基于ET和水量平衡的日光温室实时精准灌溉决策及控制系统
2018-11-23袁寿其齐志明王新坤
顾 哲,袁寿其※,齐志明,王新坤,蔡 彬,郑 珍
基于ET和水量平衡的日光温室实时精准灌溉决策及控制系统
顾 哲1,袁寿其1※,齐志明2,王新坤1,蔡 彬1,郑 珍1
(1. 江苏大学流体机械工程技术研究中心,镇江 212013;2. 加拿大麦吉尔大学生物资源工程系,蒙特利尔 H9X 3V9)
为提高日光温室的灌溉水利用效率,充分发挥现有灌溉决策理论的指导作用,该文构建了基于ET和水量平衡方法的实时精准灌溉决策及控制系统。以句容布戴庄村樱桃番茄温室为试验对象,给出了利用ET和水量平衡方法的灌溉决策实施过程,即当田间蒸发蒸腾总量大于土壤中可供作物利用水分时触发灌溉,灌水量等于自上一次灌溉起蒸散量的总和。采用Java语言开发了灌溉决策软件ETSch,可实现以温室内气象数据为基础对不同地点的灌溉决策项目进行管理;设计了温室精准滴灌系统并研制了基于单片机的灌溉控制器软硬件,通过ETSch软件与控制器的连接,建立了从田间气象信息获取到灌溉决策软件运行,再到灌溉及控制系统的集成化自动精准灌溉模式。试验结果表明,该实时精准灌溉决策及控制系统的平均灌水总量控制平均误差为1.1%,系统运行稳定,节约人工;尽管采用ET和水量平衡方法低估了实际土壤含水率,但总体趋势一致,能实现合理有效的灌溉决策。该研究可为实现灌溉决策和控制系统的集成提供参考,为进一步提高灌溉效果和用水效率提供借鉴。
灌溉;控制;土壤水分;实时精准灌溉;灌溉决策;灌溉控制系统;水量平衡;决策软件
0 引 言
高效节水灌溉工程一直是中国农业发展中的重中之重,在2018年的中央一号文件《关于实施乡村振兴战略的意见》[1]中又给出了建设一批重大高效节水灌溉工程的意见。通过改用喷灌、滴灌等高效灌溉方式虽然提高了作物水分利用效率,但是不合理的灌溉决策会导致灌溉水不能满足作物生长需求或造成土壤深层渗漏甚至径流,带走土壤养分,均不利于作物的生长。良好的灌溉决策方法应在保证作物生长需求的基础上,尽量减少灌溉用水,提高灌溉水利用效率。
在实时灌溉决策方法方面,国际上主要形成了4类方法[2],即基于蒸散量计算和水量平衡的方法、基于土壤水分的方法、基于作物水分的方法和基于模型的方法。其中,基于蒸散量ET和水量平衡的灌溉决策方法[3-4]是一种较为通用且易于实施的方法,美国农业部FAO开发的CROPWAT[5-6]以及近年推出的智能手机软件SmartIrrigation Apps[7-11]均采用基于ET的灌溉决策方法,这种方法也在许多研究中使用[12-15],并应用于控制器中[16-17],形成了多种商用ET灌溉控制器[18],如Toro Intelli-sense、ETwater Smart Controller 100和Weathermatic SL1600等,相比一般的基于时间的灌溉控制器可达到平均43%的节水量[18]。基于土壤水分或作物水分的方法往往需要较多传感器的支持,将增加系统的成本,且对水分含量下限的定义仍需要田间试验来确定。近年来,采用模型的灌溉决策方法逐渐被应用[19-20],Gu等[2,21]提出了基于RZWQM2(Root Zone Water Quality Model 2)模型水分胁迫的灌溉决策方法,测试结果表明,该方法可以较好地保持作物产量并节约用水量最高达约30%[2,21-22],但是需要前期田间试验数据的支持来实现模型的良好校准。
另外,灌溉决策需要与精确灌溉系统相结合,形成精准灌溉决策及控制系统,才能真正体现决策的有效性和灌溉系统的价值。国外在大型喷灌机和变量灌溉方面逐渐形成了灌溉决策与控制系统的集成[23-27],但中国在这方面的发展较为缓慢,集成灌溉决策与控制的智能系统还不多,且较多采用基于土壤含水率测量[28]或模糊控制、专家知识[29-30]的灌溉系统,不利于管理者对灌溉决策过程的理解和精准灌溉决策系统的形成。
为了实现精准灌溉决策,如基于模型的决策方法,对于大多数没有前期试验数据的灌溉地区首先需要一种有效的灌溉决策及控制系统开展灌溉实践,因此,本研究以日光温室灌溉试验地为对象,拟采用基于ET和水量平衡的灌溉决策方法开展灌溉试验,并设计灌溉决策软件和控制系统,从而为初步实现灌溉决策及控制系统的集成提供实例,为实现更精准的灌溉决策方法提供试验数据参考。
1 试验系统设计
