度得到较大提升,说明该算法在后期的搜索效率得到提高,缩短了算法迭代收敛的时间。进行时间优化后的关节角位移、角速度、角加速度与角加加速度的曲线如图4所示。由图可知,优化后的角位移、角速度、角加速度的运行轨迹连续且光滑,同时满足表3中的运动学约束条件,完成了机器人时间最优轨迹规划的任务。
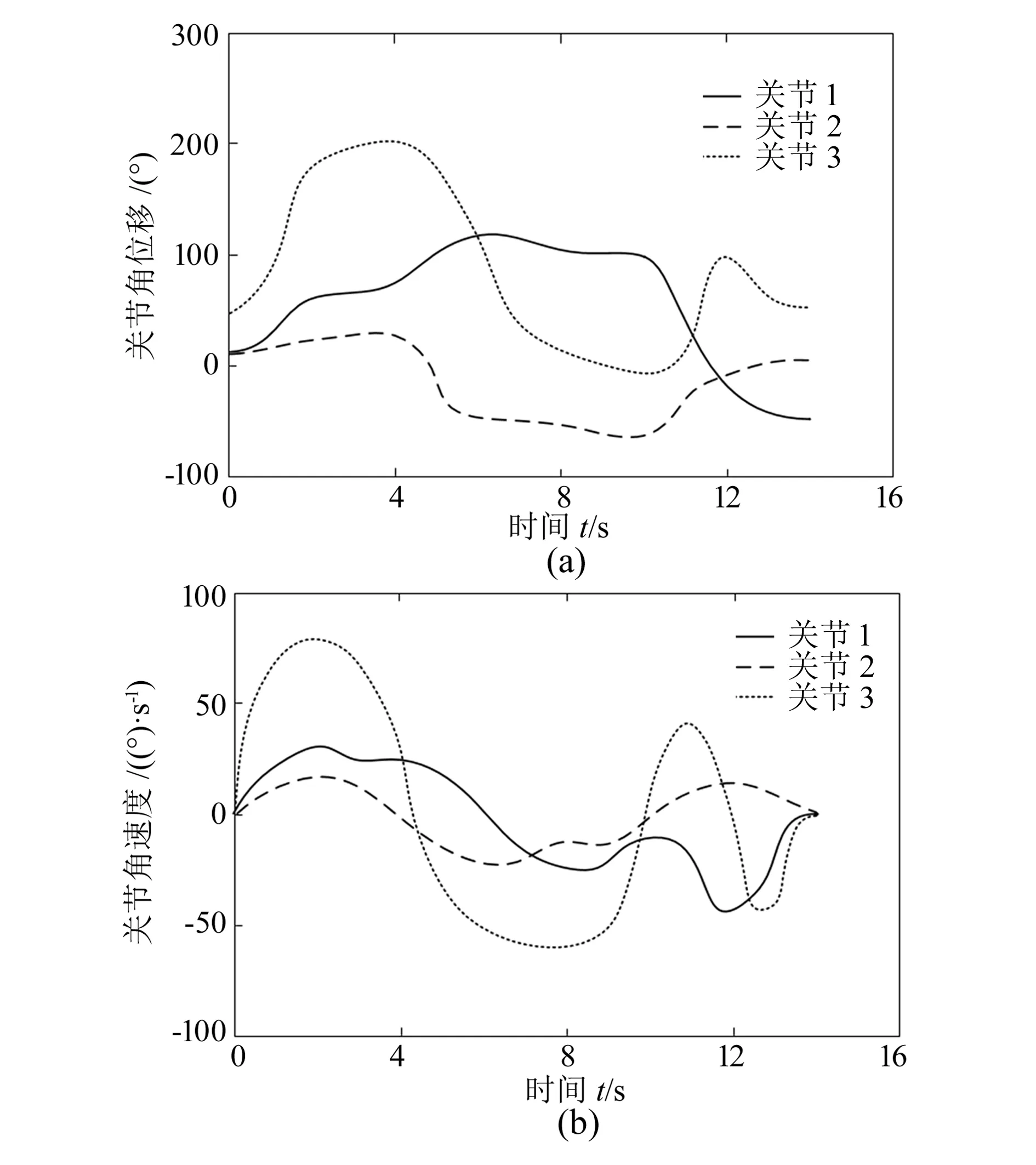

图4 关节时间最优轨迹曲线
5 结束语
本文利用三次样条函数拟合机器人运动轨迹,保证各关节角位移、角速度、角加速度的连续性。在满足运动学约束条件的情况下,利用基于聚类方法的遗传算法对插值时间进行优化。从对比实验的结果来看,该算法在后期的迭代收敛速度得到提升,机器人各关节的运行时间也明显缩短。在后期的研究中,将对能量、冲击等目标进行综合优化,以进一步提高机器人运行效率。
