蝼蛄爪趾特性仿生钢丝辊刷除椰衣装置设计及参数优化
2018-11-23汝绍锋王居飞樊军庆
汝绍锋,王居飞,樊军庆
蝼蛄爪趾特性仿生钢丝辊刷除椰衣装置设计及参数优化
汝绍锋,王居飞,樊军庆※
(海南大学机电工程学院,海口 570228)
针对手工剥除椰子纤维外衣中存在的加工效率低、易造成人员受伤等问题,设计了一种基于蝼蛄爪趾特性的仿生钢丝辊刷除椰衣装置。该装置主要由钢丝辊刷、椰子夹紧机构和进给机构组成,其工作时依靠钢丝断面刃口勾刷椰衣纤维,结合钢丝的弹韧性实现除衣后不损坏椰壳。利用除椰衣装置开展参数优化试验,并运用Design Expert软件进行试验方案设计和结果数据分析。试验结果表明,辊刷转动速度对除椰衣厚度影响最大,刷毛栽植间距影响次之,刷毛直径影响最小;在辊刷转动速度一定时,随着刷毛栽植间距的增加,除椰衣厚度呈先增大再减小的变化趋势,但当辊刷转动速度增大时,除椰衣厚度的变化量不明显;当刷毛栽植间距一定时,随着辊刷转动速度的增大,椰衣去除的厚度会逐渐上升,刷毛直径的大小对除椰衣厚度的影响较为显著(<0.05)。试验数据回归分析结果表明,除衣装置的最优组合参数为辊刷转动速度是970 rad/min,刷毛直径是6 mm,刷毛栽植间距是10 mm,预测在最优参数组合下的除衣厚度为31.24 mm,通过重复试验证明最优组合参数可以到达规定的除衣厚度,且不损伤内部椰壳,满足椰子深加工需要。
机械化;仿生;设计;椰子;椰衣去除;钢丝辊刷
0 引 言
椰子树是棕榈科大型乔木植物,海南岛的椰子种植面积及产量占中国的90%以上[1]。中国海南和其他亚热带地区椰子加工产业链相对发达,椰子加工处理的副产品主要囊括食品领域、化妆品领域、医药品及压合木质板材等几大类[2-7]。为获取椰汁和椰肉,剥除椰衣是第一道工序,目前椰子加工主要通过人工将椰衣纤维从椰壳上撕扯下来,加工效率低,而且极易造成人员工伤[8-10],从而制约椰子加工行业的发展,因此研制科学的剥椰衣方法是提高椰子加工效率的重要环节。
国内外学者针对椰子除衣方法及相应机具研发进行了一定研究,如Jarimopas 等[11-12]研发的用于椰子幼果外层椰衣剥除的除衣机和泰国农业大学设计的一款仿形椰青加工设备[13],二者原理都是类似于机床中的车削加工,即通过旋转椰子并使剥衣刀具与椰衣不断接近从而达到剔除椰衣的效果,但工作中易破坏椰肉;由吴迪等[14]设计的利用电气控制和丝杠传动配合作业的椰子除衣机,该机采用PLC作为控制系统,适用于不同含水率的椰子除衣加工,但成本过高经济性较差;王旺平等[15]提出的采用布满除衣刺的双辊进行除椰衣作业,但容易损伤内部木质椰壳;肖仁鹏等[16]设计了丝杆螺母联动驱动方式除衣机,带动刀具刺入椰子后撑开椰衣完成剥除,属于半自动化除椰衣设备,目前该设备除衣效率较低。
椰子除衣机械装置的作业性能,一方面受到机械结构参数的影响,另一方面受到椰子不规则外形的影响,本研究基于椰衣去除工艺要求以及椰子天然特性,提出一种蝼蛄爪趾特性仿生钢丝辊刷剥除椰衣纤维的方案,并研制了一台钢丝辊刷除椰衣装置。本文对装置进行结构设计和受力分析,探究仿生钢丝辊刷除椰衣方法的可行性;运用装置进行参数优化试验,分析不同辊刷参数对除椰衣性能的影响规律,为椰衣剥除机理研究提供理论和试验依据,并可拓宽现有除椰衣研究方法的思路。
1 钢丝辊刷除衣装置结构设计
1.1 除衣装置整机结构设计
除椰衣装置主要由辊刷电机、钢丝辊刷、椰衣纤维清理器、椰子夹紧机构、椰子进给机构及机架等组成。夹紧托盘和爪趾可通过椰子旋转手轮带动椰子旋转;料台摆动机构上的操作手柄控制料台摆动轴,完成椰子的进给作业。本研究设计的除椰衣装置结构如图1所示。
由图1可知,钢丝辊刷、椰子夹紧机构和进给机构为该装置的主要工作部件,三者均竖直平行安装。工作时,先通过夹紧机构固定椰子,再通过摆动进给机构完成椰子的喂入,与高速旋转的钢丝辊刷接触,实现椰衣纤维的去除。除衣过程中通过转动手轮完成椰子周向除衣,其中可通过进给机构中卡销档位的变换,从而改变椰子和钢丝辊刷之间的摩擦力,除衣结束后通过扳动进给手柄实现椰子与辊刷脱离。该装置应选用易于启动的动力元件,且能保证具有一定的启动扭矩,因此选用YC型三相电容启动异步电动机[17],结合除衣装置对电机转速的要求,选取的电机型号为,三相YS-8014功率为750 W,额定转速为1 400 rad,变速器传动比=2~4。

1.机架 2.电机 3.提升手轮 4.升降丝母 5.钢丝刷毛 6.尼龙辊子 7.钢丝辊刷轴 8.转动手轮 9.进给上悬臂 10.椰子进给轴 11.固定爪 12.进给摆动手柄 13.制动卡销及卡销孔 14.椰子 15.夹紧托盘 16.支撑丝杆 17.进给下悬臂
1.2 钢丝辊刷仿生结构设计
仿生学研究表明,自然界中许多动物经长时间进化后,具有非常完善的土壤挖掘和剥脱果实器官,逐步形成了优化的几何结构和优良的力学性能,使其在挖掘和采食过程中能够获得较大切削力[18-22],且不损伤自己,如蝼蛄爪趾可轻松刨动土壤地面及协助口器完成进食[23-29],其爪趾外缘表现为弧形刃口结构,并具有一定弹韧性,蝼蛄爪趾形态如图2所示。由于椰衣纤维去除过程与蝼蛄爪趾挖掘土壤具有相似之处,因此本研究以蝼蛄爪趾为仿生原型,设计一种利用钢丝辊刷实现机械式除椰衣的方法。

