基于地震分频调谐体和Wheeler转换技术的薄储层预测方法
2018-11-30朱剑兵郭加树李长红
殷 文 朱剑兵 李 援 郭加树 李长红
(①中国石油大学(北京)克拉玛依校区石油学院,新疆克拉玛依 834000; ②中国石化胜利油田有限公司物探研究院,山东东营 257022; ③山东省东营市人力资源和社会保障局信息中心,山东东营 257091;④中国石油大学(华东)计算机与通信工程学院,山东青岛 266580)
1 概况
中国陆相含油气盆地具有多物源、高频率的水进水退、水动能变化较大、多期次沉积体系等特点,因此砂、泥岩薄互层较为常见。如今,中国大部分盆地的显形构造圈闭已被发现,小断块、低幅度构造圈闭已难以满足勘探、开发的需要,岩性油气藏、隐蔽油气藏等复杂地质异常体已成为勘探、开发的主要目标[1]。
砂、泥岩薄互层的识别和预测,尤其是米级薄层含油砂体识别一直是地震勘探的热点和难点,传统的地震勘探技术难以有效描述薄层含油砂体。因此,利用地震资料识别薄储层以及提高薄储层预测精度是亟待解决的难题。
现今的大部分储层预测方法主要在深度域和时间域进行,由于受构造趋势影响,在层序划分、沉积相识别、沉积演化分析等方面存在较严重的多解性。以层序地层学和地震沉积学等理论为指导,构建地层对比和地层图的年代地层框架,利用Wheeler域转换技术将层序地层学和地震沉积学更好地结合[2,3],采用三维高精度地震资料分析层序地层和沉积期次,通过识别砂体展布和地层沉积演化过程减少多解性,便于认识和理解沉积组合间的空间关系(包括沉积、侵蚀和沉积时间等),最终在年代地层域中提取时间切片[4]。
常规地震调谐体分析是在全频段进行的,受地震主频的影响,高频信息被压制,弱化了地震资料高频分量的贡献。沉积过程具有周期循环的特点,其岩性、粒度成分、层理厚度也具有随方向变化的特征。这种薄层构造特征的方向性变化导致在地震响应中出现不同频率成分。根据地震波调谐原理可知,与有效频带内某一频率产生调谐效应的地层厚度在调谐体上存在对应的地震响应,其中较高频率的调谐效应对应薄层[5]。可见,如何提取分频段的调谐效应对薄储层预测至关重要。
解释、分析Wheeler域转换结果,有助于认识储层展布范围和方向、分析沉积迁移作用、分析沉积演化过程及研究目的层段的年代地层学。体系域剖面利用时频分析方法提取地震分频调谐体,有助于精确确定储层厚度。因此,将Wheeler域转换技术和地震调谐体技术有机结合,既能发挥地震数据的高纵向分辨率的优势,又能在Wheeler域发挥等时切片的横向分辨率的优势,突破常规的地震研究手段,实现多尺度的综合研究,有效降低储层解释的多解性,提高预测精度,实现薄储层识别(图1)。

图1 技术思路
2 地震分频调谐体提取
在地震勘探中,时频谱分解技术研究信号的频率随时间的变化规律[6]。Gabor提出的短时傅里叶变换是早期地震信号谱分解的有力工具,但其分析时窗固定,无法兼顾高频和低频信息。小波变换和广义S变换克服了短时傅里叶变换分析时窗固定的缺陷,具有多分辨率的能力,且计算效率高,如今已经广泛用于三维地震资料的频谱分析。但小波变换和广义S变换均采用“加窗”的思想,由于受“测不准准则”的制约,难以同时获得高时间分辨率和高频率分辨率[6,7]。
