一种特征模板匹配的水声识别系统的设计与实现∗
2018-11-28张振华
张振华 吴 宁 俞 剑
(1.中国电子科技集团公司第二十八研究所 南京 210007)(2.中国人民解放军91458部队 三亚 572021)
1 引言
1.1 水声目标识别
水声目标识别技术,无论是民用的海底鱼群探测、冰山礁石探测、深海环境探测,还是军用的鱼雷探测、潜艇探测以及反潜作战等,都很有现实意义,尤其是在军用领域,所谓知己知彼,百战不殆,实时准确的识别,是克敌制胜的关键。
目前水声目标识别面临两个主要问题:其一,水声目标类别繁多,如潜艇、水面舰、鱼雷、商船、渔船以及各种海洋生物,甚至暗礁、沉船等。其二,异类水声目标间的特征存在相似性,使得识别任务面临很大干扰[1]。因此,虽然当前对于水声目标的识别手段日渐丰富,但如何有效利用好这些识别方法,取长补短;如何充分运用特征模板匹配方法,通过大数据技术充实数据库资料,再逆向完善匹配模板,从而最终构建基于模板匹配的水声综合识别系统,已成为提高水声目标识别率的急需。
1.2 特征模板匹配技术应用
特征模板匹配技术,是在大数据应用基础上用于目标识别的一种行之有效的方法。
一方面,“大数据”技术发展的大背景下,在水声识别领域,随着各类水声目标特征数据采集、汇总和存储量的不断增加,为了能够有效使用长期积累下的数据,就必须考虑大数据特征模板匹配及信息处理技术,诸如信息存储、安全、加工等技术[2~3]。
另一方面,由于大数据是目前较时新的一门技术,应用于水声识别领域也还只是个尝试和验证,本文涉及的有关大数据的应用还仅限于原型系统初步实现阶段。充分运用采集的大量数据,并归类整理,形成相应的识别模板或参考静态资料,为水声目标识别提供匹配模板和人工复核干预依据,这是关键。同时,也可通过得到的准确识别结果,对大数据体模板进行修订、装载,进一步丰富匹配模板的要素,也能为下一步的识别做指示更新。
2 系统总体设计
2.1 总体框图
水声识别原型系统的总体框架组成,如图1所示。

图1 系统总体框架组成图
1)基础设施层:主要为系统提供最基础的硬件设施、运行环境等;
2)系统平台层:为各功能软件运行的系统环境、传输协议、通用服务以及数据库应用等做支撑;
3)功能业务层:系统的业务实现层,主要为后端的综合识别分析做信息输入,不涉及声纹分析、提取、比对等声学专业特征分析等;
4)展示操控层:是全系统的展示界面,包括目标态势的示意显示、表格的分类显示、收集大量数据的资料维护以及最终识别结果的人工干预与复核等。
2.2 功能模块组成
本系统的功能业务模块的概要组成结构如下图2所示。

图2 功能业务模块组成图
1)界面展示:实现目标信息展示、信息维护管理、声音播放编辑、人工操控干预等功能;
2)A类声纳识别服务:实现A类型声纳识别结果的目标信息接收、预处理、干预、入库等功能;
3)B类声纳识别服务:实现A类型声纳识别结果的目标信息接收、预处理、干预、入库等功能;
