叶轮旋转式葡萄藤埋土单边清除机研制
2018-11-23徐丽明邢洁洁袁全春于畅畅段壮壮
马 帅,徐丽明,邢洁洁,袁全春,于畅畅,段壮壮,陈 晨,曾 鉴
叶轮旋转式葡萄藤埋土单边清除机研制
马 帅,徐丽明※,邢洁洁,袁全春,于畅畅,段壮壮,陈 晨,曾 鉴
(中国农业大学工学院,北京 100083)
针对目前春季中国北方葡萄种植主产区人工进行葡萄藤清土作业效率低、机械化程度低等问题,该文设计了一种适应于单边清土的叶轮旋转式葡萄藤清土机,主要由机架、刮土部件、叶轮部件和平土搅龙部件组成。刮土部件和叶轮部件能够分别将葡萄藤上方和侧面土壤清除,平土搅龙部件能够将清除的土壤进一步向行间输送并使其均匀地平铺在葡萄行正中间。以机器前进速度、叶轮转速和搅龙转速为因素,以清土中心距为指标,在离散元软件EDEM中对葡萄藤清土机作业进行仿真试验,得到最佳工作参数:前进速度1.2 m/s、叶轮转速420 r/min、搅龙转速300 r/min,此时清土中心距为44 mm。加工物理样机并进行田间试验,田间试验结果与仿真结果基本一致,两者清土中心距的相对误差约为15%,满足葡萄藤清土机单边清土的作业要求。该研究可为后续其他类型葡萄藤清土机的研制提供参考。
机械化;设计;优化;葡萄藤;清土机;EDEM
0 引 言
葡萄是中国主要的水果之一,已在新疆、山东、河北、京津地区、辽宁、山西、吉林和河南等31个省(市、自治区)种植,以鲜食为主,其次作为酿酒原料和制干[1]。近年来,葡萄产业随着中国农业产业结构的调整而迅速发展[2],葡萄种植面积与产量逐年上升,2016年,葡萄种植面积达到84.7万hm2,比2015年增加1.7万hm2 [3]。由于中国北方葡萄种植主产区气候寒冷干燥,葡萄藤会遭受早晚霜冻等周期性的冻害,每当冬季来临之际,为了避免葡萄藤出现风干或冻伤现象,要对葡萄藤采取适当保护措施来保证其安全过冬,一般将葡萄藤放倒之后用土掩埋起来,待冬季结束之后将土清除干净[4],故相比国外,中国葡萄种植需要额外2项作业环节:对葡萄藤在冬季进行埋土防寒和在春季进行清土上架,仅春季清土上架环节的劳动力成本就占葡萄生产管理总成本的1/5左右[5]。此外,春季清土作业季节性强[6],工作量大,劳动强度高,作业效率低,人工成本高,这不仅制约了葡萄产业化的发展,而且降低了葡萄种植户的收入[7],因此,研制相关机械对葡萄藤进行清土作业具有十分重要的意义。
在国外,葡萄产区主要集中在温带及亚热带地区,如法国、德国、美国等国家和地区,由于其自身处于地中海气候的优势,葡萄产区冬季温暖湿润,葡萄藤不会冻伤,不需要经过冬季埋藤以及春季起藤工序,从而在这方面的研究较少,故未见有关葡萄藤清土机方面的文献资料[4]。在国内,近年来对葡萄藤清土机的研究取得了一些研究成果,如刘芳建等[8]研制了一种带避障功能的葡萄藤扒土机,主要包括机架、扒土部件和避障系统等,工作时,通过伸缩油缸控制扒土部件,使其避开葡萄藤支架,该机器出土量大、避障效果好,但由于没有独立的液压系统,机器不能长时间连续作业;王志强等[5]研制了一种前置式葡萄藤清土机,该机器以拖拉机为动力源,通过动力输入轴与拖拉机动力输出轴连接,动力一路传递给平地搅龙,平地搅龙将葡萄藤埋土均匀摊铺到行间,同时另一路动力驱动清土搅龙工作,在作业过程中,能够避开葡萄藤支架,此机器清土效率较高,对葡萄藤产生机械损伤小,但该机器前后长度大,掉头困难;刘松[9]设计研发了一种葡萄藤清土机,该机器以拖拉机为主要动力来源,3点后悬挂式连接,对清土的葡萄藤要求在冬季埋藤过程中,在捆绑好的葡萄藤上层铺设一条彩条布,工作时,机器上部清土搅龙将把彩条布上的土拉拽下来,并经过镂空护栏孔落下,下部搅龙将清理下来的土输送到葡萄行间,并将土壤整理齐平。该清土机作业速度快、质量高,能够最大程度上降低葡萄藤受到机械损伤,但结构相对复杂,且埋藤时需铺设彩条布;曾保宁等[10]研制了一种悬挂式葡萄藤清土机,该机器中两侧铲土犁、刮土板为主要工作机构,在拖拉机的牵引下前进,能够进行双边清土作业,此机器结构简单、设计合理、造价较低,但对葡萄种植行距和拖拉机手驾驶水平要求高,而且葡萄藤垄中间的埋土不能有效清除。除此之外,还有一些葡萄种植户自己设计加工的刮土板式葡萄藤清土机。总体上,葡萄藤清土机的研究都还在试制和试验阶段,清土作业效果有待提高。近年来,随着计算机技术的发展,离散元法(discrete element method,DEM)及其仿真软件在农业工程领域得到了广泛应用[11-16],为分析机具与土壤相互作用的微观及宏观变化规律、优化相关部件作业性能提供了良好的平台与手段[17]。