1.蝼蛄 2.蝼蛄爪趾
运用机械方法除椰衣的关键在于,增大椰衣纤维和作业部件的接触力,在短时间内尽量剥除较厚的椰衣,且不破坏纤维内部的木质椰壳。为满足除衣作业的生产要求,并获取具有蝼蛄爪趾特性的除衣结构,可通过剪切机切断柔性钢丝,获得辊刷执行末端刃口。由于剪切刀具对钢丝的挤压作用,会导致钢丝切口处产生锐边刃口,该剪切刃口可用于勾除和刷擦椰衣纤维,结合钢丝自身优良的韧性,在剥除椰衣后不容易损坏内部椰壳,所以钢丝辊刷适用于椰衣纤维的去除,如图3所示,为切断钢丝获得辊刷刃口。

1.钢丝刷毛 2.钢丝刷毛刃口
工作时将弹性钢丝植于尼龙辊筒上,再将尼龙辊筒套装于金属辊轴上,电机带动金属辊轴旋转,靠椰子与辊刷之间的摩擦力勾除椰衣纤维,除去的椰衣及杂质通过离心力排除。椰子在除衣前通常呈椭球体,其中赤道外径介于160~200 mm,两极外径介于180~220 mm,而除衣后的椰子通常呈球体,球体外径介于100~140 mm。基于椰子除衣前后的几何特征,本研究设计了如图4所示的弹性椰子除衣辊刷。

1.钢丝辊刷轴 2.钢丝刷毛 3.尼龙辊子
该除衣辊刷的刷毛顶端仿照蝼蛄爪趾结构,设计有弧形结构单元,该单元的弧度为50°。欲使椰子和除衣辊刷之间具有更大的接触面积,将辊刷轴向截面设计为圆弧形,弧度为45°。参考试验选用椰子大小,尼龙辊子直径设计为120 mm,圆弧形钢丝刷毛最大直径为320 mm,最小直径为220 mm,轴向长度为360 mm。
除衣辊刷作为除衣装置的重要工作部件,其运动和受力情况决定了装置的除衣效果。根据钢丝辊刷除椰衣过程和运动规律,将椰衣去除简化为如图5所示的二维模型。

1.钢丝辊刷 2.未除衣的椰子
1.Steel wire roller brush 2.Dressed coconut
注:为椰衣与钢丝辊刷之间的摩擦力,N;为椰子所受的挤压支持力,N;'为椰子受到的反作用力,N。
Note:is the friction between the coconut fiber and the steel wire roller brush, N;is the support force of the coconut, N;' is reaction force to the coconut, N.
图5 椰子受力分析示意图
Fig.5 Stress analysis of coconut
设椰子在某一瞬间为固定夹持状态,钢丝辊刷给予椰子的挤压支持力,椰子受到一个反作用力′,则椰衣与钢丝辊刷工作表面的摩擦力为

式中为钢丝辊刷表面对椰衣的动摩擦系数;为椰子横截面与钢丝辊刷横截面中心连线所成的夹角,(°)。
为保证除衣过程中摩擦力最大,使椰子横截面与钢丝辊刷横截面中心连线所成的夹角为0,则有cos=1;=′,由式(1)可知,椰子所受的支持力,以及椰衣与钢丝辊刷之间的动摩擦系数,决定了椰子所受到摩擦力的大小。为了使得椰衣能顺利地从椰子上去除,要保证>,其中为椰衣纤维的拉应力。因此在设计除衣辊刷时,应尽可能保证除衣辊刷表面和椰衣表面紧密接触,以产生较大的摩擦力,配合辊刷钢丝刃口单元结构,实现勾除椰衣纤维的目的。
1.3 椰子夹紧机构结构设计
椰子夹紧机构作业时,将椰子置于托盘上,通过旋转托盘下端的提升手轮,使椰子升高靠近固定爪,并与固定爪之间产生压紧力,实现椰子的轴向固定,同时依靠固定爪齿牙的作用,实现椰子圆周方向的固定。旋转安装在固定爪上端的转动手轮,可实现椰子在一定转动范围之内的转动,便于椰子的多角度除衣。如图6所示,为椰子夹紧机构的三维结构图。

1.椰子转动手轮 2.轴承组 3.椰子固定爪 4.椰子托盘5.丝杠 6.止动螺母7.升降丝母 8.提升手轮1.Turning hand wheel of coconut2.Bearing group 3.Fixed claw of coconut 4. Coconut tray 5.Lead screw 6. Arresting nut 7.Ascending-descending nut 8.Lifting hand wheel
根据夹紧机构的实际工作情况,椰子托盘主要受到椰子重力1以及丝杆螺母副和托盘的自身重力2和固定爪给予的压紧力3,由力的平衡可得夹紧机构下悬臂受力如下

