车载自组织网络下车辆移动模型仿真测试研究
2018-11-22张文都
张文都,乔 雅
(1.陕西交通职业技术学院,陕西 西安 710018; 2.西安交通大学,陕西 西安 710049)
0 引 言
目前,在车联网技术[1]特别是车载自组织网络技术(VANETs)的研究过程中,需要对道路上车辆的交通行为、特定事件,消息发布过程中的广播协议、节点组网方式、路由协议等内容进行评估测试。目前主要有实地测试和仿真测试两种方法。实地测试方法需要大量的人员及经费投入,且存在测试场景单一、可重复性差、易受环境干扰等不足,因此利用仿真平台对车联网的相关性能和功能展开测试,成为研究车联网特性的一种有效手段。
在仿真测试过程中,应尽量在仿真平台中搭建最接近真实情景的车辆移动模型进行仿真,这是因为:从宏观角度来看,车辆的移动方式直接影响VANETs的拓扑结构,进而影响数据的转发路径;从微观角度来看,不同车辆移动模型下的仿真场景中不同的区域产生的信令流量不同,对无线网络中的干扰程度也不同。
王百里等[2]在元胞自动机NaSch模型的基础上,通过设置跟车、换道规则,对合流区各车道车流量和车辆的换道率进行了仿真研究,然而NaSch模型是一种研究高速公路交通的典型模型,而车道合流区在城市道路中同样存在,此外,研究过程中未考虑车辆类型对合流区车辆行为的影响。Joerer等[3]利用Veins仿真平台对提出的基于情景感知的事故辅助方案进行测试,通过构建交叉口驶入模型,对方案在更新延时和崩溃时长两方面的性能进行了评估,然而在其仿真测试使用的移动模型中,驶入车辆只可直行,不能转弯,与实际交通情况差异较大。Nguyen等[4]利用NS-2仿真器,构建了在接口优先级队列层和应用层支持DSRC协议的车辆模型,对提出的广播框架调整算法EFAB的性能进行了评估,但其仿真场景非常单一(1 km的直线型街道),且未考虑车辆移动对广播过程中WSA分组到达率和数据包传输率的影响。Zhao Haitao等[5]提出了一种改进的路由协议IGRP,旨在提高车联网信息传输过程中的可靠性和有效性;测试中利用VanetMobiSim生成车辆移动轨迹,从数据包传输率、传输延时和路由负载三方面对协议进行评估,但缺乏对移动轨迹的具体描述,协议的应用场景(三车道交叉路口)也未说明车道上车流的行驶方向等信息,实际应用性还需进一步考证。
上述研究均通过构建相关车辆移动模型基于仿真测试的方法对所研究的车联网性能进行测试,但测试过程中多采用较为简单的车辆移动模型。考虑到实际交通的复杂性,其仿真结果的有效性大大降低,可靠度也受到影响。因此,为了系统地研究应用不同移动模型对于车联网仿真测试的影响,文中基于Veins构建仿真平台,在两种常见的按需路由协议AODV(ad hoc on-demand distance vector routing)和Bypass AODV下,对应用随机游走模型、随机驻留点模型、随机方向移动模型、参考点群移动模型和曼哈顿移动模型等不同的交通模型时VANETs的性能参数进行测试和分析,从而研究不同移动模型对车联网仿真结果的影响。
1 典型车辆移动模型
1.1 常见车辆移动模型
1.1.1 随机移动模型
随机移动模型[6]主要有三种,分别是随机游走模型、随机驻留点模型和随机方向移动模型。
随机游走模型(random walk mobility model,RW)中车辆节点从当前位置移动到下一新的位置的准则是:随机选取移动的方向和移动速度。车辆节点的移动角度范围为(0,2π),移动速度范围为(0,νmax),当车辆节点移动到仿真边界处时,以与当前相反的方向继续在仿真场景中移动。