针对上述问题,本文结合北方地区葡萄藤单边清土的农艺要求,设计了一种叶轮旋转式葡萄藤埋土单边清除机(下文简称葡萄藤清土机),对其工作原理进行分析,在EDEM软件中通过仿真试验优化机器最佳工作参数组合,并进行田间试验检测机器作业性能,以期为葡萄藤清土作业提供一种切实可用的机械,为后续其他类型葡萄藤清土机的研制提供参考。
1 整机结构与工作原理
由于各个地区具体的地理环境不同,葡萄种植方式和种植行距也不同,故冬季葡萄藤埋土方式、埋土厚度和埋土位置存在差异,因此,采用机械化清土作业应当规范葡萄藤的埋土过程。本文以行距在2.5~3 m之间的篱架式单边埋土葡萄藤为作业对象,即入冬前将修剪后的葡萄藤压倒在水泥柱的一侧,用土壤覆盖,形成截面形状近似为等腰梯形的土垄[9,18],如图1所示。根据前期实地调研,一般北方地区冬季埋藤后形成的土垄上底宽300 mm≤≤400 mm、下底宽800 mm≤≤1 100 mm、总高度300 mm≤≤350 mm,葡萄藤上方埋土厚度120 mm≤≤180 mm。据此,本文选择葡萄藤埋土之后的土垄截面尺寸上底宽为400 mm,下底宽为900 mm,埋土总高度为300 mm,葡萄藤上埋土厚度为160 mm。
在春季对葡萄藤进行机械化清土作业时,需将葡萄藤上方和侧面的土壤清除,使埋在土壤里的葡萄藤显露出来,同时,需将清除的土壤均匀地平铺在葡萄行正中间,以便当年冬季葡萄藤埋土的再次使用和后期植保机械在葡萄行间的行走作业,以此为目标,本文设计了一种适用于葡萄藤单边清土作业的叶轮旋转式清土机。
1.1 整机结构
叶轮旋转式葡萄藤清土机主要由机架、刮土部件、叶轮部件、平土搅龙部件、动力传动部件和限深轮等组成,以拖拉机为动力源,其整机结构如图2所示。其中刮土部件、叶轮部件和平土搅龙部件为机器主要清土作业部件,从前到后、从左到右依次安装在机架上,为了进行清土作业时不漏除葡萄藤上的埋土,刮土部件的底端和左侧分别与叶轮部件的顶端和右侧有一定距离的重叠,搅龙部件的右侧与叶轮部件的左侧也有一定距离的重叠,重叠部位的尺寸如图2b所示,通过这3个部件的配合作业,可将葡萄藤上方和远离水泥柱一侧土壤清除,并使其均匀地平铺到葡萄行正中间。3个限深轮分别安装在机架的前方、后方和右侧,在构成稳定3点支撑的同时,配合拖拉机的液压后悬挂装置,调节机器在作业过程中距离地面的高度,从而更好的完成葡萄藤的清土作业。
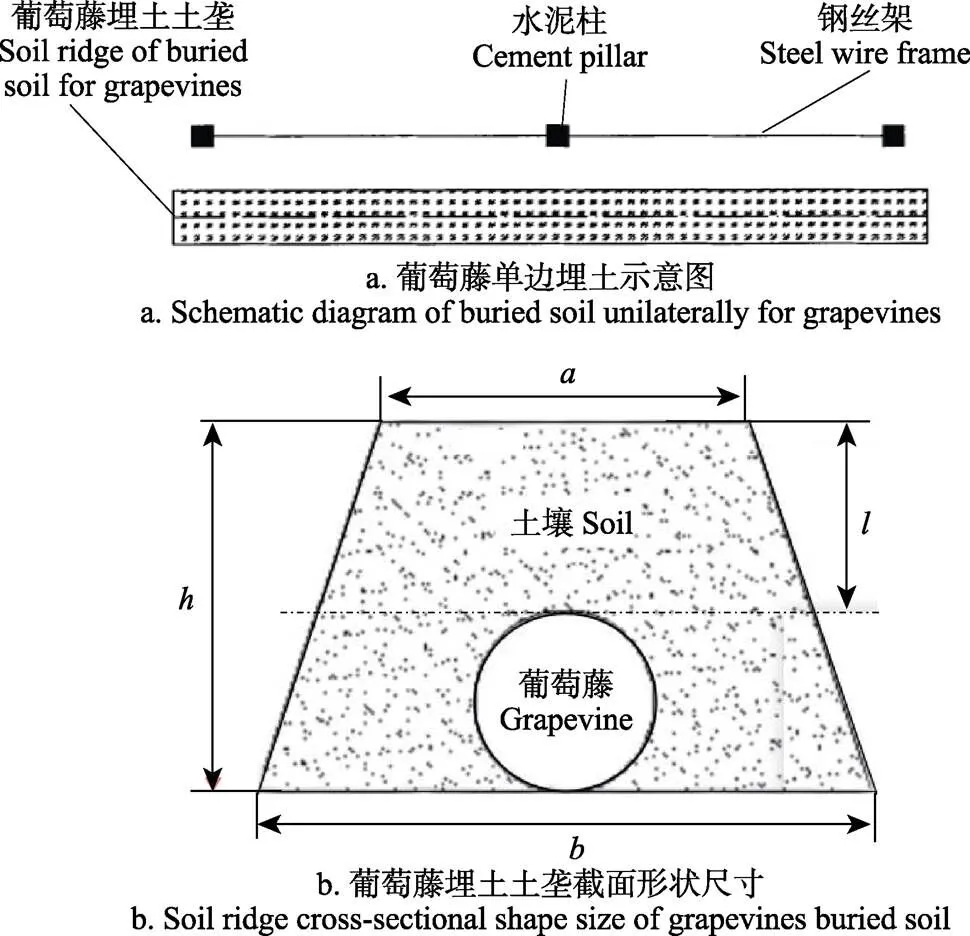
注:a为土垄上底宽,mm;b为土垄下底宽,mm;h为埋土总高度,mm;l为葡萄藤上方的埋土厚度,mm。
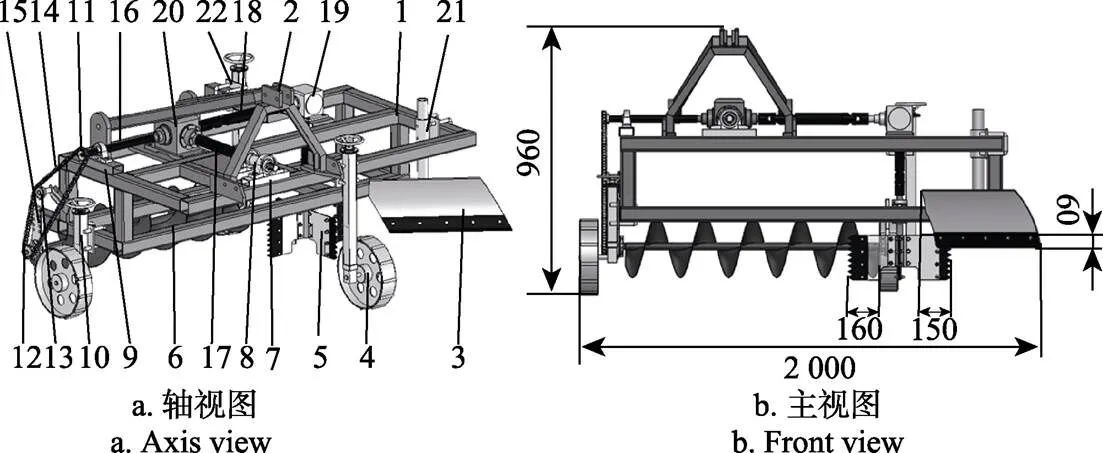
1. 机架 2. 三点悬挂架 3. 刮土板部件 4. 限深轮1 5. 叶轮部件 6. 搅龙部件 7. 中间传动轴支撑架 8. 中间传动轴 9. 链轮传动轴支撑架 10. 限深轮2 11. 主动链轮 12. 从动链轮 13. 张紧轮 14. 链条15. 搅龙支撑架 16. 链轮传动轴 17. 万向节连轴器1 18. 万向节连轴器2 19. 换向器 20. 变速箱 21. 刮土板支架 22. 限深轮3
1. Frame 2. Three point head stock 3. Soil scraper parts 4. Depth wheel 1 5. Impeller parts 6. Screw shaft parts 7. Middle drive shaft support frame 8. Middle drive shaft 9. Sprocket drive shaft support frame 10. Depth wheel 2 11. Active sprocket 12. Driven sprocket 13. Tensioning sprocket 14. Chain 15. Support frame of screw shaft 16. Sprocket drive shaft 17. Universal joint transmission shaft 1 18. Universal joint transmission shaft2 19. Reversing device 20. Gearbox 21. Soil scraper bracket 22. Depth wheel 3
注:主视图中为了清楚的表示搅龙部件的右侧与叶轮部件的左侧相重叠的尺寸,隐藏了限深轮1。
Note: In the front view, the depth wheel 1 is hidden in order to clearly show the size of the right side of the screw shaft overlapping the left side of the impeller parts.