式中是螺杆丝杠受到的载荷力,N;′是椰子托盘的支反力,0通过测量计算可知
可得丝杠承受载荷力≈800 N,结合夹紧机构实际工作情况计算丝杠螺纹中径为

式中2为丝杠螺纹中径,mm;为螺距,mm;为螺母长径比;[]为许用压强,MPa;为螺距内有效工作高度,mm。由于螺母为整体车制,其磨损后间隙不能二次调整,因此取=1.2;同时该丝杠机构为人力驱动旋转,因此材料的许用压力[]提高20%,所以[]=10 MPa。设计中螺距=4 mm,有效工作高度=0.5=2 mm。按照梯形螺纹和转动轴的校核计算方法[30],对丝杠和螺母的强度、稳定性进行校核使其满足工作要求,并计算选取适合的深沟球轴承组,经计算可得,椰子夹紧机构各零件主要参数如表1所示。
1.4 椰子进给机构结构设计
椰子进给机构作业时,椰子夹紧机构安装在椰子进给轴的上下悬臂上。椰子进给轴通过轴承安装于机架内。当椰子被夹紧机构固定后,通过扳动进给摆动手柄,实现椰子的装卡和卸载工作,且可变换不同档位,实现控制椰子对钢丝辊刷的喂入量,防止出现椰子和钢丝辊刷之间的摩擦力过大导致电机抱死的情况。当摆动手柄置于合适档位后,将椰子制动卡销横跨在摆动手柄之上,插入卡销孔,固定椰子进给机构。如图7所示,为椰子进给机构的三维结构图。
表1 夹紧机构关键部件参数
Table 1 Key parts parameter of clamping mechanism
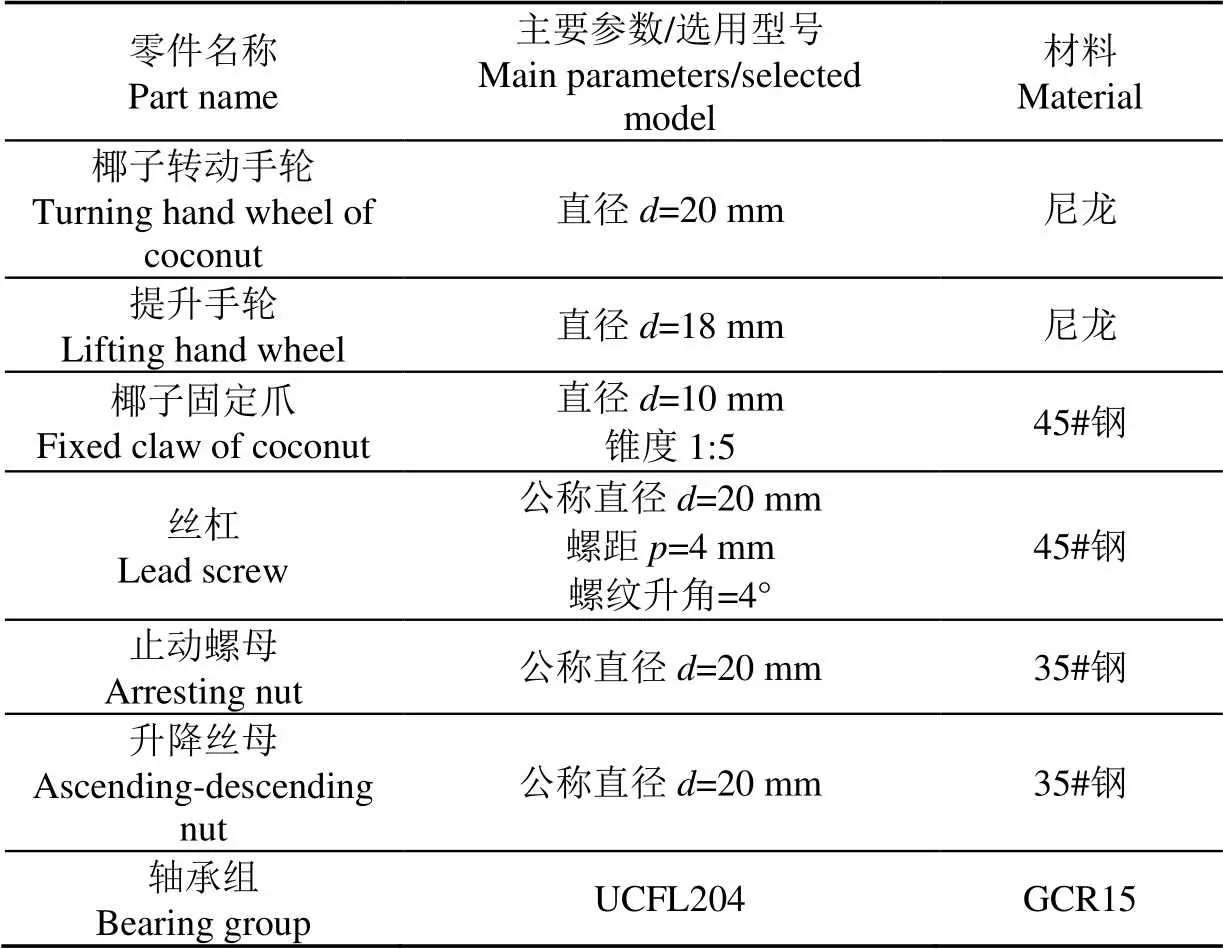
零件名称Part name主要参数/选用型号Main parameters/selected model材料Material 椰子转动手轮Turning hand wheel ofcoconut直径d=20 mm尼龙 提升手轮Lifting hand wheel直径d=18 mm尼龙 椰子固定爪Fixed claw of coconut直径d=10 mm锥度1:545#钢 丝杠Lead screw公称直径d=20 mm螺距p=4 mm螺纹升角=4°45#钢 止动螺母Arresting nut公称直径d=20 mm35#钢 升降丝母Ascending-descending nut公称直径d=20 mm35#钢 轴承组Bearing groupUCFL204GCR15

1.进给上悬臂 2.轴承组 3.机架 4.椰子进给轴 5.制动卡销6.进给摆动手柄 7.卡销孔8.进给下悬臂 9.轴承组
1.Top feeding suspension beam2.Bearing group 3.Frame 4.Coconut feeding shaft 5.Brake pin 6.Swing handle of feeding 7.Pin hole 8.Bottom feeding suspension beam9.Bearing group
图7 进给机构结构图
Fig.7 Structure diagram of feeding mechanism
结合椰子进给机构实际工作情况,依据有外延悬臂转轴的设计和校核方法,并计算选取适当的轴承组。经计算可得,椰子进给机构各零件主要参数如表2所示。

表2 进给机构各零件主要参数
1.5 除椰衣装置工作状态受力分析
为保证在除椰衣过程中,钢丝辊刷和椰子之间的摩擦力能保持在一个相对固定的范围内,就要求夹紧机构对椰子始终保持夹紧状态,即夹紧机构能够承受辊刷通过椰子传递的横向挤压合力h,为了便于工作状态分析,将除衣过程分为除衣前期、除衣中期和除衣后期3个过程。如图8所示,在除椰衣过程,辊刷和椰子的接触面宽度始终保持不变,由于接触面较窄,可近似为线接触,且该接触线会随着椰子外衣的剥除过程延展,从而使辊刷通过椰子传递给夹紧机构的横向挤压合力h线性增大。
通过万能材料试验机对椰子纤维进行拉伸试验,所有试样直至断裂为止,测量得到椰衣纤维拉伸强度如表3所示,求其拉伸强度的平均值为≈1.559 Pa。

