基于元胞自动机的竞争型换道模型
2018-11-28杨晓芳
李 硕,杨晓芳
(上海理工大学管理学院,上海 200093)
0 引言
近年来,随着城市道路系统的发展,汽车保有量不断增加,交通事故也日益增多。在众多导致交通事故的因素中,驾驶行为的影响不容忽视。车辆驾驶行为中变换车道和驶离车道行为造成的事故占总事故数的28%和15%[1]。在上述驾驶行为中存在一些非常规驾驶行为,如激进型、竞争型的驾驶行为,对道路交通安全造成了较大的负面影响[2]。竞争型驾驶是通过争夺路权、空间和速度的领先优势从而达成驾驶人员自身目的的驾驶行为。对这一现象进行研究,有助于更好地研究驾驶行为,对提高道路通行能力和保障道路安全具有重要意义。
驾驶员的驾驶行为作为一个复杂的过程,受到了国内外学者的广泛关注,目前国内外已有不少对换道过程中驾驶行为的研究[3-5]。对于竞争型驾驶的研究,李鹏飞等[6]利用计划行为理论分析竞争驾驶产生的原因以及社会环境因素对竞争驾驶的影响;李鹏飞等[7]还分析了竞争与协作换道的特征,确定了竞争与协作换道的接受间隙的临界值;Sun等[8]基于目标车道后车决策行为,提出了竞争/合作换道行为;Hidas[9]建立了拥堵环境下的车辆换道模型,对换道过程中车辆速度以及可接受间隙变化进行了研究。竞争驾驶行为已成为城市交通中的一种常见现象,但目前对这种行为对交通流的影响研究还比较欠缺。
元胞自动机(Cell Automata,CA)模型因为其演化规则简单,易于实现且能有效模拟车辆微观运动的状态,在交通流研究中得到了广泛应用[10-12]。在基于元胞自动机的驾驶行为方面,学者们做了大量研究。Li等[13]利用元胞自动机对双车道下激进型驾驶员的换道行为进行研究,发现乒乓换道行为的发生主要是因为快车受到前车的阻挡;王永明等[14]基于驾驶员的性格提出了车辆换道规则,并研究了不同换道规则对交通流量的影响;李娟等[15]运用元胞自动机提出了自由换道、强制换道、协作换道的换道规则,发现了协作换道有利于提高交通流速度,缓解交通压力;Lárraga等[16]从驾驶员反应方面进行研究,考虑车辆加速度、加速和减速3个参数,将速度变化与实际数据进行对比;敬明等[17]根据跟驰行为提出了双车道元胞自动机模型,该模型对亚稳定态的模拟较为准确。
上述基于元胞自动机模型的换道驾驶行为研究中,对特定驾驶行为比如竞争型的换道行为研究还比较少。本文在原有元胞自动机模型的基础上,结合已有的对竞争驾驶的研究,充分考虑车辆换道时的交互行为,通过引入竞争程度这一变量,建立模型使得车辆的换道间距与竞争程度有关;重新定义换道规则,建立符合竞争型驾驶实际的元胞自动机模型;并在计算机上进行模拟仿真,分析其对交通流的影响。
1 换道行为分析