希尔伯特—黄变换彻底摆脱了线性和平稳性束缚,适用于分析非线性、非平稳地震信号,局部性好,自适应性强,具有良好的时频域刻画能力,能够精细刻画地震信号的时频能量分布,有助于提取地震分频调谐体,在处理复杂地震信号时较传统的时频分析方法更有效[8-10]。但传统的希尔伯特—黄变换存在模态混叠和端点效应等问题,导致信号的处理精度下降。因此,文中采用改进的希尔伯特—黄变换方法[8,9]。
首先,利用自回归模型预测地震信号。设x(n)之前的m个数据x(n-m),x(n-m+1),…,x(n-1)为已知,预测值为x′(n),则
y=E{[x(n)-x′(n)]}
(1)
y在预测误差序列与原始序列正交时取得最小值ymin,也就是
E{x(n-k)[x(n)-x′(n)]}=0
(2)
式中:k=1,2,…,m;ak为系数。由式(2)可以导出线性预测方程,其矩阵形式为
(3)
式(3)为m阶自回归模型的正则方程,求得系数ak后,即可求出n+1时刻的预测值。同理,可以推出后续任意时刻的预测值。
采用自回归模型在原始地震信号两侧分别计算两个附加的极大值点和极小值点,再加入k组正/负成对的辅助白噪声,可以得到两组固有模态函数集合,即
(4)
式中:S1和S2分别为加入正、负成对噪声之后的信号;M为原始地震信号;N为辅助噪声。由此得到的信号的个数为2k。
然后对集合中的每个信号做经验模态分解。在对合成信号进行样条插值拟合前,要先采用自回归模型在信号两端分别预测附加的极小值点和极大值点,将预测极值点与信号的极值点相连组成信号的上、下包络线。设bij为得到的第i个信号的第j个固有模态函数分量,通过对所有信号的相应固有模态函数分量求取均值,就可以得到实际信号的第j个固有模态函数分量bj
(5)
最后,选择合适的固有模态函数分量做希尔伯特变换并忽略分解余项即可求得其瞬时参数。
3 年代地层模型的构建
基于层序地层学理论划分沉积期次,根据沉积时间重新排序,然后对某一地质层位进行层拉平,恢复到沉积时的形态及其组合。为了保证从时间域到Wheeler域转换过程的等时性,需要建立适合常规沉积模式的地震数据转换方法。对于地层垂向变化不大、地层发育较齐全的沉积模式,采用地层平分的方式实现地震数据从时间域到Wheeler域的转换;对于地层垂向变化较大、剥蚀和超覆等发育较复杂的沉积模式,采用数据驱动方式精细刻画地质体的三维内部结构和几何形态,实现地震数据从时间域到Wheeler域的转换。主要包括以下步骤。
3.1 地震层位的识别与自动追踪
传统的线性插值和二值化层位追踪算法简单,但效果不理想;基于隐Markov模型和Bresenham算法的层位拾取技术则存在数学模型复杂、检测速度较慢的问题。常规的地震层位追踪更多地考虑地震波的运动学和动力学特征,即将地震振幅、同相轴连续性和波形相似性等信息作为控制参数,存在准确性差、效率低,需要人为指定种子点、训练追踪时间长等问题[11,12]。地震层序分析及沉积体系域解释都需要更精确的地震层位信息,现有追踪算法也缺少小层追踪和层位加密技术支撑[13-16]。为此,采用改进的蚁群追踪算法自动识别地震层位,其包括以下主要环节。