注:L为钢丝刷毛栽植间距,mm;f1为椰衣纤维沿垂直于钢丝轴线对夹紧机构固定爪的作用力,N;f2为椰衣纤维沿垂直于钢丝轴线对钢丝刷毛的摩擦力,N;Fhq为除衣前期横向挤压合力,N;Fhh为除衣后期横向挤压合力,N;RD为除椰衣厚度,mm。

表3 椰衣纤维拉伸强度统计
因此,假设在进给机构的调节下使辊刷与椰子之间的夹紧力保持不变,为满足顺利勾除椰衣纤维的工作要求,则椰衣纤维在1 mm2单位面积上,至少受到的摩擦力d应为8.97 N。

式中钢丝辊刷表面对椰衣的动摩擦系数=0.18,椰子横截面与钢丝辊刷横截面中心连线所成的夹角=0°。由于钢丝辊刷的刷毛栽植间距不同,选取最大栽植间距max=15 mm,则可估算除衣前期、除衣中期和除衣后期夹紧机构受到的横向挤压合力分别为:hq≈1 200 N,hz≈2 000 N,hh≈3 000 N。
在工作过程中,夹紧机构固定爪受到的主要集中载荷为钢丝辊刷和椰果之间的摩擦力,且在除衣后期将达到最大值max,取钢丝和椰衣纤维之间的动摩擦系数=0.18,可得椰衣纤维沿垂直于钢丝轴线对夹紧机构固定爪的作用力1为540 N。