试验于2017年在江苏省句容市天王镇戴庄村有机农业产地(119.23°E,31.65°N)的日光温室内进行。该试验地海拔50 m,属亚热带季风性湿润气候,夏季高温多雨,冬季温和少雨。日光温室长44.5 m,宽6.1 m,采用拱形钢架结构,中部高度约3 m,南北走向,覆盖山东清田塑工有限公司生产的聚乙烯流滴耐老化棚膜,室内没有补温和通风设施。温室顶部采用双层膜结构使大棚既能防雨又保持通风,底部卷起0.6 m保持通风,当气温降低至15 ℃左右时放下四周棚膜保温。日光温室土壤质地为粉砂质黏壤土或粉砂质黏土(国际制),土壤质地随深度没有明显变化,地下水埋深约为1 m。
供试番茄品种为千禧樱桃番茄(),属于无限生长型,南北向种植,留5穗果后打顶。温室内共4垄,平均垄间距1.33 m,垄宽0.73 m,平均株间距为0.64 m,由西向东依次为垄1至垄4,记为H1~H4。滴灌带紧挨作物根部放置,一条滴灌带用于一垄作物的灌溉。除灌溉外,温室内作物的其他管理根据当地农民的经验确定。在移栽前施猪粪1次,整个种植期间未施肥,未喷药。樱桃番茄于2017年8月11日移栽,缓苗期采用微喷头灌水3次,约35 mm,滴灌1次,约19 mm,总灌水量54 mm,缓苗10 d后采用滴灌。滴灌时,设置2种灌溉处理,其中H1、H3为亏缺灌溉处理,H2、H4为充分灌溉处理,充分灌溉处理采用基于ET的实时灌溉决策方法得到灌溉时间和灌水量,亏缺灌溉处理的灌溉时间与充分灌溉处理相同,但灌水量是充分处理的80%。作物结果后定期采摘,约每10 d采摘1次,至12月5日夜间温度低于0℃,作物死亡,试验结束。
灌溉决策方法的有效性体现在对土壤水分估计的准确性上,为此,采用土钻法测量了土壤含水率。平均每周采集一次,灌溉后加测1次,在每垄的首部、距首部10、20、30 m处以及尾部分别测量,取土深度为5、10、20、30和40 cm。采用烘干法测量土壤质量含水率。烘干仪设定温度为(105±3) ℃,烘干时间一般为18 h,烘至恒质量;土壤质量测量采用高精度电子秤,量程0~1 000 g,精度0.01 g。取土铝盒直径55 mm,高35 mm。土钻长0.5 m,钻头直径38 mm。土钻法测得的土壤质量含水率根据土壤容重换算成体积含水率。土壤容重采用环刀法测量。
1.1 灌溉决策及控制系统设计
本文采用的灌溉决策及控制系统框架如图1所示。温室内自动气象站采集冠层净辐射和温室内温湿度数据并储存于数据采集器中,通过计算机获取数据采集器的数据并通过本研究开发的ETSch软件进行计算后给出灌溉决策到田间滴灌控制器,最终由滴灌控制器对田间滴灌系统进行控制,实现精准的灌水量自动控制。试验中,个人电脑与数据采集器、滴灌控制器均采用RS232串口实现数据通信。为便于田间灌溉管理,滴灌控制器还增加了手动键盘输入功能。

图1 灌溉决策及控制系统框架
1.2 实时气象测量数据
为计算参考蒸散量ET0,采用自动气象站实时测量日光温室棚内微气象数据,放置于H2距首部30 m处,测量参数包括净辐射、空气温度和湿度。由于日光温室有塑料薄膜遮蔽,降雨量为0,风速也近似为0,因此没有测量降雨和风速。净辐射仪采用Kipp & Zonen公司的NR-LITE2,灵敏度为13.0V/(W·m-2),安装高度为2 m;空气温湿度采用瑞士Rotronic公司的标准温湿度探头HygroClip2,型号为HC2S3,常温下湿度测量精度为±0.8%,温度测量精度为±0.2 ℃,安装高度约1.5 m。上述传感器测量参数通过线缆传输到Campbell公司的CR1000数据采集终端。数据采集终端通过串口与计算机相连,通过配套软件(Campbell_LoggerNet)实现数据下载。自动气象站数据测量频率为1 min,并给出每小时平均值和每日平均值,计算ET0时采用日均数据,为保证当天ET0计算的可靠性并在需要时进行及时的灌溉,当天ET0的计算采用15个以上的每小时数据平均值。
1.3 滴灌系统
图2为温室滴灌系统示意图。该滴灌系统中,潜水泵从位于温室附近的河塘中取水,水流通过钢丝管和UPVC管输送到主管路,依次流经手动球阀、过滤器、流量计、压力表后到达电磁阀,通过控制柜控制电磁阀的开闭即可实现温室内各垄的不同灌溉处理。相同的处理行采用同一个流量计测量总灌水量。