(1)数据预处理。由于直接加载的地震数据中往往存在一些奇异值点,同时,为进一步增强层位数据平滑度和连续性,需要对地震数据做增益处理并滤波,以增强同相轴的连续性。
(2)基于蚁群算法的地震层位追踪。基于蚁群算法的基本思想,实现地震层位的自动追踪。具体包括蚂蚁追踪初始化、支持向量机(SVM)回归预测、蚂蚁层位追踪和层位数据提取四个阶段。与传统的追踪算法不同,该算法不需要人为指定层位种子点,蚁群追踪在初始化后即可在整个剖面上自动追踪,并在振幅极值处留下高浓度的信息素。最后提取这些剖面上出现高浓度信息素的连续节点,从而得到地震层位。
(3)层位追踪后处理。由层位追踪获得地震层位数据后,还需要进一步细分已得到层位。因此层位追踪的后处理就是基于追踪得到的层位对地震数据区域分割,并按照一定的层位细分策略在区域内进行小层加密。
(4)追踪结果输出。整理层位追踪和小层加密结果,按照地震层位标准建立文件输出接口。
3.1.1 数据预处理
地震资料在采集、处理过程中,不可避免地存在各种噪声,影响地震资料的信噪比,导致原始资料幅值变化较大,在层位追踪过程中容易出现中断、层位不连续的情况。因此,利用增强算法对数据平滑处理,降低噪声影响,有效提高层位追踪效果[17-19]。传统的标准中值滤波算法难以兼顾去噪处理和地震资料的细节。
为此,进行算法的改进和优化。首先,通过定义增益参数进行带通滤波,过滤数据中的奇异值;其次,为提高地震层位的连续性,使用快速加权中值滤波器对地震数据滤波,以增强地震数据的平滑度和同相轴的连续性。经过上述处理,最大限度地消除了地震资料中的噪声,保留了地震数据中的细节信息和边缘信息。
在地震数据预处理中,常用的滤波窗口具有不同形状,如线状、十字形、矩形、圆形、圆环形等,尺寸包括5×5、9×9等。为了增强地震同相轴的连续性,一般选择较大的滤波窗口,由此往往造成窗口取值和数据排序的时间效率较低。为了提高中值滤波效率,改进滤波算法,使用最接近的均值代替中值进行处理,将算法的时间复杂度由O(nlgn)降为O(n)(其中n为计算时间),有效提高了算法计算效率。图2为原始地震数据及中值滤波后数据。由图可见,滤波后有效抑制了地震数据的噪声,层位的连续性增强,提高了数据的平滑度和同相轴的连续性(图2右)。
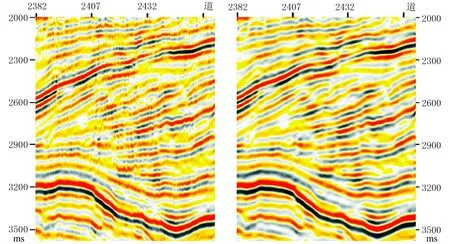
图2 原始地震数据(左)及中值滤波后数据(右)滤波窗口为5×5
3.1.2 建立控制层位
在地震数据上建立上、下两个控制层位(图3),控制层位需要选择具有较强振幅和同相轴连续性的层位。由于不同的控制层位会有不同的Wheeler转换结果,因此控制层位的建立是构建年代地层模型的关键。
基于层序地层学和地震沉积学的理论,在Wheeler域可以清晰地刻画层序地层的垂向沉积期次,根据地质时间重新排序,然后通过对每个年代地层层位进行层拉平,恢复到沉积时的形态及其组合。

图3 地震控制层位模型
3.1.3 层位识别与自动追踪