4)关联融合服务:实现多类型声纳目标识别结果信息的关联分析与融合处理;
5)人耳判听分析:辅助人耳听觉,提高人的主观能动性,剔除一些异常信息,或筛出一些明显信息;
6)目标数据维护:依据日常收集的各类信息,进行人工的整理、编辑、归类、汇总、入库、存储、查询、调阅、提取、模板制作、修订、装载等操作,为综合识别做大数据业务支撑;
7)综合识别判性:依据各类型声纳识别结果、各种识别方法以及大数据体匹配模板,实现最终判性。
3 详细设计
3.1 信息流程设计
依据系统功能和模块划分,设计信息处理流程如图3所示。
3.2 开发环境
开发环境如下:
1)前台软件:操作系统 Windows 7-64bit,编译环境QT4.84+VS2010;
2)服务器软件:操作系统 Windows 7-64bit,编译环境QT4.84+VS2010;
3)数据库:Oracle 11g。
3.3 系统部署
3.3.1 部署架构
系统软件部署架构,如图4所示。
3.3.2 部署环境
部署环境如下。
1)前台硬件资源:Inter I5,内存 4GB,硬盘160GB;
2)服务器硬件资源:Intel至强E5-2600,内存16GB;
3)磁盘阵列:存储容量4TB;
4)前台软件:操作系统Windows 7-64bit,具备基础网络服务,安装Oracle 11g以及数据库基础服务插件;
5)服务器软件:操作系统 Windows Server 2008 R2,具备基础网络服务,安装Oracle 11g以及数据库基础服务插件。
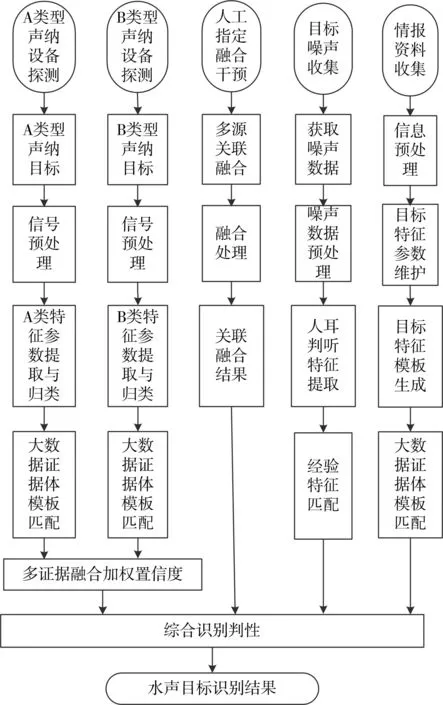
图3 系统信息处理流程
4 系统功能模块实现
4.1 界面展示
前台界面示意如图5所示。
4.2 A类声纳识别
具体实施流程如下:
1)总体上,根据大量收集的数据,依据A类声纳目标的信号特点,剪切出A类目标特征模板,供自动识别判性时使用;
2)人机交互界面发起A类声纳目标识别申请,待识别结束后,获取识别结果A;
3)将识别结果A回显至前台界面,供参考;
4)将比较明确的属性字段,存储进A类目标数据库,作为大数据体模板,长期积累,丰富数据库样本内容。
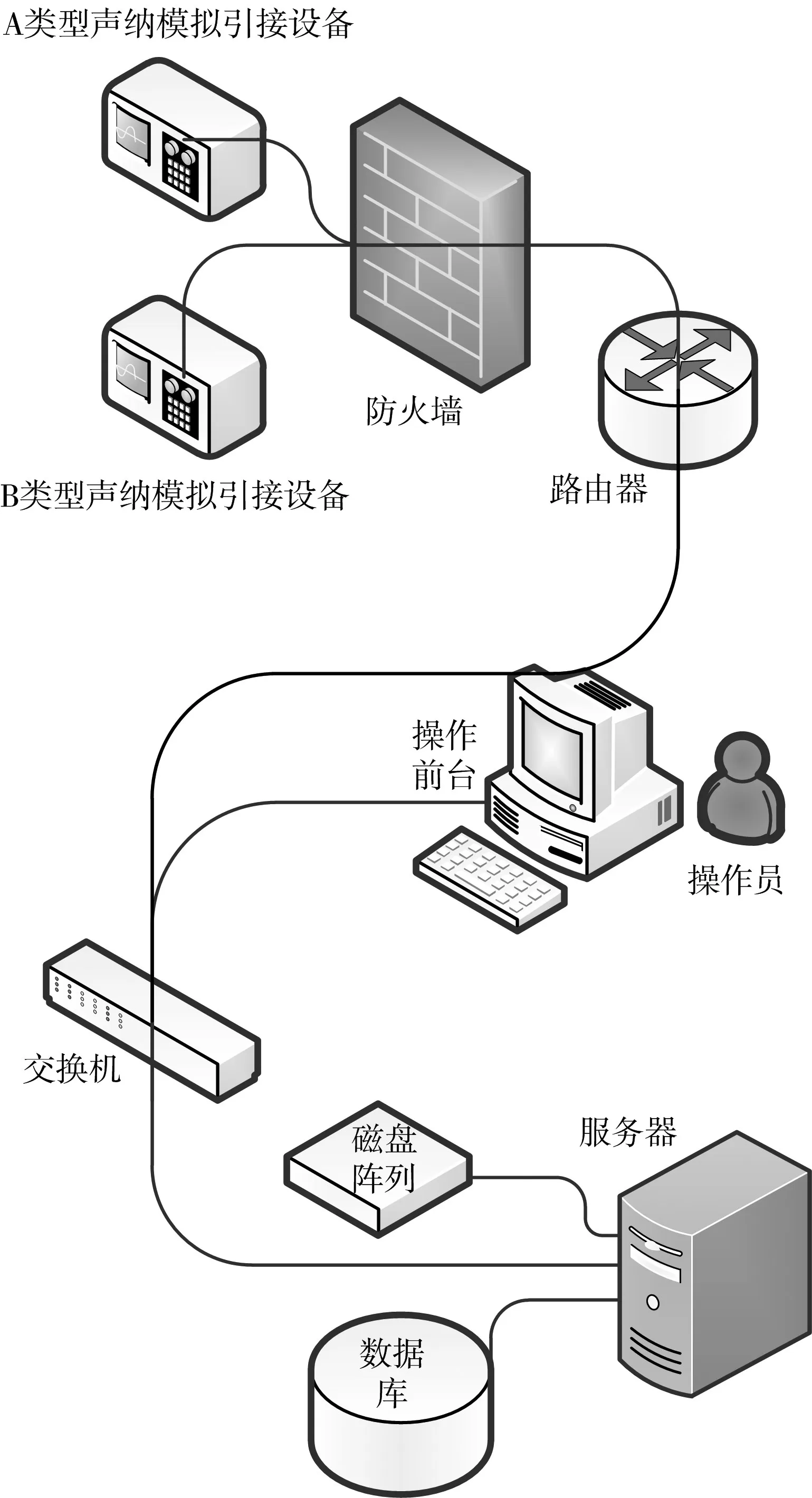
图4 系统部署架构图

图5 系统交互界面示意图
4.3 B类声纳识别
具体实施流程如下:
1)总体上,根据大量收集的数据,依据B类声纳目标的信号特点,剪切出B类目标特征模板,供自动识别判性时使用;
2)人机交互界面发起B类声纳目标识别申请,待识别结束后,获取识别结果B;
3)将识别结果B回显至前台界面,供参考;
4)将比较明确的属性字段,存储进B类目标数据库,作为大数据体模板,长期积累,丰富数据库样本内容。
4.4 关联融合服务
具体实施流程如下:
1)运用目标运动分析(TMA)[4~5]、交叉定位[6]等融合算法,实现目标的自动融合;