潜水泵额定功率550 W,额定流量6 m3/h,额定扬程9 m;主管路管径40 mm;过滤器采用筛孔尺寸为0.125 mm的Y型叠片式过滤器;流量计量程范围为0.4~8 m3/h,可显示当前流量和总水量,并可输出当前流量对应的4~20 mA电流信号供外部设备读取。压力表量程为100 kPa;电磁阀采用常闭式,由控制柜根据灌水量要求控制相应电磁阀的动作。选用0.1 MPa下标称流量为3 L/h的滴灌带(广州顺绿喷灌设备有限公司),滴灌带管径16 mm,壁厚0.3 mm,孔间距15 cm。滴灌系统工作时,压力表读数约为26 kPa,流量计读数约为0.75 m3/h。

1. 滴灌带 2. 作物 3. 电磁阀 4. 压力表 5. 流量计 6. 过滤器 7. 球阀 8. 潜水泵 9. 河塘
1. Drip tape 2. Crop 3. Solenoid valve 4. Pressure meter 5. Flowmeter 6. Filter 7. Ball valve 8. Submerged pump 9. Pond
注:H1、H3标记第1、3垄亏缺灌溉处理,H2、H4标记第2、4垄充分灌溉处理。
Note: H1 and H3 marked first and third plots with deficit irrigation treatments; H2 and H4 marked second and forth plots with full irrigation treatments.
图2 日光温室滴灌系统布置示意图
Fig.2 Layout of drip irrigation system in solar greenhouse
1.4 滴灌控制器
图3为用于控制电磁阀的电气控制柜及其单片机控制系统。控制柜设置有手动和自动灌溉控制功能。手动控制时,通过控制柜面板的拨动开关(图中未标示)分别控制H1~H4的电磁阀动作。自动控制时,控制柜面板上对应的拨动开关失效,转而由控制柜内部的单片机控制器进行控制。

图3 滴灌控制器
自动灌溉模式下,用户首先通过计算机发送或单片机控制器键盘输入相应灌溉处理下的灌水深度,确认后该控制器将自动开启电磁阀进行灌溉,同时单片机控制器通过读取流量计读数并进行积分计算总灌水量,当相应的灌溉处理的总灌水量达到设定灌水量时,单片机系统控制对应的电磁阀关闭,并记下总灌水时间,当所有灌溉处理完成后,用户即可切断电源,关闭灌溉系统。
单片机控制器中,将输入的灌水深度转换成灌水量时,按垄长44 m垄宽0.6 m计算,即1 cm灌溉深度对应一垄的灌水量为0.264 m3。单片机芯片采用MSP430F169,控制电磁阀动作时首先通过芯片引脚控制4路继电器(继电器模块放置于图3中单片机控制系统的盒体内),4路继电器再分别控制电磁阀动作。流量计的输出信号首先通过2个并联的250 Ω(0.1%精度)电阻转化为0.5~2.5 V电压,然后由单片机自带的模数转化器(A/D)采样,实现读取当前流量的功能。单片机读取流量后以1 s的时间间隔进行积分运算得到单次灌溉的累积灌水量,并当该值达到设定灌水量时停止灌溉。
图4为单片机控制器的程序流程图,其中,校准流量读数时,同时检测了流量计读数是否正常,避免因流量计未开启或灌溉完成后流量瞬时低于0时计算错误,当流量计未通电时控制器将关闭阀门并显示错误,灌溉完成后,流量计读数出现负值则按流量为零计算。灌溉完成后,时间计数器不再增加,因此显示器(LCD12864)显示的灌溉时间停止,总灌水量为累积计算值,当前流量为0。采用AD中断对流量信号进行采样,每秒内中断30次进行采样后取平均值作为这一秒内的流量平均值并用于积分计算。

图4 单片机控制器程序流程图
2 基于ET的实时灌溉决策方法及软件
2.1 灌溉决策方法
采用基于ET和水量平衡的方法进行灌溉决策。充分灌溉处理的灌水时间和灌水量根据Huffman[4]中总结的基于ET的灌溉方案进行决策,即当田间蒸发蒸腾总量大于土壤中可供作物利用水分(readily available water, RAW)时触发灌溉,灌水量等于自上一次灌溉起蒸散量的总和。灌溉决策的具体实施步骤为:
1)根据气象测量参数计算参考蒸散量ET0
由于日光温室中风速几乎为0,因此,不适宜采用FAO推荐的Penman-Monteith (PM)公式,而采用PM方程在日光温室中的修正公式[31]

式(1)中相关参数根据Huffman[4]计算:



式中ET0i为充分灌溉下第天的参考蒸散量,cm/d;∆为饱和蒸气压曲线斜率,kPa/℃;R为作物冠层净辐射,MJ/(m2∙d);为土壤热通量密度,MJ/(m2∙d),相比R通常很小,可忽略;为干湿表常数,取0.067 kPa/℃;为地表1.5~2.5 m高度处每日平均气温,℃;max/min为地表1.5~2.5 m高度处每日最高/最低气温,℃;e为地表1.5~2.5 m高度处平均饱和蒸气压,kPa;e为地表1.5~2.5 m高度处平均实际蒸气压,kPa;RHmax/min为地表1.5~2.5 m高度处每日最高/最低相对湿度,%。
2)以天为单位,按式(6)计算ETc
作物系数c参照FAO推荐值并根据作物生长阶段进行设定[3]。将樱桃番茄生长发育划分为4个阶段:苗期(8月11日—8月31日)、开花坐果期(9月1日—10月9日,)盛果期(10月10日—11月14日)、盛果后期(11月15日—12月5日),4个阶段依次对应天数为21、39、36和21 d,其中,盛果后期因霜冻致作物死亡,提前结束。在苗期、盛果期和最后设定的作物参数分别为0.7、1.05和0.8[3]。

式中ETci为充分灌溉下第天的作物蒸散量,cm/d;c为作物系数,无量纲。
3)计算土壤水分亏缺[4]

式中D为第天的土壤水分亏缺值,cm,种植当天(8月11日)为第1天,默认0= 0;ETci为第天作物蒸散量,cm。
4)计算土壤允许水分亏缺值RAW[4](cm)



表1 允许亏缺比例(MAD)随最大日蒸散量变化的建议值[4]
5)比较RAW和D,当D> RAW时触发灌溉,灌水量设置为D。
6)若第天进行了灌溉,令D=D-1= 0,否则令D-1=D,以d为单位,重复上述步骤,直至作物收获。
至此,结合自动气象站测量的气象数据,FAO[3]推荐的作物系数,Huffman[4]给出的MAD以及试验前期检测的温室内土壤在田持和凋萎点时的含水率,即可按上述步骤完成灌溉决策。
2.2 实时灌溉决策软件ETSch
采用Java语言开发了基于ET的实时灌溉决策软件ETSch,采用项目式管理结构,可实现多个地点的实时灌溉决策管理。软件运行前,需要下载最新的气象数据。软件运行时,读取上一次保存的结果数据,更新上次计算中最后一天的ET0,并按照上述灌溉决策方法逐日进行计算,直至当前日。计算结果以图表形式展现,如图5所示,在该界面中,根据用户需要,可以修改ET0数据(主要是数据缺失时)、灌溉数据、MAD、RD、田持含水率和凋萎点含水率。表格参数修改后将自动重新计算并更新灌溉计划示意图。软件界面表格中,c、ETc、D和RAW不可改,其中c值根据软件中设定的c曲线(图6)自动获取,ETc、D和RAW均采用上述公式计算获得。

图5 ETSch软件灌溉计划界面

图6 灌溉决策软件中作物系数Kc及根系深度RD设定值
ETSch软件中还可以设置项目描述,试验地位置信息,选择日、小时气象数据文件,种植和收获日期等。在首次进行该作物的灌溉试验时,根据实际情况对c曲线和根系深度进行了适时的调整。出于田间管理的需要,如为了方便在垄上插竹竿以防止作物倒伏,需要增加灌水使土壤松软,此时在软件的灌溉计划界面表格中直接修改对应日期的灌水量,软件将以实际灌溉量进行计算。
3 系统性能与分析
以2017年试验结果为例,对上述开发的基于ET的灌溉决策及控制系统进行分析,从滴灌控制系统的灌水量控制精度、灌溉决策方法的有效性方面进行评价。通过比较设定灌水量和实际测量灌水量评价控制系统的精度;通过比较估计的土壤含水率和实际土壤含水率评价灌溉决策方法的有效性,即当估计的土壤含水率与实际情况越接近,则说明这种方法能较准确地反映土壤含水率的变化,从而有效地实现对土壤含水率的控制,保持作物生长的水量需求,实现较好的灌溉决策。
3.1 滴灌控制系统精度
流量采样的精度和灌水量计算的精度通过前期校准,平均误差控制在1%以内。尽管如此,由于关闭电磁阀后水流的滞后作用,实际流量计测定的灌水量和控制器设定值之间仍存在一些误差,如图7所示。除图中标记的初次灌水量存在近10%的误差外,其他灌溉事件中的灌水量误差均较小。流量采样校准后,实际灌水量比设定值平均增大约1.1%,总体上系统的流量控制精度较高。

图7 设定灌水量与实际灌水量对比
3.2 灌溉决策结果
如图8为采用上述基于ET的灌溉决策方法下,温室灌溉试验的决策过程及实际田间试验灌溉方案。

图8 日光温室基于ET的灌溉决策过程与结果
由图8可知,当估计的土壤含水率降至MAD定义的土壤含水率下限时触发灌溉,每次灌溉均灌至田持。初始土壤含水率设置为田持,超过田持的部分视为渗漏量。试验前期由于灌溉系统调试和田间管理等因素,有些与决策方法不一致,试验中期由于管理需要,有时当估计的土壤含水率接近MAD定义的下限时提前进行了灌溉。最后一次灌溉考虑到果实采摘和气温、水温较低的因素,延迟并减少了灌水量。