车辆在道路上行驶主要涉及的驾驶行为有跟驰行为和换道行为。在换道过程中,车辆由原车道换到目标车道较常发生车辆间的事故,因此车辆换道时的交通安全问题需要注意。典型的换道行为主要包括需求产生、换道条件判断、换道操作3个阶段。如图1所示,n车为有意换道的车辆(本文称为目标车辆),n-1为目标车辆前车,n+1为目标车辆后车,m-1为目标车道上n车的前车,m为目标车道上n车的后车。当n车当前速度不能满足驾驶员的期望速度,并且邻车道的驾驶环境比本车道好时,n车产生换道需求;然后驾驶员会根据n车与目标车道m车和m-1车的距离,判断是否满足换道条件,若满足换道条件,车辆就会进行换道操作达到其目的。
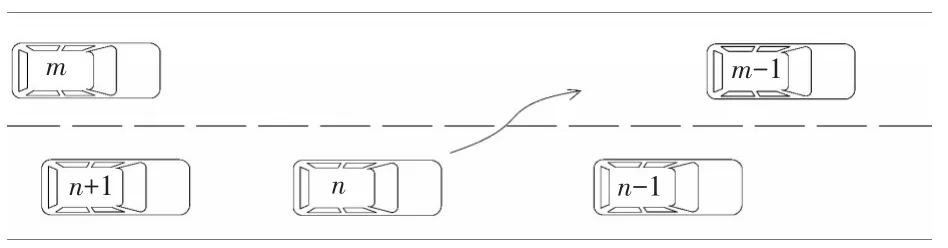
图1 车辆换道示意图
本文将换道类型分为3类:自由换道、协作换道和竞争换道:(1)自由换道:在目标车辆n的换道过程中,目标车道上后车m车与前车m-1车对目标车辆n不会产生影响;(2)协作换道:换道车辆n发出换道信号,m车主动减速协助其换道;(3)竞争换道:n车发出换道信号,m车没有主动减速,此时n车仍要换道,则为竞争换道。以上3种模型的主要区别是车辆产生换道需求后,目标车辆与目标车道后车的相互作用程度。自由换道中,n车与m车之间几乎没有相互影响;协作换道中,n车产生换道需求后,转向灯亮起,m车通过减速为n车创造更大的换道空间协助n车换道,n车与m车的相互作用比较和谐;而在竞争换道中,n车产生换道需求,转向灯亮起后,m车并没有减速,n车为了换道会与m车产生激烈的竞争,相互影响,抢夺路权。在传统的对称双车道元胞自动机(Symmetric Two-Lane Cellular Automata,STCA)模型中,其换道规则[18]如下:

式(1)中:dn,n-1,dn,m-1,dn,m分别为n车与原车道前车的距离(m),与目标车道前车的距离(m)和与目标车道后车的距离(m);dsafe为模型中的安全车距(m);vn为n车速度(m/s);vmax为车辆最大速度(m/s)。
该换道规则表示当目标车辆n车在原车道受阻且在邻车道上可以达到更快的速度,同时n车与目标车道后车m车的距离符合安全换道间距,则进行换道。这一模型中换道规则单一,不能很好地表现车辆换道时的多样性。
2 基于元胞自动机的竞争型换道模型的建立
2.1 换道需求判断
传统的换道需求判断一般是根据瞬时的速度优势进行的,这一短暂的瞬时利益对于驾驶员来说只是一个临时需求,用瞬时的速度优势进行换道需求的判断会导致车辆的频繁换道,这与实际的交通情况是不相符的。为了避免乒乓换道,本文根据速度累积优势来进行换道需求的判断[19]。
如图1所示,邻车道速度累积优势是由目标车道前车m-1的速度vm-1和目标车辆前车n-1的速度vn-1共同决定;当n-1车和m-1车的速度大于n车的期望速度vn-exp时,用vn-exp代替vn-1,vm-1。

式(2)中:Va(t+Δt)为t+Δt时刻的邻车道速度优势累积值(m/s);Va(t)为t时刻的邻车道速度优势累积值(m/s)。