在层控的范围内,首先采用非线性SVM回归分析对地震数据分类,产生层位点与其他节点的分类集。采用改进的蚁群算法,首先在地震剖面上随机散布蚂蚁,蚂蚁从不同位置、在有限搜索半径内按照搜索算法,对自己能够感知到的层位进行追踪并在信息素矩阵中标记,经多轮追踪后在剖面图信息素矩阵层位点处便会留下较高的信息素浓度。最终,通过提取这些高信息素浓度点得到地震层位。包括SVM回归分类、蚂蚁追踪初始化、蚂蚁层位追踪和层位数据拾取与加密四个阶段。整个过程无需人为指定层位种子点,实现了地震层位的自动追踪。
(1)非线性SVM回归分类
SVM通过引入核函数将最优化分类问题转化到高维度解空间中,降低了计算复杂性,在高维模式识别及分类、非线性问题方面具有独特的优势。对层位点和非层位点分类能显著降低追踪过程的复杂度,提高追踪效率。利用SVM分类能给出对应点属于该类概率的回归分析值,从而以定量方式确定点与层位的相似关系,并为选择需要处理的可能层位点建立定量基础。
1)分类参数的选择
地震地层学理论表明,不同年代地层在岩性特征、沉积厚度和构造上往往具有不同的性质,在地震波形中表现为不同的振幅、相位和频率(三瞬)属性等,对地震层位划分具有指征意义。因此,首先选择三瞬属性对地震数据点初步分类。
2)SVM训练
在确定地震剖面点的分类参数后,可以利用SVM对节点分类[20]。首先对SVM进行训练以建立回归分类模型,SVM训练数据取自待分类的地层剖面,其样本点选择应具备以下条件:①正、负类样本点数量应当相近;②用于训练的样本点应在剖面上分布均匀,以保证训练结果对整个剖面分类的有效性;③为了保证SVM的分类效果,必须有足够的样本数量,但又不易过多,以避免对SVM训练效率产生影响。基于以上原则,训练样本应从地震剖面上选择层位点和非层位点作为训练数据输入SVM。为此,对每个剖面按比例选择蚂蚁对应的层位点和非层位点分类训练,同时对产生样本的蚂蚁按照位置进行循环选择,保证训练层位点在剖面上均匀分布。其中层位点选择是在搜索初始范围最小值点后,通过蚂蚁追踪完成。
样本类型的数量是影响SVM构造的主要因素,为增加非层位点类型[21],使用以下原则选择非层位点:①在初始层位追踪时在蚂蚁搜索步长窗口中找到的幅值最小点;②在追踪过程中小于蚂蚁搜索步长窗口中的幅值均值的任一点。通过上述方式拓展了非层位点的训练数据类型,有效提升了SVM数据分类的准确度。
3)交叉验证
通过训练自动匹配SVM,但此时的分类效果并非最优,训练完成后一般应通过交叉验证调整相关参数,以保证分类效果最优。交叉验证的目的是通过调整参数优化分类效果。因此,交叉验证是使用SVM的一个重要环节。
4)回归分类和优化
对剖面上的节点进行多分类,多分类具有高准确性。为了便于蚁群追踪对节点选择的评价,在使用SVM分类的同时进行回归分析,以取得节点落入相应类别的概率(图4)。
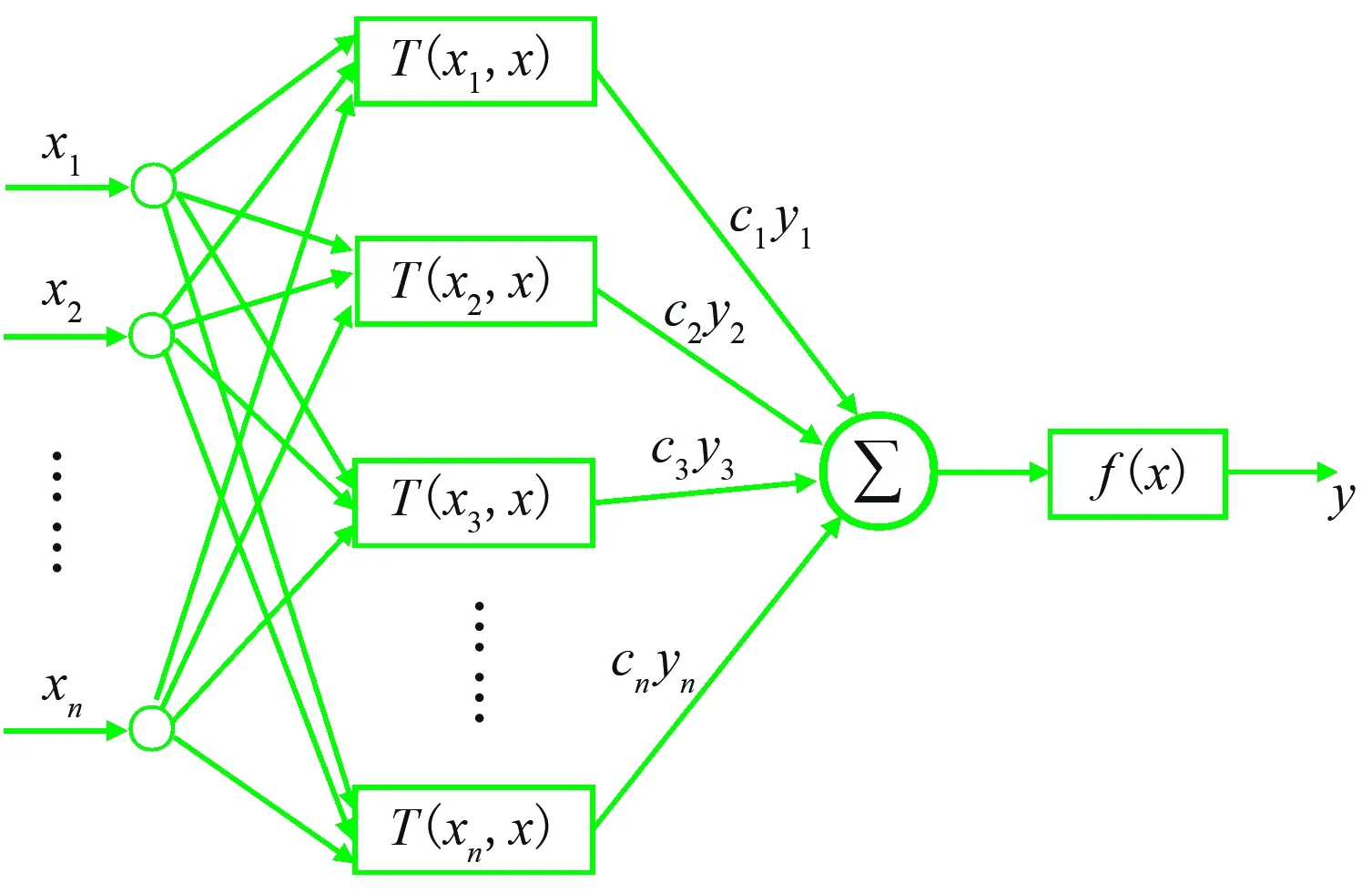
图4 非线性SVM回归分类示意图x、y分别是系统的输入与输出,T是非线性函数,n是SVM的个数,ciyi为Lagrange乘子,f(x)是回归决策函数
在SVM将搜索的节点做基本划分的基础上,蚁群在被划分后的节点集合中搜索。
(2)蚂蚁追踪初始化
首先,设定蚂蚁的初始活动范围,由纵横向追踪步长、初始信息素浓度、信息素浓度参数、信息素更新参数、幅值阈值、追踪角度阈值、失败终止阈值、失败恢复阈值等参数决定(图5),按照初始追踪半径在整个剖面上随机散布蚂蚁(图6)。