随机驻留点模型(random waypoint mobility model,RWP)也称为随机路点模型,模型中车辆节点的移动通过随机选取目标位置来驱动,当目标位置选定时,车辆节点即在(0,νmax)范围内以恒定的速度驶向目标位置。车辆节点到达选定目标位置后,在该位置驻留一段时间Tpause,之后再随机选定下一个目标位置。通过不断调整节点的目标位置,实现车辆的持续移动。
随机方向移动模型(random direction mobility model,RDM)中车辆节点的移动规则是,随机选取一个移动方向,直至车辆到达仿真区域边界,在该边界位置处驻留一段时间Tpause后再随机选定下一个行驶方向。
1.1.2 参考点群移动模型
参考点群移动模型[7](reference point group mobility model,RPGM)中,移动节点在仿真区域内形成特定群组,每个群组有一个簇头以决定群组内成员的移动行为。簇头节点作为群组的参考点,其移动过程中的轨迹参数Vleader(t)和θleader(t)的随机偏差,将决定群组成员节点的移动速度Vmenber(t)和移动方向θmenber(t)随机移动。
1.1.3 曼哈顿移动模型
曼哈顿移动模型(Manhattan mobility model,MAN)用于模拟移动节点在由地图定义的道路上的移动性。在该模型中,有水平和垂直的街道,而且每个街道在每个方向上有两个车道。车辆节点直行、左转、右转的几率是0.5、0.25、0.25。
1.2 车辆移动模型特性对比
上述车辆移动模型中,随机移动模型均针对车辆节点个体进行模拟,除了随机方向模型主要应用于有边界场景,其他两种模型均对仿真场景无特殊要求。此外,RW和RDM模型中车辆间的相关程度较弱,无法准确刻画实际的交通状态,相对而言,RWP模型在有边界的区域进行仿真时,无论仿真初始时刻车辆节点在空间上属于何种分布,随着仿真的进行,都将逐步达到均匀分布的稳定状态[8],适合对车联网中车辆移动的模拟。
参考点群移动模型中车辆间相关性较强,与随机移动模型相比,更能反映实际交通情况,特别是簇头节点使用随机游走模型时,会降低群组节点间的时间相关性,进而影响其逼近真实的节点运动状态[9],但算法复杂度也相对较高。
此外,曼哈顿移动模型的应用场景与真实城市交通存在明显差异,在对路由协议性能进行仿真测试时,往往造成无法调整的误差,文中将通过测试对这种影响进行分析。
2 典型路由协议
2.1 无线自组网按需平面距离向量路由协议AODV
无线自组网按需平面距离向量路由协议AODV(ad-hoc on demand vector routing)[10]的执行过程由两部分组成,分别是路由发现和路由维护。路由发现主要完成数据源节点到目的节点的路由建立工作;路由维护主要完成数据传输过程中链路质量的检测和修复。
2.2 改进型路由协议Bypass-AODV
Bypass-AODV协议通过改进AODV协议的路由维护过程,实现网络连接的稳定性优化[11]。首先,Bypass-AODV利用跨层MAC通知对移动相关数据丢失的情形进行识别,然后,触发路由层,从而启动本地修复进程。通过为断开链接的上游节点设置一个旁路,并对旁路路由的搜索区域进行限制,在控制路由长度的前提下降低数据由于链路连接问题而引发的丢包。