3.3 灌溉决策方法有效性
灌溉过程中采用ET计算和水量平衡估计的土壤含水率与实测值对比如图9所示。其中实测的土壤含水率计算时,首先计算充分处理下(H2、H4)在根系深度内每个土壤层体积含水率的平均值(多个测量点取平均值),再计算根系深度内各土壤层的加权平均作为当前根系深度内的实测土壤含水率。
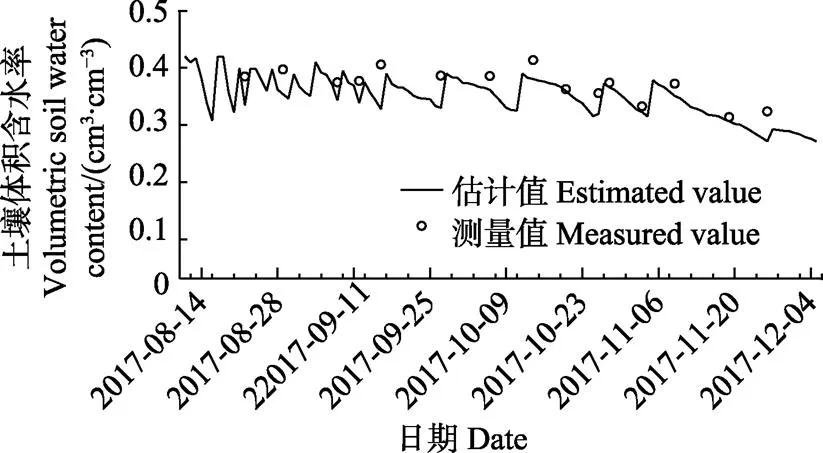
图9 土壤含水率估计值与测量值对比
由图9可知,估计值普遍比实测值小,但总体上变化趋势一致。数据统计结果显示,估计值相对于实测值的百分比偏差为-9.1%,相对根均方误差rRMSE为10.8%,相关系数为0.7,从模型角度来说,采用ET和水量平衡计算估计的土壤含水率效果还不够理想,但从灌溉决策角度来说,在缺乏前期试验数据的基础上,采用基于ET和水量平衡计算能获得较为可靠的土壤含水率变化,并以此进行灌溉决策,使得实际土壤含水率保持在合理范围内,既不产生明显径流和深层渗漏,也能满足作物的水分需求,保证了灌溉水的有效利用,因此,该方法在灌溉决策上的应用是合理有效的。
由于土壤含水率估计值是在田持基础上减去土壤水分亏缺(D)并换算到根系层含水率得到的,因此其估计的准确性不仅依赖于对田持测量的准确性,还受到蒸散量计算准确性的影响,此外,土壤含水率实测值也存在误差,受到日光温室棚外降雨通过土壤渗透的影响,也会导致测量值偏大。总之,在复杂的田间环境下,采用基于ET和水量平衡计算的灌溉决策方法尽管在土壤含水率的估计上存在一定的误差,但仍能够实现较为可靠有效的灌溉决策。
4 讨 论
虽然基于ET和水量平衡计算的灌溉决策方法没有直接考虑作物的实际需水量,但是通过在不同蒸散速率下MAD值的调整,可以将作物根系土壤含水率控制在适宜生长的范围内。针对不同种类的作物,Huffman[4]也同样给出了MAD在不同蒸散速率下的标准值,同时,FAO56[3]也给出了不同作物的作物系数曲线,因此,基于ET和水量平衡的灌溉决策方法也能适用于不同种类的作物,具有较广泛的实用性。由于这种方法在估计土壤含水率方面的可靠性较好,相比采用传感器测量的方法减少了成本,结合笔者开发的软件ETSch,可以实现快速的决策。
本文提出的灌溉决策及控制系统也同样适用于大田灌溉实践中,即仍然由田间气象数据采集、基于ET和水量平衡的灌溉决策方法、以及自动灌溉控制系统组成,但在具体实施细节上应根据实际情况有所不同,例如,应增加风速和降雨量的测量,用于ET和水量平衡的计算;应采用FAO56推荐的PM公式计算ET0;灌溉系统管网及控制系统应做相应调整;以及在数据采集、灌溉决策软件和自动控制器之间采用远程通讯等。
由于本文旨在提出一种灌溉决策及控制系统,且由于缺乏前期试验数据和田间测量数据,采用了基于ET和水量平衡计算的灌溉决策方法,这种方法虽然对作物根系土壤含水率的估计准确性有限,但是能整体上反映土壤含水率的变化并保持土壤含水率在适宜作物生长的范围内,根据FAO56[3]给出的作物系数曲线和Huffman[4]给出的MAD建议值,可以实现对不同作物的灌溉决策。由于采用灌溉深度进行灌溉决策,采用ET和水量平衡计算后给出的灌溉深度可以根据灌溉系统的规模转换为灌水量,因此,在本文采用的基于ET和水量平衡的灌溉决策方法中不反映温室的规模对灌溉深度的影响,温室大小对灌溉深度的潜在影响可在今后的研究中考虑。随着这种灌溉决策方法及其控制系统的应用,可以获取不同作物和不同大小温室的灌溉数据,从而可以采用人工神经网络算法和农业系统模型等对灌溉决策进行优化,进一步提高灌溉水的利用率。
5 结 论
本文以实现精准灌溉决策及控制系统为目标,通过ET和水量平衡计算进行灌溉决策,构建了实时精准灌溉决策及控制系统,实现了灌溉过程的自动化,对灌溉科学和应用的发展具有参考意义。
1)构建了基于ET和水量平衡的灌溉决策及控制系统,并以句容市戴庄村日光温室樱桃番茄为试验对象开展了灌溉试验。通过开发灌溉决策软件ETSch实现了基于ET的灌溉决策方法,设计了温室滴灌系统和滴灌控制系统,并建立其与ETSch的集成,形成了灌溉决策与控制的集成化自动精准灌溉模式,实现了科学的准确时间和精确灌水量的精准灌溉决策。
2)试验结果表明:构建的精准灌溉系统在流量控制上的平均误差为1.1%。根据ET和水量平衡计算估计的土壤含水率尽管与实际含水率存在偏差,但能有效地反应实际含水率的变化并作出合理有效的灌溉决策。因此,在缺乏前期试验数据的基础上,采用基于ET和水量平衡计算进行灌溉决策不失为一种较好的方法。