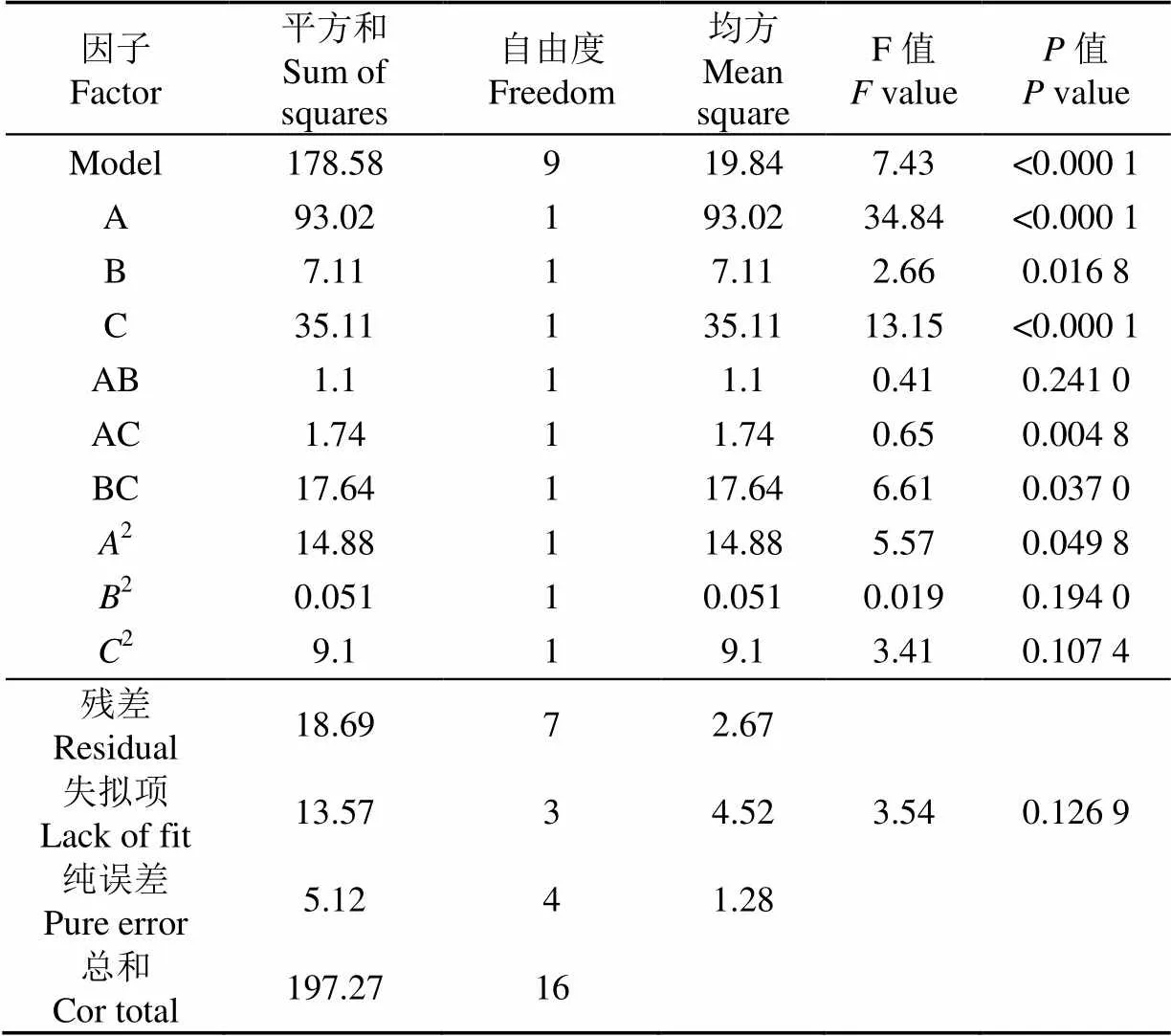
夹紧机构固定爪在集中载荷的作用下,不发生失效断裂的前提是最大正应力max 又因夹紧机构固定爪轴截面为实心圆,且截面直径j=20 mm,则夹紧机构抗弯截面系数z为0.79。 由式(7)和(8)得夹紧机构固定爪受到的最大正应力max为85.44 MPa。 由式(9)可知max<b=200 MPa,所以椰子夹紧机构固定爪不会在除衣过程中发生断裂危险,可长时间夹持椰子稳定工作。 在工作过程中,由于除衣前、中和后期夹紧机构受到的横向挤压合力分别为:hq≈1 200 N,hz≈2 000 N,hh≈3 000 N,且在3个时期参与工作的钢丝刷毛有效面积依次约为:hq≈24 mm2,hz≈40 mm2,hh≈60 mm2,则可得钢丝刷毛在单位面积上受到夹紧机构对其作用的压紧力s≈55.6 N,钢丝和椰衣纤维之间的摩擦系数=0.18,则在单位面积上,椰衣纤维沿垂直于钢丝轴线对钢丝刷毛的摩擦力2为10 N。 由式(10)和(5)可知,2>d=8.97 N,所以钢丝刷毛满足顺利勾除椰衣纤维的工作要求。由于钢丝刷毛的最小长度s=50 mm,为保证钢丝刷毛可有效地勾除椰衣纤维,则要求其具有一定的弯曲强度,参照式(7)的计算方法,可得钢丝刷毛在工作状态下的最大弯矩′max=250 N·mm,又因单位面积钢丝刷毛截面可近似看作直径s=0.56 mm的实心圆,参照式(8)计算方法可得钢丝刷毛抗弯截面系数′=0.02,从而可计算得钢丝刷毛的最大正应力max=12 500 Pa,由于max 参考课题前期对除衣过程中力学数据测试分析可知,影响椰子除衣性能的因素较多,如椰子含水率、除衣执行端材质和外径尺寸等,本研究针对含水率在一定范围内的同质量椰子进行除衣,重点分析除衣装置对除衣性能的影响规律,以辊刷转动速度(因素)、钢丝刷毛直径(因素)、钢丝刷毛栽植间距(因素)3个因素作为对象,进行试验分析和研究。选取同期生椰子为试验原材料,赤道外径范围控制在为175~185 mm,且为非椰青的成熟椰子,辊刷转动速度要保证单位时间内除椰衣厚度达到实际生产需要,又需满足除衣后期辊刷和椰子之间的摩擦力要求;刷毛直径的选取要求刷毛具有一定的弯曲强度,即刷毛和椰衣纤维摩擦撕扯的过程中,不发生断裂和塑性变形;刷毛栽植间距要避免刷毛过于密集或过于稀疏,从而导致椰衣纤维堵塞钢丝辊刷或无法顺利进行纤维剥除工作,同时结合多次前期探索试验,获得试验因素水平的选取范围如表4所示。 表4 试验因素选取范围 研究采用Design Expert软件的试验设计方法,进行试验方案设计。即将表3中3个因素的上下限值输入软件中,设定二次方计算方法,生成17组试验方案[31],如表5所示。研究以除椰衣厚度为试验指标,同时参考木质椰壳破损情况,综合分析不同试验参数的除衣性能。当要改变方案参数时,只需重新安装相应参数的辊刷盘即可,试验中通过调节变频器的频率改变电机转速,实现辊刷转动速度的调节,如图9所示为钢丝辊刷除衣装置实物。 表5 除衣试验方案 1.进给上悬臂 2.椰子固定爪 3.钢丝辊刷 4.椰子 5.椰子托盘 6.丝杆 7.进给下悬臂 8.提升手轮 9.电机 1.Top feeding suspension beam 2.Fixed claw of coconut 3.Steel wire roller brush 4.Coconut 5.Coconut tray 6.Lead screw 7. Bottom feeding suspension beam 8.Lifting hand wheel 9.Motor 图9 仿生钢丝辊刷除椰衣装置 Fig.9 Removing coconut fiber device by bionic steel wire roller brush 分别将方案中钢丝辊刷安装在辊轴上,并将辊刷组合体固定在机架工位上,为获得良好除衣效果,每组试验进行1 min。试验开始前测量初始椰子外径值max,试验结束后再测量除衣后椰子外径值min,计算除椰衣厚度D为 为提高试验结果精度,每组安排2个大小相近的椰子进行试验,除衣前后对每个椰子均进行3次等精度外径测量,取初始外径max和除衣后外径min的6次测量结果平均值作为最后统计数据,按方案参数依次进行试验,并记录试验数据,试验结果如表6所示。 表6 试验结果统计 注:Y=是,N=否。 Note: Y=yes, N=no. 由于试验选用的是成熟椰子,椰衣纤维厚度一般在26~32 mm之间,椰衣内部包括着木质椰壳,为满足椰子深加工要求,只有当除衣厚度D≥25 mm时才可视为除椰衣装置达到工作效果,且保证不能损伤内部木质椰壳。 由表6试验结果可知,除椰衣厚度平均值在21~31 mm之间,其中7号试验(辊刷转动速度800 rad/min、刷毛直径6 mm、刷毛栽植间距15 mm)除衣厚度最小,其值为21.10 mm;13号试验(辊刷转动速度1 050 rad/min、刷毛直径6 mm、刷毛栽植间距10 mm)除衣厚度最大,其值为31.02 mm。为分析试验参数是否满足椰子加工要求,需统计椰衣去除厚度和木质椰壳是否破损两项指标,由试验统计结果可知,1、3和7号试验除衣厚度小于25 mm没有达到除衣工作效果,而4和10号试验除衣厚度虽大于25 mm,但已经造成木质椰壳破坏,不能满足椰子加工要求。 分析采用Design Expert软件中的Box-Benhnken Design(BBD)模块进行数据处理,对除椰衣试验结果进行方差分析和试验因素的参数优化。利用试验方案和试验结果进行多元回归拟合计算,得到除椰衣厚度D与试验因素之间的数学模型关系为 式中为辊刷转动速度,rad/min;为刷毛直径,mm;为刷毛栽植间距,mm。此数学模型可用于钢丝辊刷不同参数组合对除衣厚度影响的分析和预测。由式(12)和方差分析计算可得试验分析结果,如表7所示,由方差分析结果可知,除椰衣厚度D的模型显著性值小于0.000 1,说明该模型显著,具有统计学意义。 表7 试验结果方差分析 注:<0.01,极显著;<0.05,显著。 Note:<0.01: Very significant;<0.05: Significant. 在试验设计中,所得模型与试验的拟合程度高且可信,就要求方差分析结果中失拟项的值要大于0.05。由表7结果可得,目标函数D的模型失拟项值是0.1269,大于0.05,说明失拟项不显著,无需考虑失拟因素存在,同时由分析结果还可计算出模型的2值为0.905 3,表明分析的模型具有较好的拟合性,可用该回归方程表示真实试验点,并对试验结果进行数据分析处理。 通过方差分析结果可知,对于目标函数D的影响,因素和极显著,、、和2显著,试验中3个因素对除椰衣厚度的显著性顺序为:辊刷转动速度>刷毛栽植间距>刷毛直径;结果中1、3和7号试验除衣厚度较小,没有满足除衣效果,说明辊刷转速较低对作业影响较大,4和10号试验除衣厚度虽较大,但均导致内部椰壳破坏,说明在辊刷速度较高时,刷毛直径过大会损伤椰壳;考虑交互作用对试验结果的影响,刷毛直径和刷毛栽植间距的交互作用最为显著。 为分析交互作用对除椰衣厚度的影响规律,选择、2组交互因素,进行差异极显著的交互项分析,分析中采用控制变量的方法,使某一因素的中间值固定,分析其他2个因素对除椰衣厚度的影响,各个因素的中间值为:辊刷转动速度为1 050 rad/min,刷毛直径为6 mm。以式(12)模型为依据,利用试验设计软件可得除椰衣厚度随各因素变化规律的曲面图,分析结果如图10所示。 图10 不同因素间交互作用响应面图 由图10a可知,在辊刷转动速度一定时,随着刷毛栽植间距的增加,除椰衣厚度呈先增大再减小的变化趋势,但当辊刷转动速度增大时,除椰衣厚度的变化量不明显;当刷毛栽植间距一定时,随着辊刷转动速度的增大,椰衣去除的厚度会逐渐上升。由图10b可知,当刷毛栽植间距一定时,刷毛直径的大小对除椰衣厚度的影响较为显著,且二者之间呈抛物线关系变化;在刷毛直径不变时,刷毛栽植间距对除椰衣厚度的影响较小。 运用试验设计软件中的Optimization Numerical模块,对除衣试验结果回归方程计算最优组合参数为:辊刷转动速度是969.11 rad/min,刷毛直径是6.01 mm,刷毛栽植间距是9.82 mm;预测在最优参数组合下的除衣厚度△为31.24 mm,能够满足椰子深加工生产要求。 为进一步验证参数的可靠性,对最优组合参数进行重复性试验。选取最优组合参数圆整值,辊刷转动速度(因素)取970 rad/min,刷毛直径(因素)取6 mm,刷毛栽植间距(因素)取10 mm,进行3次平行除椰衣试验,每次试验结果等精度测量3次,取平均值作为试验数据,3次试验的除衣厚度依次为:32.56、31.16、32.07 mm,得其平均除椰衣厚度为31.93 mm,且木质椰壳均未破损。试验结果满足椰子深加工生产需要,误差为0.69 mm。由重复试验结果可进一步验证钢丝辊刷除衣装置最优组合参数的正确性。 1)针对椰衣纤维剥除多采用手工作业完成,易导致人员受伤且效率低,提出一种仿生钢丝辊刷进行除椰衣的方法,并设计了除衣装置。该装置主要由钢丝辊刷、椰子夹紧机构和进给机构组成,其工作关键是依靠钢丝切口断面的锐边刃口,勾除和刷擦椰衣纤维。结合钢丝优良的弹韧性,实现剥除椰衣后不易损坏内部椰壳,满足椰子深加工需要。 2)除衣装置试验结果表明,影响除椰衣厚度的主次因素为,辊刷转动速度>刷毛栽植间距>刷毛直径,其中刷毛直径和刷毛栽植间距的交互作用最为显著。方案中7号试验除衣厚度最小,13号试验除衣厚度最大,4和10号试验除衣厚度虽较大,但已造成椰壳破坏。 3)通过试验数据的回归分析,获得除衣装置的最优组合参数为:辊刷转动速度为970 rad/min,刷毛直径为6 mm,刷毛栽植间距为10 mm,预测在最优参数组合下的除衣厚度为31.24 mm。通过重复试验验证最优组合参数可以到达规定的除衣厚度且不损伤内部椰壳,满足椰子深加工生产要求。 [1] 王政,黄广民,赵斌,等. 椰衣半纤维素的提取及其结构表征[J]. 