图2 叶轮旋转式葡萄藤埋土单边清除机结构图
Fig.2 Structure diagram unilateral cleaning machine for graperine buried by soil with rotary impeller
1.2 工作原理
正常作业时,葡萄藤清土机通过三点悬挂方式与拖拉机连接,根据葡萄藤埋土的厚度和宽度调整刮土板的位置和角度,同时调整拖拉机的液压悬挂系统和限深轮的高度,使刮土板能够将葡萄藤上方的埋土完全向行间刮除;由拖拉机动力输出轴输出的动力经中间传动部件传给变速箱,变速箱将动力分2路输出:一路通过万向节联轴器传给换向器,最终传给叶轮旋转轴,使旋转的叶轮能够把葡萄藤上远离水泥柱一侧的土壤和前方刮土板刮来的土壤向行间清除;另一路经链传动传给平土搅龙,进而将清除的土壤进一步向行间输送并使其均匀地平铺在葡萄行正中间,从而完成葡萄藤的清土作业。
1.3 整机主要技术参数
整机以60 mm×60 mm×3 mm规格的方钢焊接而成的机架作为支撑,其他所有零部件都安装在此机架上,整机主要技术参数如表1所示。

表1 叶轮旋转式葡萄藤清土机主要技术参数
2 关键部件结构设计
2.1 刮土部件
刮土部件主要由刮土板、支柱和柔性橡胶组成,刮土板采用8 mm厚的钢板冲压成型,焊在无缝钢管支柱上,如图3所示。刮土部件通过钢管支柱用U型螺栓安装在机架的左前方,刮土板上下高度调节和该清土机上限深轮的调节共同决定刮土板入土的深度,即清除葡萄藤上方埋土的厚度,刮土板沿轴向旋转角度的大小对作业时机器前进阻力和壅土率有很大影响,从上往下看,逆时针旋转的角度越大,刮土板刮土的幅宽越大、机器前进阻力越大、向前壅土越严重,刮土板的前后固定位置配合其旋转角度进行调节,保证在角度调节过程中,刮土板的后侧不与叶轮片的外边缘干涉即可,刮土板上下高度、前后位置和沿轴向旋转角度的调节范围依次为0~140 mm、0~150 mm、0~30°。

1. 支柱 2. 刮土板 3. 柔性橡胶
作业时,要求刮土板受到的纵向阻力小、翻运顺利、粘附土壤少,且加工制造相对容易,同时需把葡萄藤上方埋土全部刮除,而且不损伤土壤里面的葡萄藤,故将其曲面设计成类似于翻垡犁的曲面结构[10],并在其底部边缘做折弯处理,同时包裹一层柔性橡胶片,用螺栓安装固定,以便磨损严重时易更换,依据第1部分叙述的葡萄藤清土农艺要求以及实际工作情况设计刮土板的总长为700 mm,上下总高度为300 mm,保证刮土时土壤不会越过刮土板顶部。
2.2 叶轮部件
叶轮部件包含叶轮轴、叶轮片、叶轮片连接件和柔性橡胶片,叶轮片采用4 mm厚的钢板激光切割而成,叶轮轴的上端通过万向节联轴器与换向器输出轴连接,下端沿其轴向均匀焊接4个叶轮片连接件,叶轮片连接件与叶轮片采用螺栓连接,如图4所示。根据葡萄藤清土的厚度和清土的宽度,设计单个叶轮片的高度为240 mm,宽度为180 mm。为了保证在有效清土作业的同时避免损伤葡萄藤,在叶轮片的外边缘通过螺栓连接外边缘设计成锯齿形结构的柔性橡胶片,以便磨损严重时可以随时更换。
若柔性橡胶片伸出叶轮片的外边缘长度较大,则作业时易使橡胶片弯曲、损坏,清土效果下降,若外伸长度较小,则易使刚性叶轮片碰伤葡萄藤,故本文选择柔性橡胶片的厚度为5 mm,伸出叶轮片外边缘的长度为60 mm,具体结构参数如图4b所示。

1. 叶轮片连接件 2. 叶轮轴 3. 叶轮片 4. 柔性橡胶片
2.3 平土搅龙部件
平土搅龙部件主要由平土搅龙、搅龙支撑架、端部连接轴和带圆形座轴承组成,如图5所示,端部连接轴用来安装链传动中的从动链轮,搅龙支撑架上沿竖直方向设计一系列的安装孔,作业时,可根据实际情况更换安装孔的位置,从而来调整平土搅龙距离地面的高度。为了将葡萄藤上清除的土壤进一步向行间输送,并使其均匀地平铺在葡萄行间,配合机具中传动部件的转向,在此选择右旋的搅龙可满足作业要求。为了满足平土搅龙实际需要输送的清土量,初步确定搅龙的外径= 125 mm、内径=20 mm、螺距=230 mm,其转速大小需配合机器作业时前进速度的大小,由仿真试验得出。

1. 搅龙支撑架 2. 带圆形座轴承 3. 平土搅龙 4. 端部连接轴
3 离散元模型建立与仿真分析
3.1 离散元模型的建立
3.1.1 清土机几何模型建立
为便于仿真模拟,对在Solidworks中建立的整机三维模型进行适当的简化处理,隐去三点悬挂架、各级传动箱体和限深轮等不与土垄上的土壤直接作用的部件,同时,为了减少仿真计算量,提高仿真效率,将简化处理后的整机三维模型中的所有零件再进行0.5倍的缩小,然后导入EDEM仿真软件中[19],如图6所示。

图6 导入EDEM中的葡萄藤清土机仿真模型
由于仿真过程中主要是观察葡萄藤清土机对土垄上土壤的清除情况,故在EDEM中只生成水泥柱和土壤颗粒,忽略土壤中的葡萄藤建模。前期设计机器时,为了避免作业时损伤埋在土壤里的葡萄藤,在刮土板的底部边缘和叶轮片的外侧边缘都安装了柔性橡胶材料,但在此EDEM中没有建立葡萄藤模型,故不需要考虑葡萄藤的损伤情况,为操作方便,对机具零件统一添加材料属性为45号钢。