[1] 新华社. 中共中央国务院关于实施乡村振兴战略的意见[J]. 中国合作经济,2018(2):18—27.
[2] Gu Zhe, Qi Zhiming, Ma Liwang, et al. Development of an irrigation scheduling software based on model predicted crop water stress[J]. Computers and Electronics in Agriculture, 2017, 143: 208-221.
[3] Allen R G, Pereira L S, Raes D, et al. FAO Irrigation and Drainage Paper No. 56: Crop Evapotranspiration-Guidelines for Computing Crop Water Requirements[M]. Rome: FAO, 1998.
[4] Huffman R L. Soil and Water Conservation Engineering (7th Edition)[M]. Michigan: American Society of Agricultural and Biological Engineers, 2013.
[5] Smith M. FAO Irrigation and Drainage Paper No. 46: CROPWAT: A Computer Program for Irrigation Planning and Management[M]. Rome: FAO, 1992.
[6] Savva A P, Frenken K. Crop Water Requirements and Irrigation Scheduling[M]. Harare: FAO Sub-Regional Office for East and Southern Africa, 2002.
[7] Vellidis G, Liakos V, Perry C, et al. A smartphone app for scheduling irrigation on cotton[C]// S. Boyd, M. Huffman and B. Robertson. Proceedings of the 2014 Beltwide Cotton Conference. New Orleans, LA: National Cotton Council, Memphis, TN, 2014: 15551.
[8] Vellidis G, Liakos V, Tucker M, et al. A Smartphone App for Precision Irrigation Scheduling in Cotton[M]// Stafford J V. Precision Agriculture'15. Wageningen, The Netherlands: Wageningen Academic Publishers, 2015: 701-708.
[9] Vellidis G, Liakos V, Perry C, et al. Irrigation scheduling for cotton using soil moisture sensors, smartphone apps, and traditional methods[C]// Proceedings of the 2016 Beltwide Cotton Conference. New Orleans, LA: National Cotton Council Memphis, TN, 2016: 772-780.
[10] Vellidis G, Liakos V, Andreis J H, et al. Development and assessment of a smartphone application for irrigation scheduling in cotton[J]. Computers and Electronics in Agriculture, 2016, 127: 249-259.