(3)蚂蚁层位追踪
完成蚂蚁初始化以及基于SVM的地震数据分类后,便可在地震剖面中散布蚂蚁实施层位追踪。在层位追踪中,节点的评价函数决定蚂蚁如何选择下一节点。为此,定义节点评价函数

图5 追踪参数图
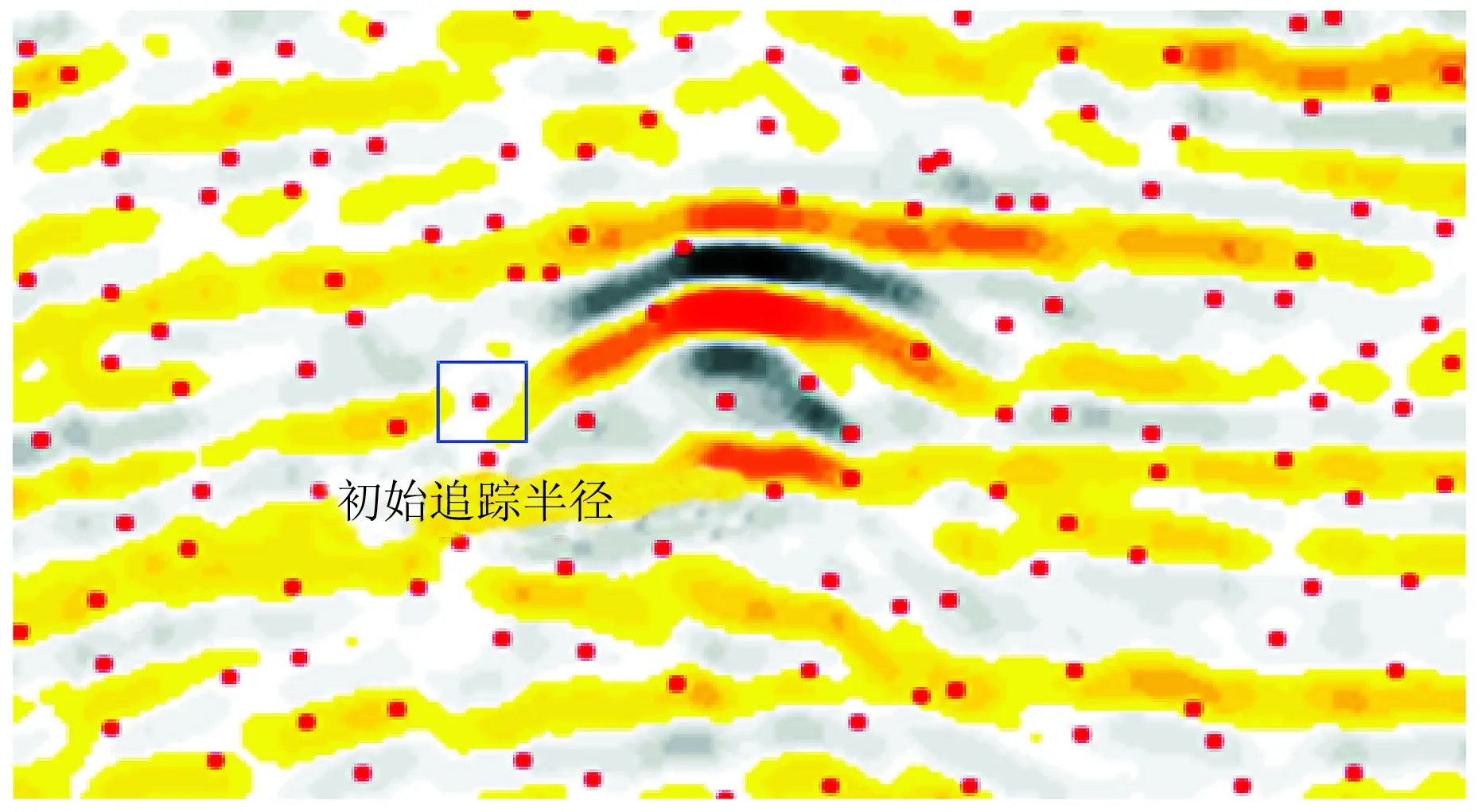
图6 蚂蚁散布
p(a,a′,d,d′,dist,ph)
(6)
式中:a为节点的幅值;a′为最近追踪层位样本点的均值;d为节点倾角;d′为层位当前倾向,即从上一拐点开始层位的斜率; dist为选择节点的距离; ph为选择节点的信息素值;w为权值;r1和r2分别为幅值阈值参数和追踪角度阈值参数,在追踪前可以根据层位特征和经验值进行设置,如对于层位光滑、连续性较好的剖面可以降低参数r2,以进一步提高追踪的精度和效率。

每轮蚁群追踪完成后都需要更新信息素矩阵,更新策略直接影响层位提取。信息素矩阵更新策略为
ph′=ph×ffade+fupd
(7)
式中:ffade为信息素衰减因子,在每轮迭代后,信息素会按照此因子降低;fupd为信息素更新因子,对于未被蚂蚁追踪的节点,此值为0,该值反映了信息素更新的大小以及层位追踪的特点。
按照ffade与fupd处理信息素,但对于地震剖面上连续性好的层位,由于经过的蚂蚁数量多,最终在层位上留下的信息素浓度大;反之,对于连续性不好的层位,由于经过的蚂蚁数量有限而被舍弃。因此在层位间进行蚁群追踪,平衡成为信息素矩阵更新中的重要问题。
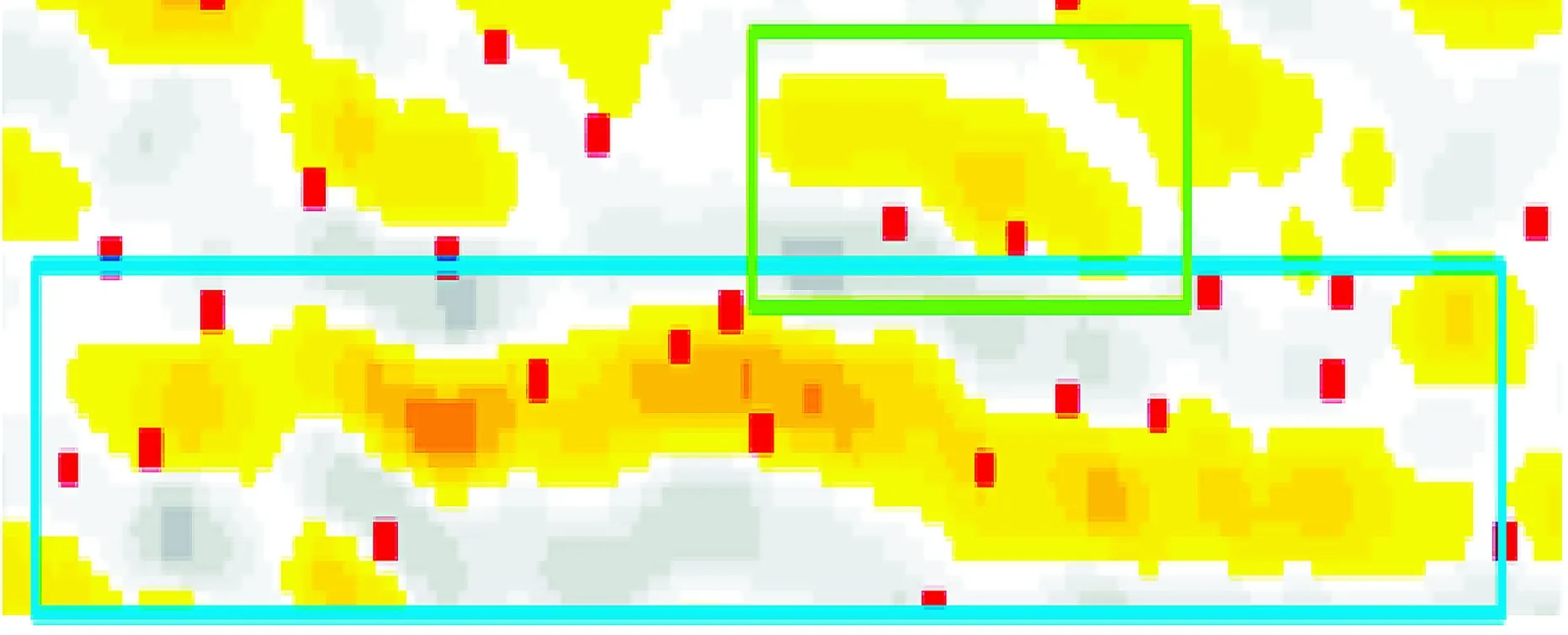
图7 不同层位初始蚂蚁数量
图7为不同层位初始蚂蚁数量。由图可见,由于上部层位较短,仅有2只初始化蚂蚁,下部层位较长,初始蚂蚁数量则超过了10只。因此,如果未对不同层位上的信息素更新进行平衡,短小层位在追踪后必然会被忽略。另一方面,在自然界中,蚂蚁爬过区域的信息素浓度并不随蚂蚁爬行次数的增加而线性增长,在高浓度信息素区域中爬过的蚂蚁并不能明显增加该区域信息素的浓度。因此,本算法记录每只蚂蚁追踪点的更新次数,将更新浓度设置为关于信息素增长速度k与更新次数x的泊松函数,即
(8)
上式使每次更新的信息素得到规律增长,同时抑制了由于大量蚂蚁爬过较长层位导致的信息素浓度过大的情况,避免了求解向少数极大信息素浓度点的过分偏移,体现了蚁群追踪的基本思想。蚂蚁在长层位追踪后,对于信息素的更新按照更新次数降低,并最终达到峰值。始于不同位置的蚂蚁按照选择规律在地震剖面上生成高信息素浓度的层位线,经过多轮爬行后,层位线上的信息素将明显高于环境信息素浓度,为下一步地震层位提取建立了基础。通常将蚁群追踪迭代次数设置为30~50,随后按照地震剖面各点信息素与最大信息素浓度比值得到信息素矩阵和信息素图。图8为迭代30次后蚂蚁追踪生成的信息素图。由图可见,经过蚂蚁追踪,高浓度信息素曲线与剖面中的层位吻合较好。
(4)层位拾取与加密

图8 迭代30次后蚂蚁追踪生成的信息素示意图红色为信息素浓度最大值的80%,绿色为信息素浓度最大值的60%