Bypass-AODV作为AODV协议的改进方案,具有AODV协议的优点,即作为一种反应式路由协议,当且仅当源节点向目的节点发送消息时,才会触发两种协议执行路由发现这一过程,相比先验式路由协议中通过周期性广播路由信息更新和维护路由表过程,能够大大降低网络中的数据包数量。
考虑到Bypass-AODV和AODV均在时间复杂度、路由框架和报文设计等方面具有较为灵活的配置方案,这两种协议被作为车联网协议应用广泛。文中通过对比这两种路由协议在仿真中的性能,研究不同车辆移动模型对车联网测试结果的影响。
3 仿真环境及测试方案配置
3.1 仿真环境构建
文中使用Veins仿真平台对比不同移动模型对VANETs路由协议性能测试的影响。Veins仿真平台通过耦合网络仿真器OMNET++和交通仿真器SUMO,能够较为真实地模拟车联网中的交通情景和网络性能[12]。
利用交通仿真器SUMO构建车辆移动模型时,需要综合考虑模型应用的路网拓扑场景、车辆属性等因素,从而使仿真测试具有可比性。文中构建了范围为1 600 m×1 600 m的网格状城市道路场景作为测试仿真场景。同时,由于随机游走模型、参考点群移动模型和曼哈顿移动模型中车辆在做出下一步移动计划之前,无需像随机驻留点模型和随机方向移动模型一样在当前位置保持静止,故将随机驻留点模型和随机方向移动模型中涉及的驻留时间Tpause设为0。此外,为了对比不同车速条件下路由协议的性能,设置了多组最高车速限定。搭建的仿真场景基本的交通参数设置见表1。
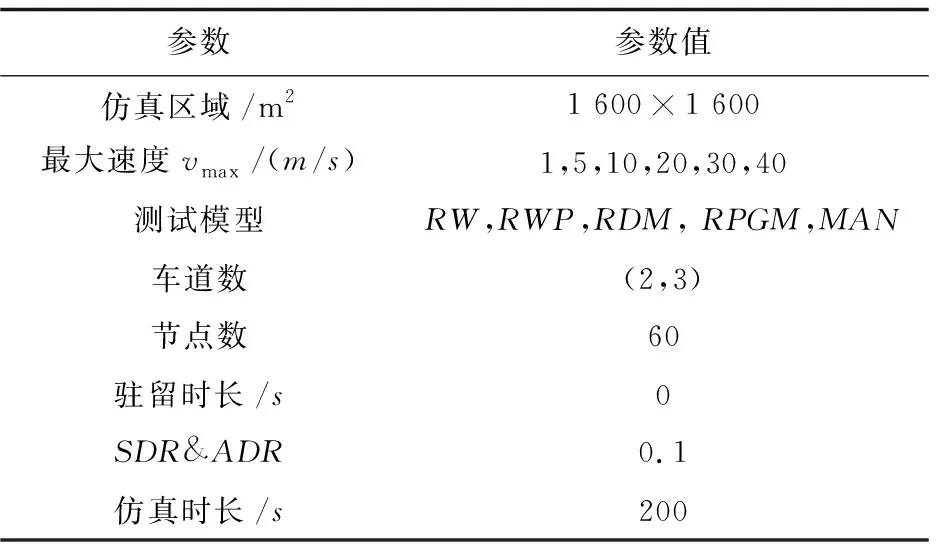
表1 交通仿真参数设置
网络仿真器OMNET++用于模拟车辆节点构建自组网络并进行数据通信。物理层模型支持IEEE802.11p协议,MAC层支持IEEE1609.4,信号传播模型使用自由空间传播模型,以信号能量强度决定数据帧能否正常传输至目标节点,选择传输控制协议TCP用以完成面向连接的通信[13]。
网络仿真参数的设置见表2。
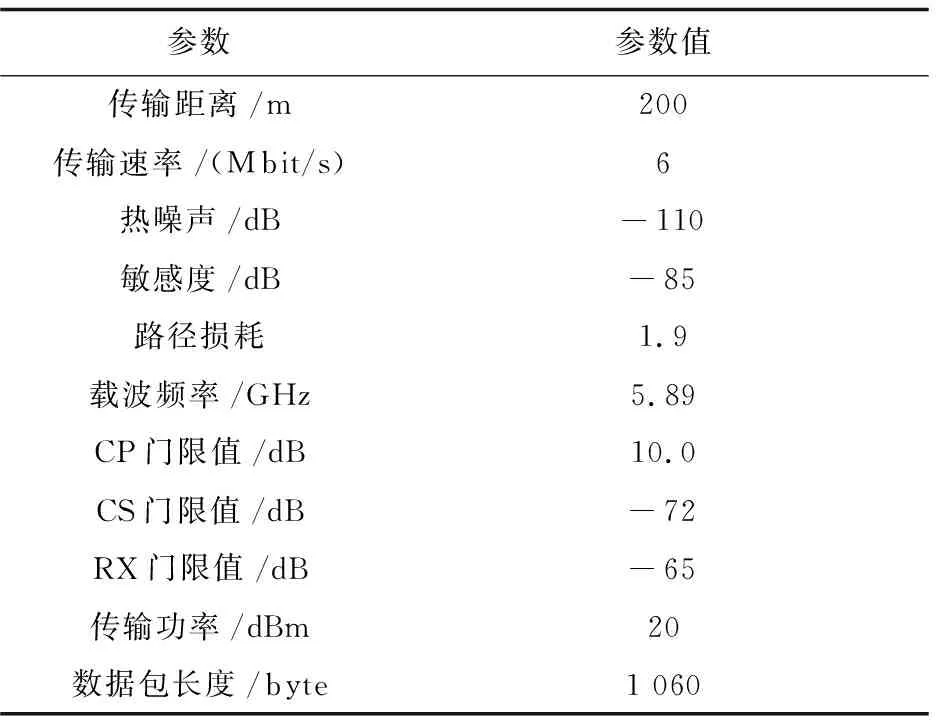
表2 网络仿真参数设置
3.2 测试方案
从通信连接长度和TCP有效吞吐量两方面[14-15],研究了不同移动模型对路由协议性能的影响:
(1)通信连接长度测试。根据1.2小节,随机驻留点模型相比其他两种随机移动模型,具有更高的真实匹配度和较低的算法复杂度。为了简化实验,本节选取随机驻留点模型,将之与参考点群移动模型和曼哈顿移动模型进行性能对比。通过统计场景中车辆节点间建立的TCP连接长度,从网络层面初步分析三种车辆移动模型对协议性能测试结果的影响。
(2)TCP有效吞吐量测试。有效吞吐量是指在吞吐量的基础上,去掉开销之后,传输有效内容的吞吐量,不包含协议开销和数据包重传数据,比吞吐量更能真实反映不同路由协议下车联网应用层的性能。通过构建特定的应用场景,并分别测试多种移动模型下路由协议所表现的网络吞吐量性能,对比分析了车辆移动模型对路由协议性能测试的影响。
4 测试结果及分析
4.1 通信连接长度测试
通信连接长度能直观地反映出不同车辆移动模型对网络拓扑结构的影响。考虑到TCP协议中,车辆进行数据收发前需通过握手建立节点间的通信连接,因此,车辆移动模型中车辆节点间的位置、速度和节点间的联系将直接影响建立的连接长度。通过在仿真场景设定多个车辆的最大行驶速度,对比了AODV 协议下三种不同车辆移动模型(RWP、RPGM、MAN)对通信连接长度的影响。不同通信连接长度在总连接数中的占比统计结果如图1所示。