3.1.2 葡萄藤埋土模型建立
建立准确的土壤颗粒模型是保证仿真结果有效性的基础。现有研究表明,土壤颗粒的基本结构主要包括块状颗粒、核状颗粒、片状颗粒和柱状颗粒[20]。在本研究中,由于葡萄藤清土机后期所要作业的葡萄园内土壤质地为沙壤土,其离散度高、颗粒小、结构形状差异不大,故建模时采用EDEM自带的颗粒单元:球形结构,选择Hertz-Mindlin无滑动接触模型[21-23]。
实际作业环境中,以土垄总高度300 mm,总宽度900 mm,葡萄种植行距3 000 mm为例。为了匹配0.5倍缩小的机械模型,将葡萄藤清土机的整体模拟作业环境也进行0.5倍的缩小。运用EDEM软件建立土槽,设置其基本尺寸(长´宽´高)为1 800 mm´1 550 mm´150 mm,在土槽顶部靠近边缘一侧设置一个长×宽为1 600 mm´200 mm四边形作为虚拟颗粒工厂,以15 000个/s、初始速度为2 m/s生成粒径尺寸在2~5 mm之间且尺寸大小呈正态分布的土壤颗粒模型,总量为300 000个,生成颗粒总时间为20 s。最终生成的土垄模型总高度约为150 mm、总宽度约为450 mm,其截面形状与田间实际截面形状相似,并在土垄的一侧建立水泥柱,设定行距为1 500 mm,如图7所示。

图7 葡萄园埋藤土垄模型
3.1.3 仿真参数设置
离散元仿真参数主要包括材料本征参数与接触参数。材料本征参数包括土壤和机器零件材质(45号钢)的密度、泊松比及剪切模量,接触参数包括土壤-土壤、土壤-45号钢之间的恢复系数、静摩擦因数和动摩擦因数,其中土壤密度通过环刀法试验测量获取,其他参数参照文献[24-27]中的数据,仿真参数如表2所示。

表2 仿真参数
3.2 仿真过程与结果分析
3.2.1 仿真过程
在清土作业仿真过程中,设置葡萄藤清土机位于水泥柱一侧进行单边清土,根据机器实际作业状态及清土农艺要求可知,影响清土中心距的工作参数有:机器前进速度、叶轮转速1和搅龙转速2。以某一常规工况为例进行仿真,在EDEM中设置机器的前进速度为1 m/s,沿轴的负方向;叶轮转速为400 r/min,沿轴正方向顺时针转动;平土搅龙转速为200 r/min,沿轴正方向逆时针转动;刮土深度为80 mm,占其土垄总高度的53.3%。
在EDEM求解器模块对仿真时步、仿真时间、数据保存间隔及网格大小进行设置[22]。为保证仿真的连续性,设置其固定时间步长为5.51×10–5s(即Rayleigh时间步长的20%),总时间为22.6 s,有效作用时间为2.6 s(0~20 s为土垄模型生成时间,20~22.6 s为机器作业时间,直至机器完全运动到土槽外),数据保存间隔时间为0.05 s,网格单元尺寸设置为颗粒平均半径的2倍,以便对后续数据精准处理。
葡萄藤清土机在EDEM中仿真清土作业状态如图8所示,当机具沿着轴的负方向前进时,刮土板先将土垄上方土壤刮向行间,然后,旋转叶轮将葡萄藤上远离水泥柱一侧的土壤和刮土板刮来的土壤向行间旋转清除,最后平土搅龙将清除的土壤进一步向行间输送并使其均匀地平铺在行间,从而完成葡萄藤清土作业过程。

图8 EDEM中仿真作业状态
3.2.2 评价指标
目前国内外未见借助EDEM仿真软件对葡萄藤清土机的作业过程进行研究,也没有用来评价葡萄藤清土机作业质量好坏的统一标准,大部分只要求能够简单完成清土作业即可。结合农艺要求与实际清土作业情况可知:土垄上的土壤被清土机清除的距离太远,会抛洒到另一行,太近会导致清土不彻底,考虑到当年冬季再次埋土使用和便于后期植保机械在葡萄行间的行走作业,本文定义将土垄上土壤清除后的最佳效果为使其均匀地平铺到葡萄行正中间。土垄上的土壤被清除后在行间分布区域的中心线称为行间土壤分布中心线,称清土作业前除行间土垄以外的空白区域的中心线为行间中心线,本研究设定两者之间的距离为清土中心距,并以此作为评价清土效果的指标,如图9所示,越小,表明该清土机清土效果越好。
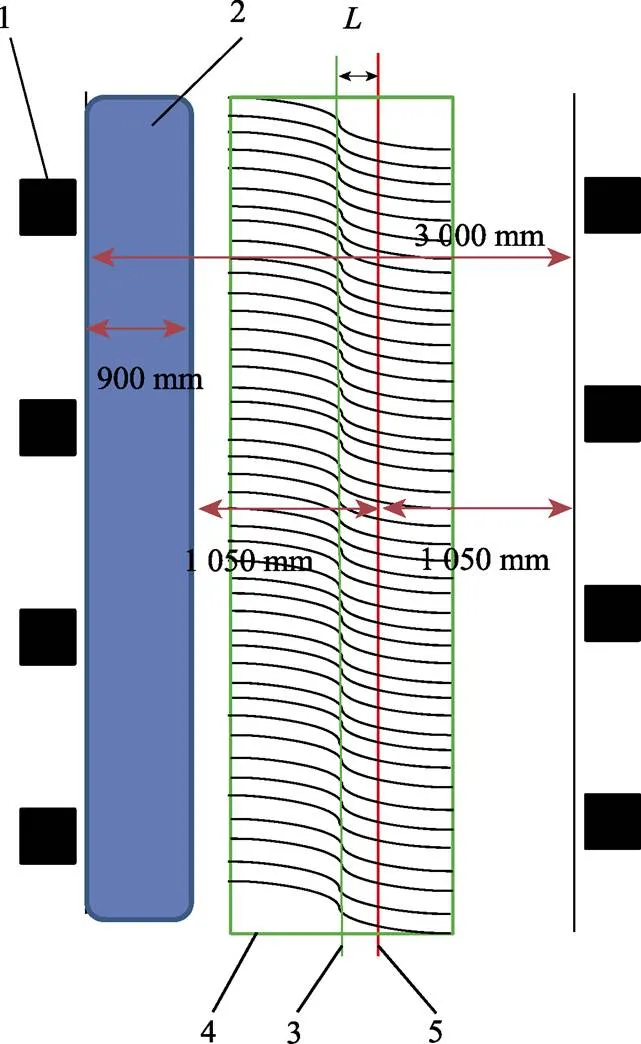
1. 水泥柱 2. 葡萄藤埋土土垄 3. 行间土壤分布中心线 4. 清除的土壤在行间的分布区域 5. 行间中心线
1. Cement pillar 2. Soil ridge of buried soil for grapevines 3. Inter-row soil distribution center line 4. Distribution of cleared soil between rows 5. Inter-row center line
注:为清土中心距,即行间土壤分布中心线和行间中心线之间的距离,mm。
Note:is the distance between the inter-row soil distribution center line and the inter-row center line, mm.