初始时刻车辆的速度优势累积值为零,其在行进过程中不断进行速度优势累积的计算。当速度优势累积值大于临界值时,则产生换道需求,从而进行换道条件的判断。如果换道条件满足则进行换道;如果换道条件不满足,则继续进行速度优势累积值的计算。在这一过程中,若速度优势累积值小于零,表示驾驶员对车辆当前的速度较为满意;若速度优势累积值大于零,表示驾驶员希望通过换道来提高车辆的速度。
2.2 模型建立
当车辆的速度优势累积值满足条件时,其会进行换道条件的判断。当换道间隙gap大于临界换道间隙gap1时,车辆进行自由换道;当换道间隙gap小于临界换道间隙gap1时,车辆以p1的概率进行竞争换道,以1-p1的概率进行协作换道。
2.2.1 自由换道
当换道间隙大于gap1时,n车换道对目标车道后车m没有任何影响,m车可以以跟驰的状态继续跟驰,n车以恒定加速度进行换道。此时称为自由换道,则n车和m车的速度和位置更新如下:
速度更新:
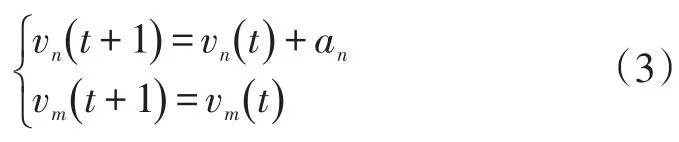
位置更新:
式(3)~式(4)中:vn为n车速度(m/s);vm为m车速度(m/s);an为n车加速度(m/s2);Xn为n车位置(m);Xm为m车位置(m)。
当换道间隙小于gap1,n车有换道意向时,首先n车会打开转向灯,同时不会直接进行换道,而是以跟驰状态继续跟驰n-1车并观察目标车道后车m的反应,此时m车有两种反应的可能:
(1)同意n车的换道请求,刹车灯亮起,以一定的减速度进行减速,为n车的换道腾出足够的空间,两车进行协作换道;
(2)不同意n车的换道请求,刹车灯不亮,保持原来的速度或加速前进,此时n车如果还要换道则为竞争换道。
2.2.2 协作换道
当n车的转向灯亮起,m车的刹车灯也亮起时,则为协作换道。m车会通过减速来满足n车换道的间距,这一过程可能要经过几个单位时间,本文适当进行简化,认为在下一时刻m车的减速即满足换道条件,给n车换道;下一时刻速度m车速度为为满足换道条件所需的减速度,安全换道间距为dsafe,即满足时n车进行换道。
协作换道中n车和m车速度更新与位置更新计算公式同式(3)、式(4)。
2.2.3 竞争换道
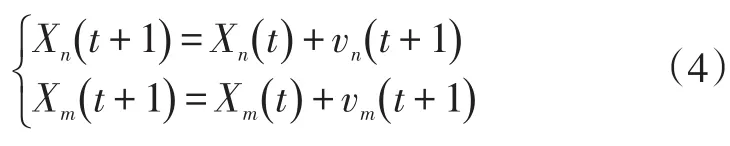
当n车的转向灯亮起,而m车保持原速或加速前进时,则为竞争换道。之前对竞争换道的研究只考虑了目标车辆与目标车道后车的相互关系,没有考虑目标车道前车的影响。但在实际的换道过程中,目标车辆不仅会与目标车道后车产生相互关系,目标车道前车也会对目标车辆的换道产生影响。为了描述换道过程中车辆的相互作用和竞争的激烈程度,引入竞争程度f的函数,并且定义竞争程度同n车与m-1车和m车的车间时距有关。
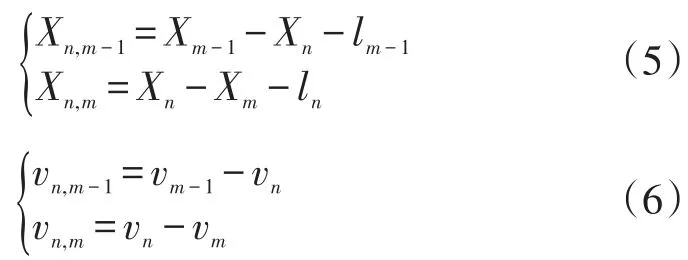
式(5)~(6)中:Xn,m-1,Xn,m为n车与m-1车和m车的距离(m);vn,m-1,vn,m为n车与m-1车和m车的速度差(m/s);lm-1,ln为m-1车和n车车辆长度(m)。
则n车与m-1车和m车的车间时距tn,m-1,tn,m计算公式为:
得到竞争程度函数f(tn,m-1,tn,m)的计算公式如下:

式(8)中:tl-exp为期望目标车道前车车间时距(s);tf-exp为期望目标车道后车车间时距(s);r1,r2为权重系数,r1+r2=1。
当为竞争换道时,n车与m-1车和m车的车间时距越小,与就越小,也越小,则f越大,竞争越激烈。同时因为f∈(0,1),越靠近1时说明车辆间竞争越激烈。车辆间竞争越激烈,车辆的速度变化越大,则速度波动越大,所以通过竞争程度来预测车辆的加速度变化,重新定义换道规则。n车此时的加速度为最大加速度(m/s2)。m车以pm概率加速,以1-pm概率减速,m车的加速度为am(m/s2),其计算公式如下:
式(9)中:为最大减速度(m/s2)。
竞争换道中n车和m车速度更新与位置更新计算公式同式(3)、式(4)。
3 仿真结果分析
本文对上述建立的自由换道、协作换道以及竞争换道模型进行仿真分析;本文模型采用开放的边界条件,仿真设置两条车道;车道1为车辆所在车道,车道2为换道目标车道;两条车道均由5 000个元胞组成,每个元胞尺寸代表1.5m,道路总长度为7.5km,每辆车占据5个元胞单位(包括车辆长度和前后安全距离);设置车辆的最大速度vmax=20,相当于实际中100km/h,临界换道间隙gap1=vmax=20,最大加速度与减速度为5个元胞长度,随机慢化率p取0.25,每次仿真步长为1 000。
3.1 不同交通密度条件下交通流量分析
根据以上设置的参数,对自由换道、协作换道和竞争换道进行仿真;改变车辆密度,观察道路交通流量的变化。通过仿真得到的结果如图2所示。
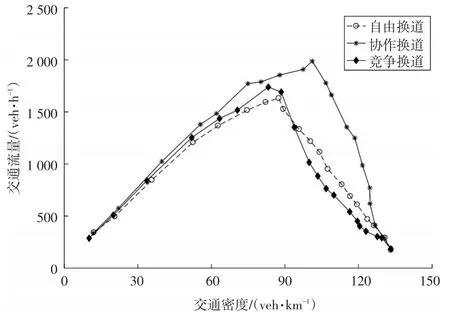
图2 交通流量与交通密度关系图
由图2可知,当交通密度较低时,车辆有足够的空间自由行驶,换道行为较少发生,3种换道模型的车流量基本相同。随着密度的增大,车辆受周围车辆的影响,在进行换道时,采用协作换道的车流量比另外两种模型高。对比3种模型流量的最高值,自由换道和竞争换道的流量最高点比较接近,说明竞争换道对最大通行能力的提升不明显;而协作换道的最大流量比另外两种模型高,说明协作换道能有效提升道路通行能力。当密度小于90veh/km时,竞争换道的流量比自由换道要高;当密度超过90veh/km时,竞争换道的流量低于自由换道。对比可知,协作换道能提高道路通行能力,使道路资源得到充分利用。当密度不高时,竞争换道在一定程度上能提高道路流量;当到达高密度区时,竞争换道会对道路交通产生负面影响,使道路通行能力降低。
3.2 不同交通密度条件下车辆速度分析
改变交通密度,观察车辆平均速度的变化,通过仿真得到的结果如图3所示。
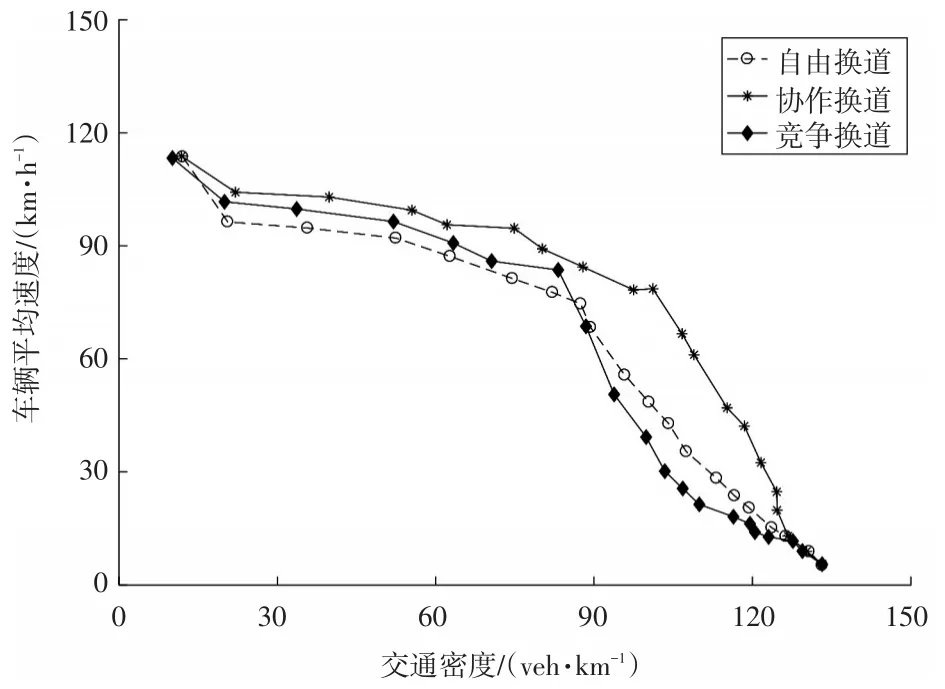
图3 车辆平均速度与交通密度关系图