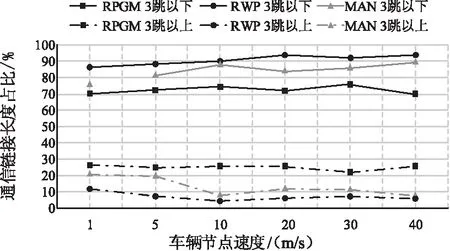
图1 通信连接长度测试统计
可以看出,对RWP和MAN而言,长度较短的通信连接长度受车速的影响较小,而通信连接长度达到4跳或以上的连接,其占比随着车辆最大行驶速度的不断增大存在明显的下降,这是因为速度越快,节点间的拓扑结构变化越快,越不利于保持稳定的通信连接;而RPGM中连接长度随着车辆速度的增加起伏并不大,这是因为该模型中节点的移动相互影响和限制,即使速度上升,节点网络拓扑变化却相对较小。也就是说,相比RWP和MAN,RPGM在给定的车联网场景中能够建立更稳定的、连接长度更长的网络拓扑结构。
4.2 TCP有效吞吐量测试
4.2.1 随机移动模型有效吞吐量测试
在仿真环境中,车辆基于车辆移动模型运动,进而造成自组网络的拓扑结构的改变。为了研究这一改变对路由协议性能的影响,在仿真场景中设定了五组固定的通信对,分别作为数据源节点和目的节点,调整通信对间的距离,然后使源节点与目的节点建立不同跳数的通信连接。考虑到数据从源节点向目的节点传输的过程中,需要经过中间节点对数据进行转发,该过程中造成数据传输链路断开的因素主要是中继节点的移动,这样,通过改变通信对间的距离即可研究由节点移动引发的链路连接或断开对路由协议的影响,进一步反映不同车辆模型对路由协议测试结果的影响。
设定车辆节点的数据传输范围为200 m,感知范围为400 m,车辆最大行驶速度为20 m/s。位置相对固定的通信对间间距以传输范围为准,分别设置为200 m、400 m、600 m、800 m、1 000 m、1 200 m。随机移动模型在不同连接跳数条件下的有效吞吐量统计情况如图2所示。

图2 有效吞吐量统计(1)
可以看到,当源节点与目的节点的距离很近(相距200 m,源节点与目的节点以单跳直接连接)时,三种移动模型在Bypass-AODV和AODV协议下产生的有效吞吐量差别很小,这是因为源节点和目的节点始终保持单跳连接,能够稳定通信,不存在中间节点运动造成通信链接断裂的情况;随着两节点间距离的逐渐增加,三种移动模型产生的有效吞吐量持续减少,这是因为利用中继节点传输数据时,依照IEEE802.11p MAC中的规定,节点在感知范围内通信时共享传输媒介,即每刻仅允许一对节点通信,因此任一中间节点的移动都可能造成仿真场景中链路的断开,当中间节点数目变多,链路断开的概率增大,势必导致有效吞吐量的下降。
同时,采用AODV协议进行数据传输,且源节点与目的节点间的连接大于3跳时,与采用RW模型相比,采用RWP模型和RDM模型时的有效吞吐量呈现较缓的降低,这主要是因为RWP和RDM模型中的车辆在短时间内更易产生相对稳定的移动轨迹(单一目的、单一方向),降低了场景中由于车辆突然调整行驶方向导致的链路断开。
此外,Bypass-AODV协议在一定程度上改善了3跳及以上连接时三种移动模型表现出的有效吞吐量,特别是RWP模型,相比RDM模型更能反映出Bypass-AODV协议对有效吞吐量较大幅度的提高。这首先是因为对RWP模型,车辆节点在设定目标后的移动过程中行驶路线较为灵活,而RDM模型中的车辆节点在仿真场景中行驶的路线较为单一,不利于Bypass-AODV为断裂的链路建立连接旁路;其次,三跳以上的连接中,源节点和目的节点开始出现在仿真边界,考虑到RDM模型中的车辆行驶终点为仿真边界,大量的车辆汇聚在边界处,相比RWP模型中更易形成的均匀的车辆节点分布,不利于建立边界到边界的连接链路。考虑到RWP模型能够产生相对多的有效吞吐,又能反映路由协议对吞吐量的提高情况,文中利用RWP模型和PRGM模型、MAN模型进行后续的对比。