[11] Migliaccio K W, Morgan K T, Vellidis G, et al. Smartphone apps for irrigation scheduling[J]. Transactions of the ASABE, 2016, 59(1): 291-301.
[12] Thysen I, Detlefsen N K. Online decision support for irrigation for farmers[J]. Agricultural Water Management, 2006, 86(3): 269-276.
[13] Chauhan Y S, Wright G C, Holzworth D, et al. Aquaman: a web-based decision support system for irrigation scheduling in peanuts[J]. Irrigation Science, 2013, 31(3): 271-283.
[14] Bartlett A C, Andales A A, Arabi M, et al. A smartphone app to extend use of a cloud-based irrigation scheduling tool[J]. Computers and Electronics in Agriculture, 2015, 111: 127-130.
[15] Perea R G, García I F, Arroyo M M, et al. Multiplatform application for precision irrigation scheduling in strawberries[J]. Agricultural Water Management, 2017, 183: 194-201.
[16] Dukes M D. Water conservation potential of landscape irrigation smart controllers[J]. Transactions of the ASABE, 2012, 55(2): 563-569.
[17] Devitt D A, Carstensen K, Morris R L. Residential water savings associated with satellite-based ET irrigation controllers[J]. Journal of Irrigation and Drainage Engineering, 2008, 134(1): 74-82.
[18] Davis S L, Dukes M D, Miller G L. Landscape irrigation by evapotranspiration-based irrigation controllers under dry conditions in Southwest Florida[J]. Agricultural Water Management, 2009, 96(12): 1828-1836.
[19] Maier N, Dietrich J. Using SWAT for strategic planning of basin scale irrigation control policies: A case study from a humid region in Northern Germany[J]. Water Resources Management, 2016, 30(9): 3285-3298.
[20] Linker R, Ioslovich I, Sylaios G, et al. Optimal model-based deficit irrigation scheduling using AquaCrop: A simulation study with cotton, potato and tomato[J]. Agricultural Water Management, 2016, 163: 236-243.
[21] Gu Zhe, Qi Zhiming, Ma Liwang, et al. Water stress based deficit irrigation scheduling using RZWQM2 model for maize in Colorado[C]. 2017 ASABE Annual International Meeting. St. Joseph, MI.: ASABE, 2017: paper No. 1701226.
[22] Liu Che, Qi Zhiming, Gu Zhe, et al. Optimizing irrigation rates for cotton production in an extremely arid area using RZWQM2 simulated water stress[J]. Transactions of the ASABE, 2017, 60(6): 2041-2052.
[23] Han Y J, Khalilian A, Owino T O, et al. Development of Clemson variable-rate lateral irrigation system[J]. Computers and Electronics in Agriculture, 2009, 68(1): 108-113.
[24] Peters R T, Evett S R. Automation of a center pivot using the temperature-time-threshold method of irrigation scheduling[J]. Journal of Irrigation and Drainage Engineering, 2008, 134(3): 286-291.
[25] McCarthy A, Hancock N, Raine S. Holistic control system design for large mobile irrigation machines[M]// Billingsley J, Brett P. Machine Vision and Mechatronics in Practice. Berlin, Heidelberg: Springer, 2015: 177-184.
[26] Liakos V, Vellidis G, Tucker M, et al. A decision support tool for managing precision irrigation with center pivots[M]// Stafford J V. Precision Agriculture'15. Wageningen, The Netherlands: Wageningen Academic Publishers, 2015: 713-720.
[27] Vellidis G, Liakos V, Porter W, et al. A dynamic variable rate irrigation control system[C]// Proceedings of the 13thInternational Conference on Precision Agriculture, St. Louis, Missouri: Academic Publishers, 2016.