图9 清土作业效果示意图
Fig.9 Schematic diagram of soil cleaning operation effects
3.2.3 仿真结果分析
在进行葡萄藤清土作业前,先在EDEM中设置葡萄行间中心线,最终清除土垄上的土壤,使其抛洒平铺到行间,以此线为中心分布是机器的最佳作业状态,即此时土垄上清除的土壤被均匀地平铺到了葡萄行正中间;根据3.2.1设置的工作参数组合进行仿真试验,仿真试验完成后,在EDEM后处理中通过设置坐标值设定行间土壤分布中心线,这2条中心线之间的距离即为前文所述的清土中心距,作为评价机器清土效果的指标,如图10所示。从2条中心线各自坐标中的坐标值的大小即可得出此值。在预试验中,2线之间的距离=42 mm。

图10 EDEM中行间中心线和行间土壤分布中心线的确定
4 正交仿真试验与参数优化
为研究不同工况下葡萄藤清土机的作业效果,并找到使作业效果达到最佳的一组工作参数组合,在前期虚拟模型建立及数值模拟分析基础上,利用EDEM软件进行虚拟仿真正交试验研究。葡萄藤清土机的作业质量与机具前进速度、叶轮转速、平土搅龙转速、田间地面状况及土壤状态等因素有关。为提高虚拟试验的可控性与准确性,本研究选取机器前进速度、叶轮转速1和平土搅龙转速2为试验因素,以清土中心距为试验指标。依据前期模拟分析的预实验及葡萄藤清土作业要求,同时为了保证作业效率,使拖拉机行驶速度的最小值≥0.5 m/s,配合各因素可控工况范围,设定试验因素水平如表3所示。

表3 试验因素水平
在此基础上,采用3因素4水平正交试验,选用16(45)正交表[28-30]。试验次数=16,在EDEM后处理模块(Analyst)中测出每次试验结果的试验指标(mm),试验设计及结果见表4,其中,,分别代表机具前进速度、叶轮转速1和平土搅龙转速2。
由表4中极差分析知,影响土垄上的土壤被清除到行间远近的3个主次因素顺序为:叶轮转速、搅龙转速、前进速度,其较优参数水平组合为323,即叶轮转速为400 r/min、搅龙转速为300 r/min、前进速度为1.2 m/s,该状态下清土中心距=28 mm。
通过方差分析可以更准确地判断各因素水平对作业质量影响的显著性,由表5可知,对于清土中心距指标,叶轮转速1是显著影响因素,而前进速度和搅龙转速2并不显著。由于前进速度和搅龙转速2不是显著因素,故参考极差分析结果,直接选用其最佳前进速度、搅龙转速2分别为1.2 m/s、300 r/min。为了确定最佳叶轮转速1,在前进速度为1.2 m/s、搅龙转速2为300 r/min的基础上,进一步以清土中心距为试验指标,对叶轮转速1进行单因素试验。由于在叶轮转速为400 r/min的条件下,土垄上的土壤被清除平铺到行间所在区域的行间土壤中心线还没达到清土作业前葡萄行间中心线所在的位置,故取叶轮转速试验范围在400~430 r/min,平均取4个水平,即400、410、420和430 r/min。单因素试验结果表明,当叶轮转速1为420 r/min时,清土中心距最小,为22 mm,故选择叶轮的最佳转速为420 r/min。由于仿真中所有尺寸是按0.5倍缩小的,故若按1∶1试验仿真时,清土中心距的值约为44 mm。

表4 试验方案与结果

表5 方差分析结果
注:* 表示显著;检验下显著性水平=0.05。
Note: * denotes significance; significance level=0.05 undertest.
5 田间试验
为检验该叶轮旋转式葡萄藤清土机在田间的作业性能和作业效率,委托山东华龙农业装备有限公司按照前文第1部分整机结构参数和第2部分关键部件参数进行物理样机加工并进行田间试验。
5.1 试验前准备
由于物理样机加工完成后,已经过了葡萄藤清土的季节,故为了验证机器的作业性能,将试验地点就近选在该企业的试验田,试验田大小(长×宽)为150 m× 100 m,田内土壤质地为砂壤土,类似于葡萄园内的葡萄藤埋土质地。试验前,使用起垄机在田间以3 m的间距进行起垄,共起8条土垄,每条土垄长度为100 m,模拟葡萄园内的葡萄藤埋土垄形,即生成的土垄截面形状近似为等腰梯形,上底宽为400 mm,下底宽为900 mm,高为300 mm。并在土垄的侧边每间隔4 m插上一根方形木柱模拟葡萄园内水泥柱,以此形成葡萄种植行距,如图11所示。土垄上土壤密度为1.25 g/cm3,含水率为11.76%,在土垄下面埋上树枝条代替埋土的葡萄藤,枝条上方埋土厚度为160 mm,即为土垄上方刮土板刮土的厚度,此刮土厚度约占总高度的53.3%,与仿真清土厚度的百分比设置一致。机器作业前,先确定行间除土垄以外的空白区域的行中心线,做上标记。
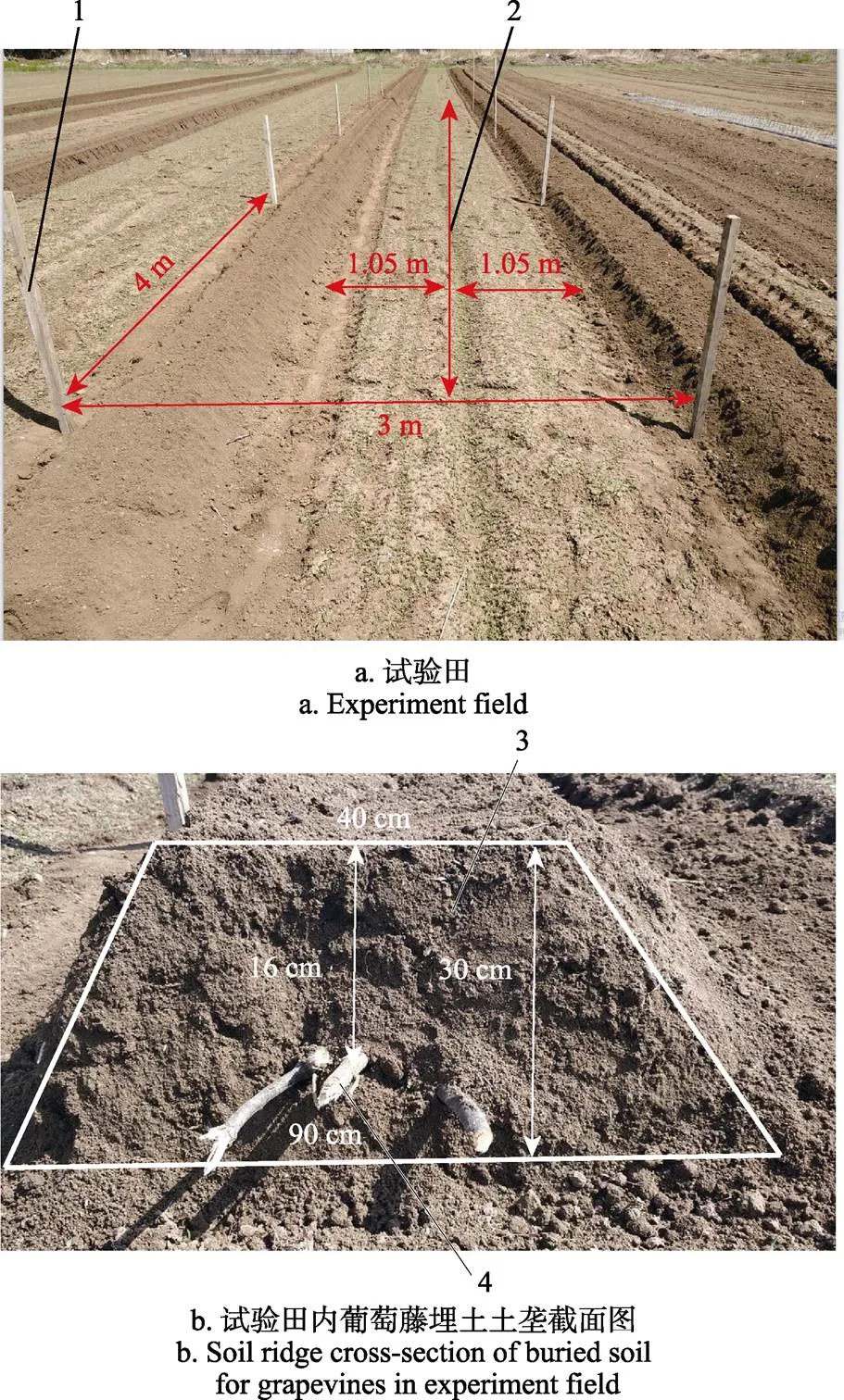
1. 水泥柱 2. 行间中心线 3. 葡萄藤埋土土垄 4. 葡萄藤
5.2 田间试验
试验时,葡萄藤清土机与拖拉机通过三点悬挂连接,并由拖拉机PTO提供动力。试验前,调节限深轮和刮土板的上下高度使其底部边缘距离地面140 mm,调节刮土板沿其支柱轴向旋转角度使刮土板板面与土垄在纵向上的放置角度为60°,调节刮土板的前后位置使其后侧边缘不与叶轮片干涉,在保证满足前文所述清土作业厚度的同时,使土垄上方土壤(葡萄藤上方覆盖的土壤)能被完全地清除。保持拖拉机在作业时的前进速度为1.2 m/s,用测速仪分别测定叶轮和搅龙的转速,分别稳定在420和300 r/min时,即工作参数和仿真优化参数一致时,开始进行清土作业,将所起的8行土垄全部试验完并观测清土效果,如图12所示。
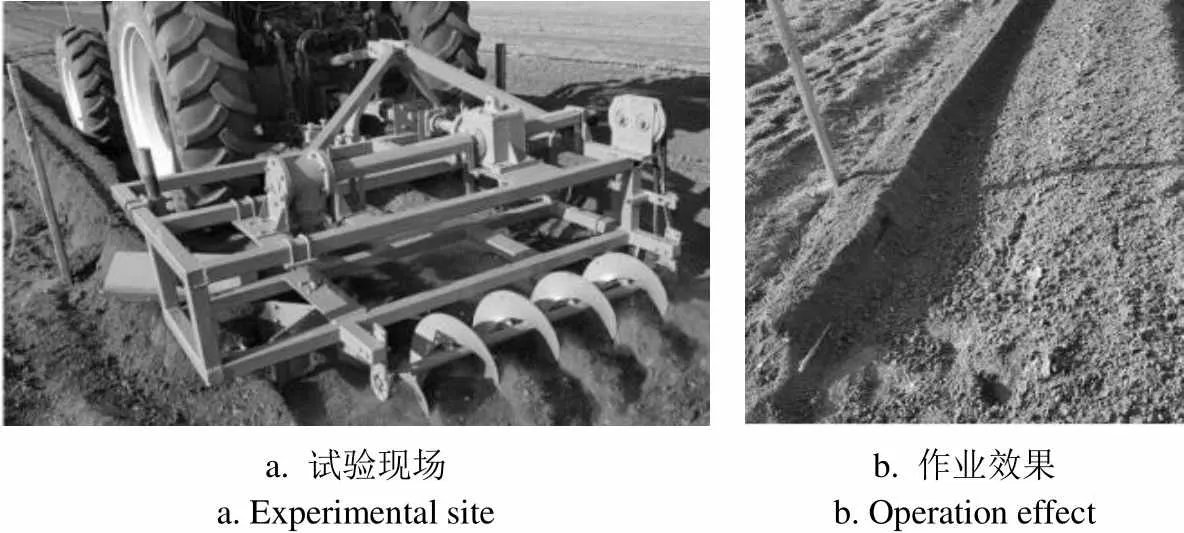
a. 试验现场 a. Experimental siteb. 作业效果 b. Operation effect
由图12b可以明显看到土垄上方和远离水泥柱一侧的土壤都被清除掉,葡萄藤从埋土中显露出来,且清除的土被均匀地平铺到葡萄行正中间,可用于当年冬季的再次埋土使用,剩下的工作只需将葡萄藤上架固定即可。
清土作业前,已经确定葡萄行间除土垄以外空白区域的行间中心线并做标识;清土作业完成后,葡萄藤上方和内侧的土壤被均匀地清除平铺在行间,用卷尺测量土垄上土壤被清除后在行间分布区域的中心线,即行间土壤分布中心线,如图13所示。最后测量这2条中心线之间的距离,即为田间试验清土中心距。对所试验的8行土垄,每行随机选取10个测量点,共得到80组数据,计算平均值,最终统计得到平均清土中心距为52 mm。

图13 行间土壤分布中心线
在本文第4部分利用优化后的参数进行仿真试验时,得到清土中心距为44 mm,故仿真优化试验结果与田间试验结果的相对误差为15%,由农业机械进行田间作业的实际经验可知该叶轮旋转式葡萄藤清土机清土作业的误差在接受范围内,故该清土机满足葡萄藤清土作业的农艺要求。
该叶轮旋转式葡萄藤清土机正常作业时,平均每天大约可有效清除2.67~3.33 hm2的葡萄藤埋土,由调研知,一名正常男性劳动力同样作业时间可清除0.07 hm2左右的葡萄藤埋土,故此机器的作业效率是人工清土作业的40~50倍。此叶轮旋转式葡萄藤清土机不仅作业效率高,而且相比其他机器,能够将葡萄藤上的埋土更多的清除下来,且不会伤到埋在土里的葡萄藤。
6 讨 论
目前春季葡萄藤清土作业是整个葡萄产业链中机械化程度较为薄弱的环节之一,葡萄藤清土机的自动化、智能化研究是未来发展的主要方向,本文设计的叶轮旋转式葡萄藤清土机是以单边埋土的葡萄藤为作业对象,作业过程中只能进行单边清土作业,由田间试验结果发现,设计安装在刮土板下边缘和叶轮片外边缘的柔性橡胶非常容易磨损,作业过程中需频繁更换,影响作业效率,可考虑替换为其他耐磨损材质制成的柔性材料。此外,由于不同地区葡萄种植园内土壤质地不同和冬季葡萄藤埋土的多异性,所以后期需要继续研究其他类型的葡萄藤清土机器,提高机器作业效率,进一步优化完善葡萄藤清土机并进行相关试验,以使其适用范围和适用区域更加广泛。