虽然蚂蚁追踪在多轮迭代后能得到与地震层位对应的信息素矩阵图,但信息素矩阵图是基于单点绘制的,不能体现层位信息。因此,需要扫描信息素矩阵进而得到地震层位数据,且在层位扫描时需要考虑层位之间的相对关系。由于地下地质构造的复杂性,地震层位之间可能存在超覆、尖灭、削截等现象,但是层位不能互相穿越;另外,由于存在断层等构造现象,两个相邻层位并不能直接相连(图9),需要使用相干性判别准则对断层附近的追踪层位连接。层位提取扫描算法按照从上向下、从左到右的顺序进行,在道集方向上寻找、标记长层位,在处理短小层位时使用掩码矩阵判定层位穿层。对于相邻层的连接,则采用C1相干性算法进行判定,根据在计算层位线结束侧邻近范围内找到的层位起始点及其相干值,通过选择连接相干性大于指定阈值的层位或者中断当前层[22]。通过相干性连接判定,避免了因断层存在而引起的层位不连续。
层位合并是将相邻的高信息素节点合并为一层,同时,通过延长节点提高层位线方向的连续性。
穿层处理是在追踪过程中,对将出现穿层的节点进行尖灭(图9)。
完成层位拾取后,采用OpendTect层位加密策略加密地震数据体内的小层[23],实现精细层序地层划分,并得到4种年代地层计算模型(图10)。
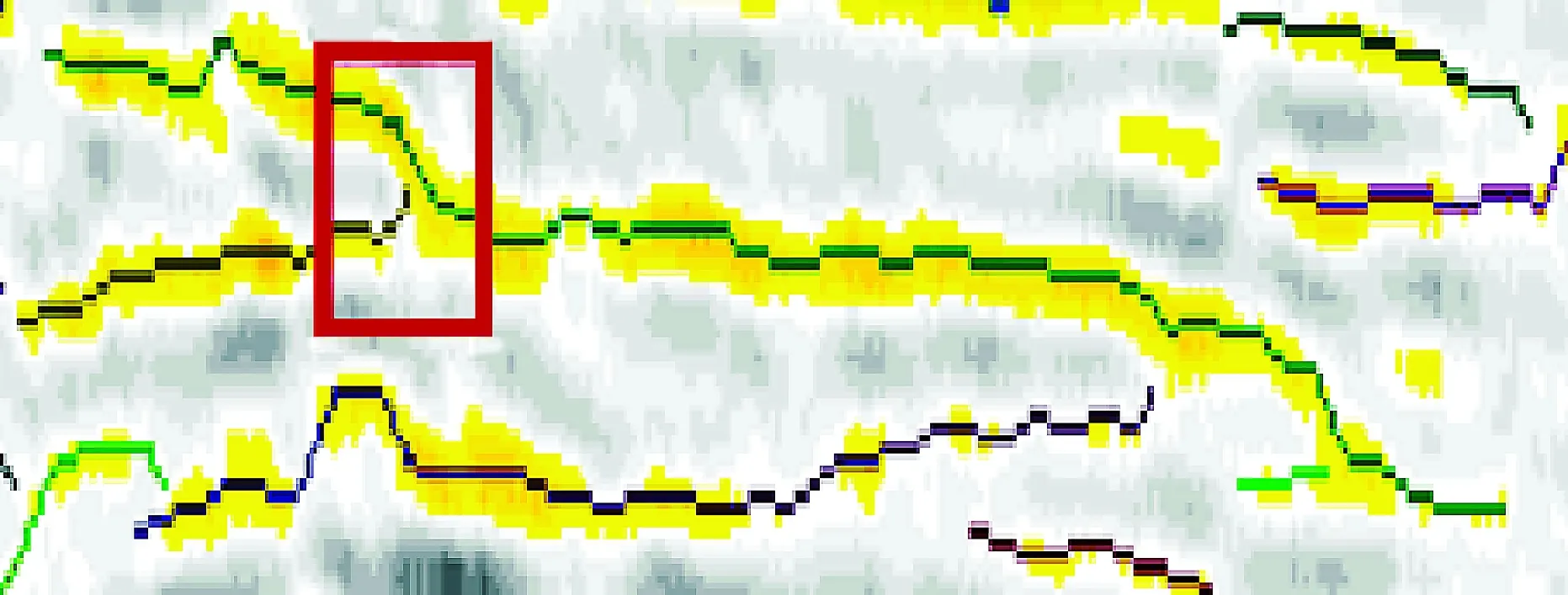
图9 层位拾取中的层位尖灭

图10 年代地层计算模型(a)线性插值; (b)平行于顶; (c)平行于底; (d)数据驱动
3.2 Wheeler域转换
3.2.1 基本原理
基于层序地层学和地震沉积学的理论,通过自动追踪地震层位,建立等时地层格架,划分沉积期次,按照地质时间重新排序,然后结合地质层位进行层拉平,恢复到沉积时的形态及其组合。
图11为时间域与Wheeler域转换对比图。由图可见,通过对每个年代地层层位进行拉平实现Wheeler转换。因此,在Wheeler域可以清晰地刻画层序地层的垂向沉积期次。

图11 时间域(a)与Wheeler域(b)转换对比图
Wheeler域中的空白区代表该时期无沉积发生或沉积地层遭受剥蚀,近物源空白区可能是由于沉积地层被剥蚀形成的,远物源空白区是无沉积作用形成的
3.2.2 实现方法
在等时地层格架约束下实现层控下的地震层位自动追踪和加密,建立不同沉积模式的等时地层切片,实现把追踪到的层位拉平到对应的相对地质年代域,即通过拉平每个地质年代同相轴进行Whee-ler变换[24]。基于地震相,通过Wheeler转换研究沉积相,并可以在Wheeler域研究沉积体的空间演化规律,进行储层演化分析,描述有利储层的分布。
为了保证从时间域到Wheeler域转换过程的等时性,需要建立适合常规沉积模式的地震数据转换方法。对于地层垂向变化不大,地层发育较齐全的沉积模式,采用地层平分的方式进行Wheeler转换;对于地层垂向变化较大,剥蚀、超覆等沉积现象较复杂的情况,可以采用数据驱动精细刻画地质体的三维内部结构和几何形态,然后进行Wheeler转换,实现地震数据从时间域到Wheeler域的转换。Wheeler转换主要包括以下三个步骤。
(1)建立控制层位。在地震剖面上建立上、下两个控制层位(图11a),要求层位有较强的连续性和振幅。建立控制层位是Wheeler转换的关键,因为不同的控制层位有不同的Wheeler转换结果。