4.2.2 RWP和RPGM有效吞吐量测试
本节通过对比RWP和RPGM两种移动模型,研究路由协议性能测试对仿真环境中采用的移动模型的依赖性。在构建RPGM模型时,以15个节点为一组,每个节点以重叠的方式独立自主移动。不同车辆移动速度下的TCP有效吞吐量如图3所示。

图3 有效吞吐量统计(2)
与RWP相比,RPGM移动模型中的有效吞吐量明显较大,这主要是因为RPGM模型的空间依赖特性增长了链接的生存时间。同时,对同一种移动模型而言,使用AODV和Bypass-AODV带来的区别并不明显,这主要有两方面的原因。一是两种路由协议在大多数情况下都保持了较多的短链接;二是尽管Bypass-AODV能够通过建立路由旁路减少后续传输的数据包,由于旁路路由作为临时路由仅能存在有限的时间,一旦传输完缓冲的数据包后即会启动新的路由发现机制,因此使两种协议的差别不大。此外,当车辆移动速度增加至40 m/s时,RPGM移动模型中不同路由协议下的有效吞吐量差别较为明显,这主要是因为速度的增长加大了群组间重叠的可能性,当端点存在于不同的群组中时,这种重叠会在物理层面上缩短链接端点间的距离,从而提高有效吞吐量。
4.2.3 RWP和MAN有效吞吐量测试
本节主要对RWP和MAN的有效吞吐量进行测试对比。两模型的有效吞吐量统计如图4所示。
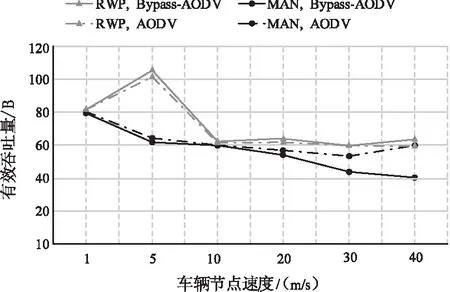
图4 有效吞吐量统计(3)
对移动模型RWP和MAN而言,除去异常点(RWP模型5 m/s处),两种模型的有效吞吐量均随速度的增加呈现逐步下降的趋势,这是因为车辆节点的高速移动会造成链接失效数量和相应的重建旁路数量的增加;同时,RWP模型下Bypass-AODV协议表现的性能要比AODV表现的性能稍高,而MAN模型下的Bypass-AODV协议性能却比AODV稍低,且在速度到达10 m/s后呈现较大幅下降,这主要归结于MAN模型下通过短跳连接完成的数据传输比例过低(见通信连接长度测试部分),而3跳以上的连接中数据传输的失败概率较大。此外,MAN模型相比RWP模型在两种路由协议下均表现出了更低的有效吞吐量。
总体而言,在当前场景中,RPGM模型能够建立更稳定的通信连接,具有更高的有效吞吐量,且能够更加直观地反映不同协议的性能。考虑到RPGM模型在维持车辆以群组方式移动时需要额外的开销,实际应用中该移动模型对冗余度的影响还需要进一步进行研究。
5 结束语
为了系统地研究不同车辆移动模型对于车联网环境的适应性,选取了五种常见的车辆移动模型,利用Veins仿真平台搭建了网格状城市道路场景,结合路由协议AODV和Bypass-AODV,从通信连接长度、TCP有效吞吐量两方面展开研究。测试结果显示,RPGM模型在给定场景中能够建立更多的多跳连接,且能产生更多的有效吞吐量,同时,能够更为直观地反映出不同路由协议性能的差别。
考虑到仿真测试结果的可靠性,针对不同的车辆移动模型,引入更多的测试参数(车流密度,驾驶员行为系数),更多的车辆行驶行为(变道车辆,合流区车流行为),精细化测试变量,将是下一步主要的研究方向。