7 结 论
本文针对春季中国北方葡萄种植主产区对葡萄藤进行单边清土作业的需求,设计了一种叶轮旋转式葡萄藤清土机,并通过EDEM仿真软件及田间试验的方法对机器设计和作业性能进行了研究,得到了以下结论:
1)设计了一种主要由机架、动力传动部件、刮土部件、叶轮旋转部件、平土搅龙部件和限深轮等组成的叶轮旋转式葡萄藤清土机,该机器可将葡萄藤上方和远离水泥柱一侧的土壤全部清除,最后将清除的土壤均匀地平铺在葡萄行正中间,用以当年冬季葡萄藤埋土的再次使用和便于后期植保机械在葡萄行间行走作业,机器结构简单可靠。
2)在EDEM软件中,以机器前进速度、叶轮旋转速度1和平土搅龙转速2为试验因素,以清土中心距为试验指标,利用正交试验进行不同工作参数组合下的仿真模拟作业,由极差和方差分析结果可知,影响机器清土效果的主次因素顺序为叶轮转速1、搅龙转速2、前进速度,最终确定当机器前进速度为1.2 m/s、叶轮旋转速度为420 r/min和搅龙转速为300 r/min时,仿真清土效果最为理想,此时清土中心距为44 mm。
3)加工了物理样机,并采用仿真优化得到的参数组合进行田间作业性能测试,清土作业完成后,通过多点测量清土中心距的大小,结果表明平均值为52 mm,与仿真试验结果相对误差为15%,在误差允许范围以内。同时,通过田间试验也可以明显观察到,清土机完成清土作业后,埋在土壤下面的葡萄藤(试验中采用树枝条代替)显露出来,表明该机器对葡萄藤上方和侧边的土壤清除的比较彻底。综上,此叶轮旋转式葡萄藤清土机能够满足葡萄藤单边清土的作业要求。
[1] 徐丽明,李超,王文斌,等. 葡萄生产机械化技术与装备[J]. 新疆农机化,2012(5):24-26. Xu Liming, Li Chao, Wang Wenbin, et al. Grape production mechanization technology and equipment[J]. Journal of Xinjiang Agricultural Mechanization, 2012(5): 24-26. (in Chinese with English abstract)
[2] 杨文丽,赵凤芹. 葡萄覆土机械化技术发展研究[J]. 农业科技与装备,2012(10):39-40, 43. Yang Wenli, Zhao Fengqin. Research on the development of mechanized earth covering technology in grape production[J]. Agricultural Science &Technology and Equipment, 2012(10): 39-40, 43. (in Chinese with English abstract)
[3] 亣桂梅,李旋,赵艳侠,等. 2017年世界葡萄及葡萄酒生产及流通概况[J]. 中外葡萄与葡萄酒,2018(1):68-74. Da Guimei, Li Xuan, Zhao Yanxia, et al. Production and circulation of grape and its products in the world in 2017[J]. Sino-Overseas Grapevine &Wine. 2018(1): 68-74. (in Chinese with English abstract)
[4] 周伟彬. 葡萄起藤机的设计[D]. 银川:宁夏大学, 2017. Zhou Weibin. Design of Grape Vine Digging Machine[D]. Yinchuan: Ningxia University, 2017. (in Chinese with English abstract)
[5] 王志强,王海波,刘凤之,等. 前置式防寒土清除机的研制与试验[J]. 中国农机化学报,2015(6):88-91.Wang Zhiqiang, Wang Haibo, Liu Fengzhi, et al. Development and experiment of front located winter protection soil cleaning machine[J]. Journal of Chinese Agricultural Mechanization, 2015(6): 88-91. (in Chinese with English abstract)
[6] 郭家稳.浅议哈密地区葡萄埋起藤全程机械化试验推广[J]. 农民致富之友,2017(8):215-216. Guo Jiawen. A brief discussion on the extension of grapevine mechanization test in Hami area[J]. Journal of Nongmin Zhifuzhiyou, 2017(8): 215-216. (in Chinese with English abstract)
[7] 徐丽明,邢洁洁,李世军,等. 国外葡萄生产机械化发展和对我国现状的思考[J]. 河北林业科技,2014(5):124-127. Xu Liming, Xing Jiejie, Li Shijun, et al. Development of mechanization of grape production abroad and reflections on China’s current situation[J]. The Journal of Hebei Forestry Science and Technology, 2014(5): 124-127. (in Chinese with English abstract)
[8] 刘芳建,刘忠军,王锦江,等. 自动避障葡萄藤扒土机的设计与试验研究[J]. 农机化研究,2018(4):87-90. Liu Fangjian, Liu Zhongjun, Wang Jinjiang, et al. Design and experimental study of automatic obstacle-avoid digging machine for grapevine[J]. Journal of Agricultural Mechanization Research, 2018(4): 87-90. (in Chinese with English abstract)
[9] 刘松. 圆锥螺旋式入春葡萄挖藤机设计与试验研究[D]. 乌鲁木齐:新疆农业大学,2014. Liu Song. Design and Experimental Study of Conical Spiral Manner of Grape Vines in the Spring Digging Machine[D]. Urumqi: Xinjiang Agricultural University, 2014. (in Chinese with English abstract)