2)运用信息接入端日常收集的航迹数据库,结合特定目标,进行目标规律分析;
3)将各种可信的规律及有用信息保存入目标数据库,长期积累,作为融合判性的依据,再发过来丰富数据库样本内容。
4.5 人耳判听分析
人耳判听,有两个特点:其一,必须是比较明确的、常见的、参数确定的目标;其二,必须依赖于有经验的操作员。
因此该功能模块,仅作为一个辅助功能,提供一种特定采样率的噪声或回波数据的监听功能。实施流程如下:
1)该模块具备基本的噪声或回波数据的播放功能;
2)具备噪声或回波数据的采样、截取、分析等编辑功能;
3)编辑结果,可以作为匹配样本,存入数据库,作为大数据体模板,长期积累、丰富数据库内容。
4.6 目标数据维护
目标数据库维护,有两个方面的概念,即收集整理的数据和编辑装订的数据,据此,实施流程如下:
1)依据长期收集的目标信息,充实数据库,作为大数据体样本;
2)依据各类识别手段互相印证而获取的结果,修订充实经收集而来的不完整目标信息的各个属性字段。
4.7 综合判性
综合判性,其实就是运用以上几种识别手段获取的结果,同时考虑水声目标数据的特征冗余[7]的特点,采用基于证据理论的综合判别方法[8~10],再结合操作员的个人经验以及当时的各种情况,综合而得到的结果。最终再通过人工交互界面,更新显示属性和显示结果。
5 结语
本原型系统在实现后,通过模拟仿真系统生成各类大量典型目标信息,提取各类特征样本,进行模板制作,作为大数据匹配的验证依据。经测试,能有效提高可识别性和识别率。
大数据目标特征模板匹配识别技术,目前仅仅在摸索阶段,多源数据融合、模式识别、机器深度学习等技术均未得到大规模成体系的检验[11~13]。虽然国内外已陆续证实该技术能够有效应用于精准的军/民用目标识别和军用战术决策,但大数据目标识别技术本身要彻底实现实用化、普适化,仍需突破诸多关键技术[14~15],主要包括:
1)大数据的实时收集与融合。数据来源复杂,且通信制式、数据格式多样,如何实现快速传输、异构网络数据融合等,都需要进一步研究;
2)实时分析处理。目前针对于大数据样本的目标识别,仅开展于离线数据处理方面,而对于实时分析处理,其可用性、时延等问题,也需要持续优化;
3)在实时收集处理过程中,如何拥有安全稳定的网络传输,做到强大的抗干扰及抗攻击性,也要重点关注。
基于以上原因,本文所提水声目标识别,采用大数据技术提取目标特征,形成匹配模板,也仅限于原型系统实现阶段,除此之外,系统还有以下需要持续改进和研究的地方:
1)大数据建模及大数据样本设定,不尽合理,对于识别成功率及识别速度影响较大,大数据装订流程需要优化;
2)综合识别判情依据准确率不够好,应继续研究融合处理算法;
3)人工交互及干预手段不友好,不能运用好、组合好多方法识别工具;
4)自动化识别处理程度不够,很多处理流程对于人工依赖较大。
总之,基于大数据的水声目标识别,是一个较新的领域,后续将会继续跟踪研究,使系统性能进一步提升。