(2)层控范围内层位自动追踪。采用非线性SVM回归分析对地震数据分类,基于蚁群算法的基本思想,首先随机散布蚂蚁,蚂蚁从剖面不同位置开始对自己能够感知到的层位进行追踪并在信息素矩阵中标记,经多轮追踪后剖面图信息素矩阵层位点处便会留下较高的信息素浓度,最终,通过提取这些高信息素浓度点得到地震层位。包括蚂蚁追踪初始化、SVM回归预测、蚂蚁层位追踪和层位数据提取四个阶段。整个过程无需人为指定层位种子点,实现了地震层位的自动追踪。
由于地下地质状况的多样性,如存在断层等构造现象,需要使用相干性判别准则对断层附近的追踪层位连接,并借助掩码矩阵判定层位穿层。当完成层位拾取后,采用层位加密策略对地震数据体内的小层加密,从而实现精细的层序地层划分,其中小层加密采用线性插值、平行于顶、平行于底和数据驱动等4种加密策略(图10)。
(3)拉平追踪层位。对地震地层格架内部层位追踪即可获得层序内部的层位,把追踪到的层位拉平到对应的相对地质年代域,即通过拉平每个地质年代同相轴进行Wheeler变换,由此构建与之相对应的等时年代地层框架模型,能够明显地识别地层缺失和沉积间断,并检验层序地层划分结果的合理性,为开展层控薄储层预测提供可靠的层位数据。
根据图像映射原理转换映射时间域地震数据和Wheeler域年代地层数据,即
(9)
式中:T′为地震资料对应的时间;t′为Wheeler域数据对应的时间;T1为层位1地震数据对应的时间;T2为层位2地震数据对应的时间,t1为层位1 Wheeler域数据对应的时间;t2为层位2 Wheeler域数据对应的时间。由此,实现将时间域的两个地震层位转换到Wheeler域的年代地层时间。
4 实际资料应用
研究对象为中国W油田Y9井区的高精度地震数据及Y91、Y92、Y93井的测井数据,地震资料的主频为28Hz,在纵向上无法分辨10m的薄储层。研究区在沙三中前三角洲发育大量浊积砂体,为有利的含油气储集体,是油田重要的勘探目标。由于砂体厚度小于10m,薄储层的预测难度较大。首先,对原始地震数据进行改进的加权中值滤波,不难看出,原始地震资料(图12左)经中值滤波后同相轴的连续性明显增强,信噪比显著提高,有利于同相轴追踪(图12右)。
然后,在等时地层格架下选择T4和T6标准层作为上、下控制层,基于SVM回归分析对地震数据分类,进而采用改进的蚁群算法在层控范围内实现地震数据的层位自动追踪(图13)。在沉积体系域解释之前,结合单井层序划分结果进行分析(图14),按照层序由大到小的顺序,在沙三中内识别出SB1、SB2、SB3等3个大的层序界面,将沙三中划分为SQ1、SQ2、SQ3、SQ4等4个中级旋回。从连井层序对比来看,SB1、SB2、SB3等层序界面分别对应三角洲Es3z3、Es3z4和Es3z6砂组的顶界面,通过Y91井精细合成记录标定结果(图15)得到浊积岩(砂体)的范围。在单井层序分析的基础上,通过小层自动追踪建立精细地层层序格架,然后对过Y91井地震剖面进行Wheeler转换,并在时间域和Wheeler域开展沉积体系域同步解释。图16为过Y91井地震剖面的Wheeler转换后的年代地层及体系域划分结果。