[10] 曾保宁,田志道,赵润良. 葡萄起藤机的设计与研制[J]. 中国农机化学报,2013(6):230-232. Zeng Baoning, Tian Zhidao, Zhao Runliang. Design and development of grape vine machine [J]. Journal of Chinese Agricultural Mechanization, 2013(6): 230-232. (in Chinese with English abstract)
[11] 于建群,付宏,李红,等. 离散元法及其在农业机械工作部件研究与设计中的应用[J]. 农业工程学报,2005,21(5): 1-6. Yu Jianqun, Fu Hong, Li Hong, et al. Application of discrete element method to research and design of working parts of agricultural machines[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2005, 21(5): 1-6. (in Chinese with English abstract)
[12] 王金武,唐汉,王奇,等. 基于EDEM软件的指夹式精量排种器排种性能数值模拟与试验[J]. 农业工程学报,2015,3l(21):43-50. Wang Jinwu, Tang Han, Wang Qi, et a1. Numerical simulation and experiment on seeding performance of pickup finger precision seed-metering device on EDEM[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(21): 43-50. (in Chinese with English abstract)
[13] 王金武,王奇,唐汉,等. 水稻秸秆深埋整秆还田装置设计与试验[J]. 农业机械学报,2015,46(9):112-117. Wang Jinwu, Wang Qi, Tang Han, et a1. Design and experiment of rice straw deep buried and whole straw returning device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 112-117. (in Chinese with English abstract)
[14] 方会敏,姬长英,Farman Ali Chandio,等. 基于离散元法的旋耕过程土壤运动行为分析[J]. 农业机械学报,2016,47(3):22-28. Fang Huimin, Ji Changying, Farman Ali Chandio, et a1. Analysis of soil dynamic behavior during rotary tillage based on discrete element method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 22-28. (in Chinese with English abstract)
[15] Liu Hongxinxin, Guo Lifeng, Fu Lulu, et al. Study on multi-size seed metering device for vertical plate soybean precision planter[J]. International Journal of Agricultural and Biological Engineering, 2015, 8(1): 1-8.
[16] 胡永光,杨叶成,肖宏儒,等. 茶园施肥机离心撒肥过程仿真与参数优化[J].农业机械学报,2016,47(5): 77-82. Hu Yongguang, Yang Yecheng, Xiao Hongru, et a1. Simulation and parameter optimization of centrifugal fertilizer spreader for tea plants[J]. Transactions of the Chinese Society for Agricultural Machinery, 20l6, 47(5): 77-82. (in Chinese with English abstract)
[17] 王金武,唐汉,王金峰,等. 悬挂式水田单侧修筑埂机数值模拟分析与性能优化[J]. 农业机械学报,2017,48(8):72-80. Wang Jinwu, Tang Han, Wang Jinfeng, et al. Numerical analysis and performance optimization experiment on hanging unilateral ridger for paddy field[J]. Transactions of the Chinese society for Agricultural Machinery, 2017, 48(8): 72-80. (in Chinese with English abstract)
[18] 袁全春,徐丽明,马帅,等. 我国北方葡萄冬季埋土和春季清土作业的机械化现状与思考[J]. 中外葡萄与葡萄酒,2017(6):66-67. Yuan Quanchun, Xu Liming, Ma Shuai, et al. Current situation and thinking of mechanization of grape planting in winter and soil cleaning in North China in winter[J]. Sino-Overseas Grapevine & Wine, 2017(6): 66-67. (in Chinese with English abstract)
[19] 朴顺南,张青松,刘宏博,等. 基于EDEM的双翼式深松铲设计与仿真试验[J]. 广东农业科学,2014(16):182-186. Piao Shunnan, Zhang Qingsong, Liu Hongbo, et al. Design and simulation experiment on double-wings deep-shovel based on EDEM[J]. Guangdong Agricultural Sciences, 2014(16): 182-186. (in Chinese with English abstract)
[20] 王燕. 基于离散元法的深松铲结构与松土效果研究[D]. 长春:吉林农业大学,2014. Wang Yan. Simulation Analysis of Structure and Effect of the Subsoiler Based on DEM[D]. Changchun: Jilin Agricultural University, 2014. (in Chinese with English abstract)
[21] Malone K F, Xu B H. Determination of contact parameters for discrete element method simulations of granular systems[J]. Particuology, 2008, 6(6): 521-528.