食品科学,2017,38(14):245-249. Wang Zheng, Huang Guangmin, Zhao Bin, et al. Extraction and structural characterization of hemicellulose from coconut coir fiber[J]. Food Science, 2017, 38(14): 245-249. (in Chinese with English abstract) [2] Winfield I J. Fao statistical yearbook 2012: World food and agriculture-edited by A. Prakash and M. Stigler[J]. Journal of Fish Biology, 2012, 81(6): 2095-2096. [3] 吕方方,陈华,宋菲,等. 椰子油脂质体保湿霜的制备和性能测试[J]. 日用化学工业,2018,48(4):227-230,242. Lu Fangfang, Chen Hua, Song Fei, et al. Preparation and properties test of moisturizing cream based on coconut oil liposome[J]. China Surfactant Detergent & Cosmetics, 2018, 48(4): 227-230, 242. (in Chinese with English abstract) [4] Food and Agriculture Organization. Fao Statistical Yearbook 2012: World Food and Agriculture[M]. Rome: Food and Agriculture Organization, 2012. [5] 张晓青,马思聪,闫瑞昕,等. 椰子粉中蔗糖和葡萄糖添加量的快速检测[J]. 食品工业科技,2018,39(4):240-243. Zhang Xiaoqing, Ma Sicong, Yan Ruixin, et al. Rapid determination of sugar and glucose addition content of coconut powder[J]. Science and Technology of Food Industry, 2018, 39(4): 240-243. (in Chinese with English abstract) [6] 郑侃,梁栋,张喜瑞. 椰子废弃物综合利用现状与分析[J]. 广州农业科学,2013(5):175-176. Zheng Kan, Liang Dong, Zhang Xirui. Status and analysis of coconut waste’s comprehensive utilization[J]. Guangdong Agricultural Sciences, 2013(5): 175-176. (in Chinese with English abstract) [7] 周文化,杨慧敏,李维敏,等. 椰子水饮料贮藏稳定性及流变学特性的试验研究[J]. 农业工程学报,2013,29(19):262-267. Zhou Wenhua, Yang Huimin, Li Weimin, et al. Experimental study on storage stability and rheological property of coconut water beverage[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(19): 262-267. (in Chinese with English abstract) [8] 伍湘君,樊军庆,毛舟,等. 椰子剥衣机研究现状与发展趋势[J]. 食品与机械,2014(2):262-265. Wu Xiangjun, Fan Junqing, Mao Zhou, et al. Research status and developing tendency on coconut husking machine[J]. Food & Machinery, 2014(2): 262-265. (in Chinese with English abstract) [9] 张尔升,裴广一,彭伟伟,等. 资源整合,价值链延伸与区域经济发展:以海南岛椰子精深加工为例[J]. 海南大学学报:人文社会科学版,2012,30(1):99-105. Zhang Ersheng, Pei Guangyi, Peng Weiwei, et al. Resource integration,value chain extension and regional economic development: The case of deep-processing of coconut in Hainan[J]. Humanities & Social Sciences Journal of Hainan University, 2012, 30(1): 99-105. (in Chinese with English abstract) [10] 毛彧,傅国华. 海南椰子产业发展中的问题及对策[J]. 江苏农业科学,2012,40(7):410-411. Mao Yu, Fu Guohua. Problems and countermeasures in the development of hainan coconut industry[J]. Jiangsu Agri-cultural Sciences, 2012, 40(7): 410-411. (in Chinese with English abstract) [11] Jarimopas B, Ruttanadat N. Development of a young coconut fruit trimming machine[J]. Journal of Food Engineering, 2007, 79(3): 752-757. [12] Ruttanadat N, Jarimopas B. Young coconut fruit trimming machine[J]. Agricultural Science Journal, 2010, 41(1): 405-408. [13] Jarimopas B, Ruttanadat N, Terdwongworakul A. An automatic trimming machine for young coconut fruit[J]. Biosystems Engineering, 2009, 103(2): 167-175. [14] 吴迪,张宝珍,张志强,等. 基于PLC的椰子剥衣机控制系统的设计[J]. 农机化研究,2017,39(6):202-208,213. Wu Di, Zhang Baozhen, Zhang Zhiqiang, et al. Design of coconut shell dryer control system based on PLC[J]. Journal of Agricultural Mechanization Research, 2017, 39(6): 202-208, 213. (in Chinese with English abstract) [15] 王旺平,李诗龙,刘晓艳. 椰子剥壳机的研制[J]. 农业机械,2011(20):179-181. Wang Wangping, Li Shilong, Liu Xiaoyan. Research and manufacture of coconut sheller[J]. Farm Machinery, 2011(20): 179-181. (in Chinese with English abstract) [16] 肖仁鹏,马鑫,刘四新,等. 椰子自动剥衣机的设计[J]. 食品与机械,2012,28(1):142-143. Xiao Renpeng,Ma Xin,Liu Sixin, et al. Design of the automatic coconut husking machine[J]. Food & Machinery, 2012, 28(1): 142-143. (in Chinese with English abstract) [17] 崔俊伟. 玉米联合收获机剥皮装置结构及运动参数的优化设计[D].北京:中国农业机械化科学研究院,2009. Cui Junwei. Optimization Design of Structure and Motion Parameters of the Husking Device of Corn Combine Harvester[D].Beijing: Chinese Academy of Agricultural Mechanization Sciences, 2009. (in Chinese with English abstract) [18] Ren L Q. Progress in the bionic study on anti-adhesion and resistance reduction of terrain machines[J]. Science in China Series E: Technological Sciences, 2009, 52(2): 273-284. [19] 汲文峰,佟金,贾洪雷,等. 鼹鼠爪趾几何结构量化特征分析[J]. 