在交通密度较小时,满足车辆自由行驶的条件,车辆速度变化不大,3种模型的区别不大。伴随着密度的增大,受周围车辆的影响,车辆行驶速度降低,为寻求速度优势,换道期望增加。由图3可知,车辆在选择协作换道时,所获得的平均速度最高。对于自由换道和竞争换道,在密度小于90veh/km时,竞争换道的平均速度大于自由换道的平均速度;在密度大于90veh/km时,自由换道的平均速度大于竞争换道。这是因为,在低密度区,采用自由换道,车辆速度的变化不大;采用竞争换道,可以为车辆带来更高的速度。而到了高密度区,车辆如果选择自由换道模型,换道条件基本不能满足,换道车辆大幅减少,车辆只能在本车道进行跟驰,车辆速度下降得非常快;选择竞争换道的车辆,车辆车间距相对较小,当车辆通过竞争换道至目标车道后,必然造成目标车道上的后车减速,从而使得上游车辆依次减速造成速度的波动较大,速度甚至会小于自由换道的平均速度,并且容易带来安全隐患。
3.3 不同交通密度条件下换道次数分析
改变交通密度,观察车辆换道次数的变化,通过仿真得到的结果如图4所示。
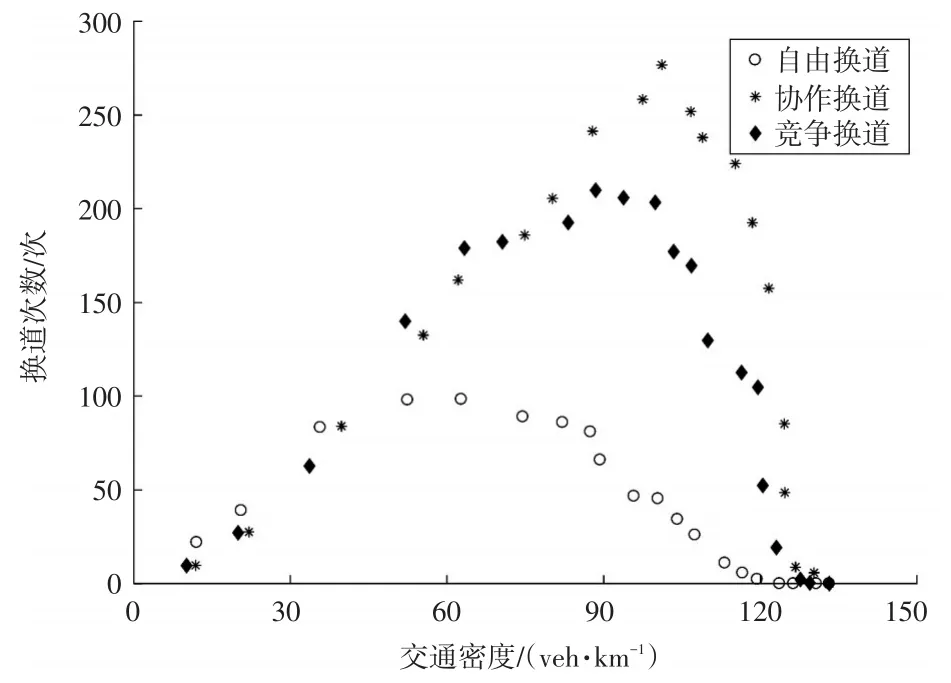
图4 换道次数与交通密度关系图
当交通密度较小时,道路资源充裕,车辆换道次数较少,3种模型的差别不大。随着密度增大,当密度达到60veh/km左右时,自由换道的换道次数到最高峰,随后就开始下降。而竞争换道和协作换道因为换道条件没有自由换道苛刻,所以车辆换道次数一直增加,但竞争换道的换道次数小于协作换道,这符合实际交通状况。在密度达到100veh/km左右时,竞争换道次数达到最高值;在密度达到105veh/km左右时,协作换道的换道次数达到最高值,之后因为道路接近饱和状态车辆换道困难,车辆协作换道与竞争换道的换道次数呈现断崖式下降。
4 结论
本文利用元胞自动机理论对自由换道、协作换道和竞争换道3种换道方式进行了建模分析,建立适合不同换道方式的换道规则及更新方式;主要考虑了换道间隙,建立了自由换道模型;在车辆信息交互的基础上,考虑驾驶员的行为特性,建立了协作换道和竞争换道模型;在建立竞争换道模型时,考虑换道车辆与目标车道前后车的车间时距,通过引入竞争程度来判断车辆间争夺路权的激烈程度,通过竞争程度定义车辆换道的加速度及目标车道后车的加速度,建立新的换道规则。通过对3种模型的仿真对比可知,协作换道得到的各项结果高于其他模型,说明协作换道提高了道路的通行能力,使道路资源得到充分利用;竞争换道在交通密度较低时,可以在一定程度上提升车辆速度以及车流量,但到了高密度区,竞争换道中存在的不确定性会对交通流产生一定的负面影响,车辆速度会降低,并影响道路的通行能力,对车辆行驶的安全性也有一定的影响。
对竞争型驾驶行为的研究目前还比较欠缺。针对以往的换道研究中对目标车道前车考虑较少的情况,本文在创建竞争换道模型时考虑了目标车辆与目标车道前后车的关系,引入竞争程度并定义新的换道规则,描述竞争换道对交通流的影响。但本文欠缺对竞争换道时车辆换道概率的影响因素的研究,今后需进一步研究竞争程度与车辆换道概率的关系。