图17为CrosseLine 23剖面时间域和Wheeler域的沉积体系域同步解释结果交互显示,能够直观地展示各个层次在地震剖面上的分布情况,进一步验证了层序划分结果。
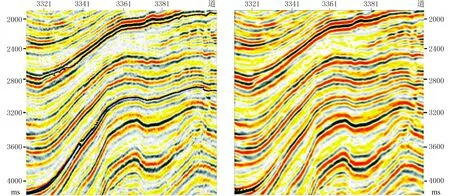
图12 原始地震资料(左)及其中值滤波结果(右)采用9×9圆形时窗

图13 中值滤波结果的地震层位自动追踪(左)及其层位加密前(中)、后(右)镂空结果

图14 Y91井单井层序分析

图15 Y91井精细合成记录标定结果

图16 过Y91井地震剖面的Wheeler转换后的年代地层(左)及体系域划分结果(右)
利用钻井资料统计出沙三中不同岩性的平均速度及厚度,根据调谐厚度λ/4(λ为波长)分辨原理可知,储层的最佳响应频率约为65Hz,因此选择50~70Hz的高频调谐体突出储层反射(图18),结合单井综合录井图,通过合成记录精细标定浊积岩(砂体)的发育位置。图19为原始地震资料与调谐体的时间切片、沿层切片对比。由图可见:高频调谐体更加精细地反映了井周围的砂体展布特征,很好地展示了同一期次沉积体的地震响应特征,提高了薄储层的预测精度;与原始资料相比,高频调谐体的分辨率更高,与井上储层对应关系更好,能够精细地刻画薄层砂体。将高频调谐体与实际钻井数据结合,能够进一步圈定浊积岩储层的分布范围。
将高频调谐数据体与由Wheeler域分析得到的等时层位相结合,对该区沙三中浊积岩薄互层进行预测。图20为原始地震数据、高频调谐体及井资料的薄互层预测结果。由图可见:Y93井位于浊积岩砂体中部,单砂体厚度约为5m(图20c),高频调谐体的储层预测结果呈红色(图20b),原始地震数据的储层预测结果呈淡黄色(图20a);Y91井位于浊积岩砂体的边缘位置,单砂体厚度小于5m(图20c),高频调谐体的储层预测结果呈红、黄色(图20b),原始地震数据的储层预测结果呈蓝色(没有钻遇浊积岩)(图20a);Y92井基本没有钻遇浊积砂体(图20c),原始地震数据(图20a)与高频调谐体(图20b)的预测结果都位于蓝色区域,代表砂体不发育,结果基本一致。综上所述,高频调谐体的储层预测效果要好于原始地震数据。

图18 原始地震剖面(左)及50~70Hz高频调谐剖面(右)泥岩平均速度为2600m/s,砂岩平均速度为2800m/s,砂、泥岩平均速度为2700m/s,目的层砂、泥岩薄互层厚度为20m,单砂体厚度小于10m

图19 原始地震资料与高频调谐体的时间切片(左)、沿层切片(右)对比
5 结论
以层序地层学和地震沉积学等理论为指导,首先,采用分频技术提取不同频段地震数据调谐体。然后,在等时地层格架约束的地震层位自动追踪和拾取的基础上,在时间域结合沉积旋回特性将层位追踪结果进行Wheeler域转换,构建地层对比和年代地层格架,实现年代地层和沉积体系域的同步解释,有效揭示了沉积组合间的空间关系,进而提取高频调谐体地层切片,实现层控薄储层预测,通过等时界面有效提高了薄砂体的横向预测精度。上述方法既能发挥地震数据的高纵向分辨率的优势,又能在Wheeler域发挥等时切片的横向分辨率的优势,减小了储层解释的多解性,提高了储层预测精度,为薄储层的识别提供了新的技术思路。