农业机械学报,2010,41(4):193-198. Ji Wenfeng, Tong Jin, Jia Honglei, et al. Quantitative characteristic features of the geometric structure of claws of mole rat toe[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(4): 193-198. (in Chinese with English abstract) [20] Jia H L, Li C Y, Zhang Z H, et al. Design of bionic saw blade for corn stalk cutting[J]. Journal of Bionic Engineering, 2013, 10(4): 497-505. [21] Ren L Q, Liang Y H. Biological couplings: Function, characteristics and implementation mode[J]. Science China (Technological Sciences), 2010, 53(2): 379-387. [22] 李心平,马磊,耿令新,等. 玉米种子仿生脱粒机性能试验与参数优化[J]. 农业工程学报,2017,33(5):62-69. Li Xinping, Ma Lei, Geng Lingxin, et al. Performance test and parameter optimization of corn seed bionic thresher[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2017, 33(5): 62-69. (in Chinese with English abstract) [23] 张琰. 东方蝼蛄耦合特性、运动学建模及其功能仿生研究[D].长春:吉林大学,2011. Zhang Yan. The Research on the Coupling Characteristics, Kinematics Modeling and Bionic Application of Mole Cricket (Gryllotalpa Orientalis)[D]. Changchun: Jilin University, 2011. (in Chinese with English abstract) [24] 高吭. 东方蝼蛄(Gryllotalpa orientalis Burmeister):特征、功能、力学及其仿生分析[D]. 长春:吉林大学,2009. Gao Hang. Characteristic, Function, Mechanics and Bionic Analysis of Oriental Mole Cricket (Gryllotalpa Orientalis Burmeister)[D]. Changchun: Jilin University, 2009. (in Chinese with English abstract) [25] 高吭,李玉柱,佟金,等. 东方蝼蛄口器结构与表皮纳米力学性能研究[J]. 农业机械学报,2011,42(8):224-227. Gao Hang, Li Yuzhu, Tong Jin, et al. Microstructure and nanoindentation properties of mouthparts of oriental mole cricket[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(8): 224-227. (in Chinese with English abstract) [26] 张志君,孙旭伟,金柱男,等. 大豆播种机破碎式仿生覆土装置设计与试验[J]. 农业机械学报,2018,49(2):34-40,73. Zhang Zhijun, Sun Xuwei, Jin Zhunan, et al. Design and test of crushing bionic soil covering device of soybean seeder[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 34-40,73. (in Chinese with English abstract) [27] 张琰,黄河,任露泉. 挖掘机仿生斗齿土壤切削试验与减阻机理研究[J]. 农业机械学报,2013,44(1):258-261,229. Zhang Yan, Huang He, Ren Luquan. Experiment and drag reduction mechanism of bionic excavator tooth during soil cutting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 258-261, 229. (in Chinese with English abstract) [28] 王春华,安达,李鸿键. 仿蝼蛄前爪趾形新型仿生截齿的设计与研究[J]. 机械设计,2018,35(2):82-86. Wang Chunhua, An Da, Li Hongjian. Design and research of new bionic pick inspired by mole crickets foreleg[J]. Journal of Machine Design, 2018, 35(2): 82-86. (in Chinese with English abstract) [29] Zhang Y, Huang H, Liu X, et al. Kinematics of terrestrial locomotion in mole cricket gryllotalpa orientalis[J]. Journal of Bionic Engineering, 2011, 8(2): 151-157. [30] 梁锡昌,蒋建东,李润方,等. 特种螺旋传动机构的研究[J].机械工程学报,2003,39(10):106-110. Liang Xichang, Jiang Jiandong, Li Runfang, et al. Research on a special screw transmission mechanism[J]. Journal of Mechanical Engineering, 2003, 39(10): 106-110. (in Chinese with English abstract) [31] 刘晓路,陈英武,荆显荣,等. 优化拉丁方试验设计方法及其应用[J]. 国防科技大学学报,2011,35(5):73-77. Liu Xiaolu, Chen Yingwu, Jing Xianrong, et al. Optimized latin hypercube sampling method and its application[J]. Journal of National University of Defense Technology, 2011, 35(5): 73-77. (in Chinese with English abstract) Design and parameter optimization of removing coconut fiber device by bionic steel wire roller brushbased on characteristics of claw-toe Ru Shaofeng, Wang Jufei, Fan Junqing※ (,,570228,) In order to solve the problems such as low processing efficiency and vulnerable to injury in the manual peeling of coconut fiber, a device for removing coconut by bionic steel wire roller brush based on the characteristics of claw-toe was designed. Bionics studies show that many animals in nature have very perfect soil excavation and nut peeling organs after a long period of evolution, and gradually form an optimized geometric structure and excellent mechanical properties, so that they can obtain large cutting force during the digging and feeding process without damaging themselves. For example, the claw-toe can plane the soil surface easily, and the outer edge of claw-toe is curved blade structure and has certain elastic toughness. Because of the similarity between the removal process of coconut fiber and the action of digging soil and gnawing nuts, a mechanical method of removing coconut fiber by using steel wire roller brush was designed with claw-toe as the bionic prototype in this study. On the one hand, the working performance of coconut fiber removal mechanism is affected by the mechanical structure