[22] Di Renzo A, Di Maio F. An improved integral non-linear model for the contact of particles in distinct element simulations[J]. Chemical Engineering Science, 2005, 60(5): 1303-1312.
[23] 方会敏,姬长英,Ahmed Ali Tagar,等. 秸秆-土壤-旋耕刀系统中秸秆位移仿真分析[J]. 农业机械学报,2016,47(1):60-67. Fang Huimin, Ji Changying, Ahmed Ali Tagar, et al. Simulation analysis of straw movement straw-soil-rotary blade system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(1): 60-67. (in Chinese with English abstract)
[24] Chen Y, Munkholm L J, Nyord T. A discrete element model for soil–sweep interaction in three Different soils[J]. Soil and Tillage Research. 2013, 126(1): 34-41.
[25] Ucgul M, John M F, Chris S. Three dimension discrete element modeling of tillage: Determination of a suitable contact model and parameters for a co-hesionless soil [J]. Bio-systems Engineering, 2015, 129(1): 298-306.
[26] 黄玉祥,杭程光,苑梦婵,等. 深松土壤扰动行为的离散元仿真与试验[J]. 农业机械学报,2016,47(7):80-88. Huang Yuxiang, Hang Chengguang, Yuan Mengchan, et al. Discrete element simulation and experiment on disturbance behavior subsoiling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 80-88. (in Chinese with English abstract)
[27] 邓佳玉,胡军,李庆达,等. 基于EDEM离散元法的深松铲仿真与试验研究[J]. 中国农机化学报,2016(4):14-18. Dong Jiayu, Hu Jun, Li Qingda, et al. Simulation and experimental study on subsoiler based on EDEM discrete element method[J]. Journal of Chinese Agricultural Mechanization, 2016(4): 14-18. (in Chinese with English abstract)
[28] 吕金庆,尚琴琴,杨颖,等. 马铃薯杀秧机设计与优化[J].农业机械学报,2016,47(5):106-114. Lv Jinqing, Shang Qinqin, Yang Ying, et a1. Design optimization and experiment on potato haulm cutter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 106-114. (in Chinese with English abstract)
[29] 郭志军,杜干,李忠利,等. 触土曲面形式对推土板减阻性能影响的正交试验[J]. 农业机械学报,2015,46(7):372-378. Guo Zhijun, Du Gan, Li Zhongli, et a1. Orthogonal experiment on resistance reduction by soil-engaging surfaces on bulldozer blade[J]. Transactions of the Chinese society for Agricultural Machinery, 2015, 46(7): 372-378. (in Chinese with English abstract)
[30] 李超,邢洁洁,徐丽明,等.柔性梳脱式酿酒葡萄脱粒机构设计与试验[J]. 农业工程学报,2015,31(6):290-296. Li Chao, Xing Jiejie, Xu Liming, et al. Design and experiment of wine grape threshing mechanism with flexible combing striping monomer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 290-296. (in Chinese with English abstract)
Development of unilateral cleaning machine for grapevine buried by soil with rotary impeller
Ma Shuai, Xu Liming※, Xing Jiejie, Yuan Quanchun, Yu Changchang, Duan Zhuangzhuang, Chen Chen, Zeng Jian
(100083,)
Due to China’s unique climate and geographical conditions, compared with foreign countries, ours grape planting requires two additional operations, which are burying soil to prevent cold in winter and cleaning soil in spring, and the degree of mechanization in the spring soil-cleaning operation is relatively low. The design and development of grapevine soil cleaner is of great significance to the industrial development of the grape planting, so aiming at the problems of low efficiency and low mechanization of artificial soil cleaning operation of grapevines in the main grape producing areas of northern China in spring, this paper design a grapevine soil cleaner with rotary impeller for unilateral cleaning soil and its operation principle was analyzed. The machine is mainly composed of the frame, the soil scraper parts, the rotary impeller part, the screw shaft of levelling soil parts, and the depth limit wheel and so on. Among them, the soil scraper parts, the rotary impeller part and the screw shaft of levelling soil parts are the main soil cleaning parts of the machine. When the machine is working, the soil of the upper part of the grapevine was scraped to the rows by the soil scraper parts, the rotating impeller parts removes the soil on the side of the grapevines away from the cement pillar and the soil that scraped by the scraper parts, and the removed soil is again transported to the rows and evenly spread between the rows of grapes by the screw shaft of levelling soil parts, through the cooperation of these mainly parts, the soil on upper part of the grapevine and on the side far from the cement pillar can be removed to the middle of the grape rows, in order to re-use the buried soil in the winter and the late plant protection machinery to walk between the grape rows. During the working, the tractor hydraulic three-point hitch and the depth limit wheel are used to adjust the height of the machine from the ground. Modeling the machine in 3D software Solidworks. In order to reduce the amount of simulation calculations and improve simulation efficiency, this machine model is appropriately simplified and all of parts were scaled down to 0.5 and then imported into the EDEM. The whole simulation test environment was also scaled down to 0.5 correspondingly, and the simulation model of soil particle was established by using EDEM software to simulate the working process and verified the feasibility of the principle of the machine. Then, the forward speed, impeller rotary speed, and the screw shaft rotary speedwere taken as the factors, and the distance between the inter-row soil distribution center line and the inter-row center line was used as an indicator to conduct the orthogonal experiments, the minimum value of distance between the inter-row soil distribution center line and the inter-row center line is used as the optimal index, as a result, obtaining the best working parameter combination of the machine: impeller rotary speed 420 r/min, screw shaft rotary speed 300 r/min, forward speed 1.2 m/s. Under this condition, the distance between the inter-row soil distribution center line and the inter-row center line in EDEM is 44 mm. Finally, manufacturing physical prototypes and conducting field tests, and the results of field tests were compared with the result of simulation experiments, the results show that the field tests’ results are basically consistent with the simulation optimization results. The soil on upper part of the grapevine and on the side far from the cement pillar was evenly laid in the middle of the rows of grapevine. The relative error between field tests and simulation tests is 15%, which satisfies the operation requirements for unilateral soil cleaning of grapevines. This study provides a reference for the development of other types of grapevine soil cleaner.
mechanization; design; optimization; grapevines; soil cleaner; EDEM
马 帅,徐丽明,邢洁洁,袁全春,于畅畅,段壮壮,陈 晨,曾 鉴. 叶轮旋转式葡萄藤埋土单边清除机研制[J]. 农业工程学报,2018,34(23):1-10. doi:10.11975/j.issn.1002-6819.2018.23.001 http://www.tcsae.org
Ma Shuai, Xu Liming, Xing Jiejie, Yuan Quanchun, Yu Changchang, Duan Zhuangzhuang, Chen Chen, Zeng Jian. Development of unilateral cleaning machine for grapevine buried by soil with rotary impeller[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(23): 1-10. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.23.001 http://www.tcsae.org
2018-07-16
2018-10-27
现代农业产业技术体系建设专项资金资助(CARS-29)
马 帅,博士生,主要从事生物生产自动化技术与装备研究。Email:13637070719@163.com
徐丽明,教授,博士生导师,主要从事生物生产自动化技术和装备研究。Email:xlmoffice@126.com
10.11975/j.issn.1002-6819.2018.23.001
S222.3
A
1002-6819(2018)-23-0001-10