[28] 张伟,何勇,裘正军,等. 基于无线传感网络与模糊控制的精细灌溉系统设计[J]. 农业工程学报,2009,25(2): 7-12. Zhang Wei, He Yong, Qiu Zhengjun, et al. Design of precision irrigation system based on wireless sensor network and fuzzy control[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(2): 7-12. (in Chinese with English abstract)
[29] 裘正军,童晓星,沈杰辉,等. 基于模糊控制与虚拟仪器的灌溉决策系统研究[J]. 农业工程学报,2007,23(8): 165-169. Qiu Zhengjun, Tong Xiaoxing, Shen Jiehui, et al. Irrigation decision-making system based on the fuzzy-control theory and virtual instrument[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(8): 165-169. (in Chinese with English abstract)
[30] 余国雄,王卫星,谢家兴,等. 基于物联网的荔枝园信息获取与智能灌溉专家决策系统[J]. 农业工程学报,2016,32(20):144-152. Yu Guoxiong, Wang Weixing, Xie Jiaxing, et al. Information acquisition and expert decision system in litchi orchard based on internet of things[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(20): 144-152. (in Chinese with English abstract)
[31] 王健,蔡焕杰,李红星,等. 日光温室作物蒸发蒸腾量的计算方法研究及其评价[J]. 灌溉排水学报,2006,25(6):11-14. Wang Jian, Cai Huanjie, Li Hongxing, et al. Study and evaluation of the calculation methods of reference crop evapotranspiration in solar-heated greenhouse[J]. Journal of Irrigation & Drainage, 2006, 25(6): 11-14. (in Chinese with English abstract)
Real-time precise irrigation scheduling and control system in solar greenhouse based on ET and water balance
Gu Zhe1, Yuan Shouqi1※, Qi Zhiming2, Wang Xinkun1, Cai Bin1, Zheng Zhen1
(1.212013,; 2.H9X 3V9,)
China is experiencing critical water scarce in agricultural production, and to improve irrigation water use efficiency has been the priority of agriculture development for years. Real-time irrigation scheduling, as well as its integration with irrigation control system, should be paid more attention other than the solely use of sprinkler and drip irrigation systems to improve irrigation water use efficiency in Chinese irrigation community. The evapotranspiration(ET) and water balance (ET-WB) method was applied in this paper to schedule irrigations in a solar greenhouse for cherry tomato in Jurong City in Jiangsu Province. A modified reference ET equation for solar greenhouse was used, and FAO56 suggested initial parameters were referenced to calculate crop evapotranspiration (ETc). Irrigations were triggered in a daily scale when accumulated crop evapotranspiration exceeded readily available water (RAW) across the root depth, which was defined by management allowable depletion (MAD) suggested by Huffman et al.(2013). Then an irrigation event was applied to replenish the soil to field capacity. A user-friendly irrigation scheduling software, namely ETSch, was developed using Java on a laptop, to facilitate managers with calculations involved in ET-WB method. The ETSch calculated ET using meteorological data measured from a field station in greenhouse, and outputed the accumulated ETcand RAW, as well as the irrigation decision on that day. Once an irrigation was triggered, ETSch would send a control signal through a serial connection to the irrigation control system, which was designed using a single-chip microcomputer (SCM) MSP430F169. The SCM system controlled the irrigation amount of the drip irrigation system arranged for each irrigation treatment. Once received an irrigation command, the SCM system would open the corresponding valves and read the flow from a flowmeter. The total water amount would be calculated in the SCM through an integration of flow and stops irrigation when it reached the scheduled amount. Both hardware and software of the SCM control system were detailly designed and developed. The experiment result showed that the irrigation control system worked well after flow correction, with an average error of only 1.1% between set and actual irrigation amount . The scheduled irrigations avoided the occurrence of over-high or low soil water content, and maintained crop water requirement over the crop season, though with an averagely 9.1% underestimate of soil moisture. The estimated soil moisture under ET-WB method showed a consistent change with measured values generally, which proved the efficiency of the developed irrigation scheduling and control system. The underestimate of soil moisture would probably be caused by the error of soil property settings and lateral flow from outside greenhouse with much rainfall. To conclude, a real-time precise irrigation scheduling and control system was developed for greenhouse planted cherry tomato based on ET-WB method, including a laptop-based scheduling software and an SCM-based precise controller. The framework of irrigation scheduling and control system could be an example of further smart irrigation systems, and the data collected could be used for agricultural models calibration and benefit the improvement of irrigation scheduling efficiency. To improve the feasibility of such real-time precise irrigation scheduling and control system for field-scale applications, remote connections should be built for data collection system, irrigation scheduling system and irrigation control system.
irrigation; control; soil moisture; real-time precise irrigation; irrigation scheduling; irrigation control system; water balance; irrigation scheduling software
顾 哲,袁寿其,齐志明,王新坤,蔡 彬,郑 珍. 基于ET和水量平衡的日光温室实时精准灌溉决策及控制系统[J]. 农业工程学报,2018,34(23):101-108. doi:10.11975/j.issn.1002-6819.2018.23.012 http://www.tcsae.org
Gu Zhe, Yuan Shouqi, Qi Zhiming, Wang Xinkun, Cai Bin, Zheng Zhen. Real-time precise irrigation scheduling and control system in solar greenhouse based on ET and water balance[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(23): 101-108. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.23.012 http://www.tcsae.org
2018-04-27
2018-09-26
十三五国家重点研发计划(2016YFC0400202)
顾哲,博士生,主要从事农业灌溉决策及控制系统智能化研究。Email:zhegu2017@163.com
袁寿其,研究员,博士,博士生导师,从事节水灌溉装备及系统研究。Email:shouqiy@ujs.edu.cn
10.11975/j.issn.1002-6819.2018.23.012
S274
A
1002-6819(2018)-23-0101-08