parameters, on the other hand, it is influenced by the irregular shape of coconut. The study was based on the technological requirements of coconut fiber removal and the natural characteristics of coconut. In this paper, a scheme of removing coconut fiber by bionic steel wire roller brush was put forward, and a device for removing coconut fiber was developed. The device was mainly composed of a steel wire roller brush, a coconut clamping mechanism and a feeding mechanism, which can realize the removal, clamping, fixing and feeding of the coconut. In the work, it relied on the cutting edge of steel wire section to brush the coconut fiber, and combined the elastic toughness of the steel wire to achieve no damage to the coconut shell after removing the coconut fiber.According to the preliminary test and analysis of mechanical data in the process of coconut fiber removal in the reference project, there were many factors affecting the performance of coconut fiber removal, such as moisture content of coconut, material of the executive end of coconut fiber removal and outer diameter size, etc. In this study, clothes removal was carried out for coconut of the same quality within a certain range of moisture content, and the influence law of coconut fiber removal device on removal performance was emphatically analyzed. Three factors including the rotational speed of the roller brush, the diameter of the bristles and the spacing of the bristles were taken as the objects for experimental analysis and research. The synchronous coconut was selected as the experimental raw material, and the equatorial outer diameter range was controlled at 175 to 185 mm, and it was a matured coconut of non-coconut green. The parameter optimization experiment was carried out by using the bionic steel wire roller brush device to remove the coconut fiber, and the Design Expert software was used to carry out the test plan design and the result data analysis. The test results showed that the rotational speed of the roller brush had the greatest influence on the thickness of the coconut fiber, the influence of the spacing of the bristles was second, and the influence of the diameter of the bristles was the smallest. When the rotational speed of the roller brush was constant, the thickness of the coconut fiber increases first and then decreases with the increase of the spacing of the bristles. However, when the rotational speed of the roller brush increased, the variation of the thickness of the coconut fiber was not obvious. When the spacing of the bristles was fixed, the thickness of the coconut fiber removal would gradually increase with the increase of the rotational speed of the roller brush. The influence of the diameter of the bristles on the thickness of the coconut fiber is significant; when the diameter of the bristles was constant, the bristles were planted. The spacing had little effect on the thickness of the coconut fiber. The regression analysis results of the test data showed that the optimal combination parameters of the device were as follows: the rotational speed of the roller brush was 970 rad/min, the bristles diameter was 6 mm, the bristles planting distance was 10 mm, and the optimal combination parameters were predicted to be 31.24 mm. Repeated tests proved that the optimal combination parameters can reach the specified thickness of the undressing, and did not damage the inner coconut shell, which met the needs of deep processing of coconut. mechanization; bionic; design; coconut; coconut fiber removal; steel wire roller brush 汝绍锋,王居飞,樊军庆.蝼蛄爪趾特性仿生钢丝辊刷除椰衣装置设计及参数优化[J]. 农业工程学报,2018,34(22):27-35. doi:10.11975/j.issn.1002-6819.2018.22.004 http://www.tcsae.org Ru Shaofeng, Wang Jufei, Fan Junqing. Design and parameter optimization of removing coconut fiberdevice by bionic steel wire roller brushbased on characteristics of claw-toe[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(22): 27-35. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.22.004 http://www.tcsae.org 2018-06-29 2018-09-18 海南省自然科学基金项目(517075);海口市重点项目(2014-027) 汝绍锋,讲师,博士,研究方向为农业机械及工程仿生设计。 Email:ru.shaofeng@163.com 樊军庆,教授,研究方向为农业机械及工程仿生设计。 Email:junqing666@139.com 10.11975/j.issn.1002-6819.2018.22.004 S226; TH122 A 1002-6819(2018)-22-0027-09


2 除椰衣试验方案设计



3 除椰衣试验结果及分析
3.1 除衣试验结果


3.2 试验结果处理分析


3.3 最优试验参数组合验证试验
4 结 论