伺服系统超低转速估计器设计
2018-11-21姜艳娟陶永健李新玲
姜艳娟,陶永健,李新玲
(许继电气股份有限公司,河南 许昌 461000)
0 引言
高性能的永磁交流伺服系统,能够在低速阶段平顺出力,具有较高的调速比。因此,低速性能是伺服系统的重要指标之一。影响低速精度的主要因素有转矩波动、电流检测误差、摩擦以及转速检测误差等[1-3]。本文对通过提高转速检测精度来提高低速性能的方法进行了研究。
转子位置信息在伺服系统中起着重要的作用。一方面,它为矢量控制以及位置环控制提供实时的转子位置;另一方面,系统的转速一般也需要从位置信息中估计得到。仅仅采用位置信息估计转速的方法,由于受编码器精度以及采样时间等因素的制约,存在两个相互矛盾的问题:一是低速测量精度,二是暂态过程时滞问题。通过设计数字滤波器,可以有效地解决其中一个问题,但是无法同时克服,实际应用需采用折衷方案[4-8]。
采用观测器估计转速的方法,可以有效地解决低速精度和时滞问题,因此得到了众多学者的关注。观测器技术一般需要建立对象模型,根据检测到的电流、位置等信息,通过数学模型得到实际的转速[9-13]。但是,在极低速阶段,位置编码器在采样时刻到来时已不能提供准确的位置信息,因此依此计算的结果会导致较大的误差[14]。对转速观测器进行了研究,在这种情况下,采用预测-校验的方法,可以提高估计的准确性,进而提高系统的低速性能。试验结果证明了该算法的有效性。
1 典型转速观测器基本结构
典型离散形式的转速观测器结构如图1所示。
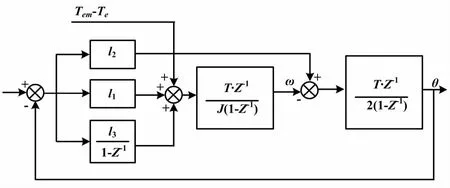
图1 典型离散式转速观测器结构图

采用预测-校验的方法克服超低转速估计位置信息不准确的问题。当没有新的位置信息可用时,通过预测得到此时的位置信息;而当码盘输出位置信息,再利用此信息校验转速位置等估计结果。利用该方案,可以在原有硬件的基础上提高低速的测量精度。
2 超低转速观测器设计
超低转速是根据具体码盘精度和采样时间决定的,此时码盘脉冲间隔大于速度采样周期,即不能保证每一采样时刻都有新的位置信息。低速码盘脉冲与采样时间关系如图2所示。
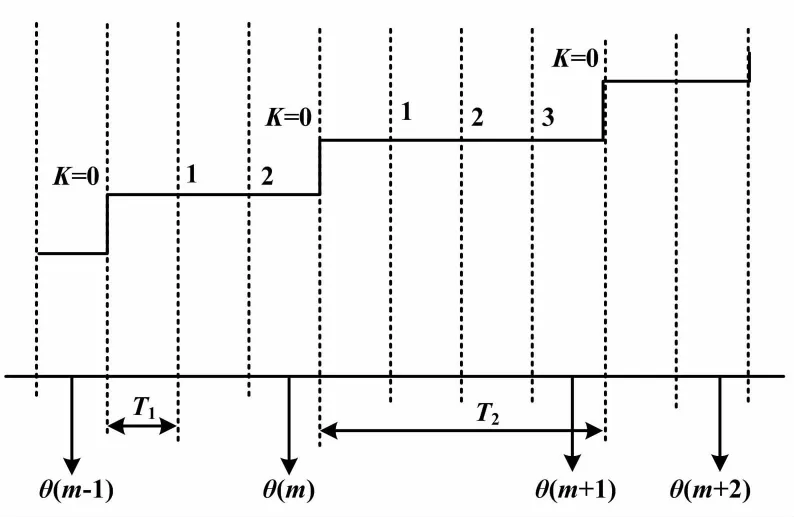
图2 低速码盘脉冲与采样时间关系图
t可定义为:
t=KT1+mT2[θ(m)]
(1)

(2)
依此构造的转速观测器如图3所示。
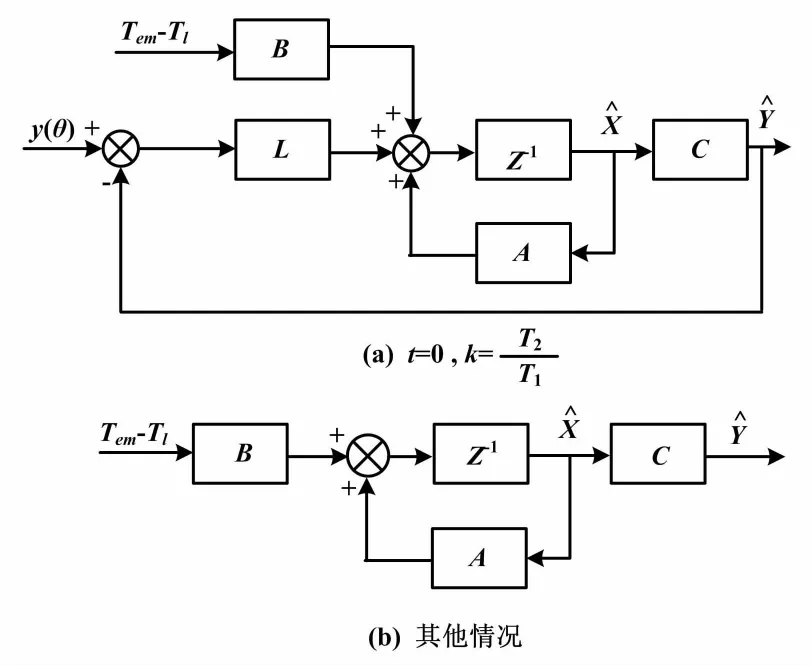
图3 超低转速观测器结构图
状态方程如下。
当K=0,K时:

(3)
当K≠0,K时:

(4)

观测器的特征方程为:
|zI-A+LC|=0
(5)
特征值多项式为:
z3+(I2-3)z2+(I1T1-2I2+3)z+
(6)
可通过选择合适的l1、l2、l3任意配置极点,使观测器的误差以足够快的速度收敛。因此使被观测的值可迅速收敛到实际值。
图3观测器结构意味着当有码盘输出信号时,观测器为闭环观测器,其观测器增益设计原理同经典观测器一致,目的是消除估计值与实际值的误差;而当没有码盘输出信号时,观测器为开环观测器,其目的是模拟一个码盘输出,为此时的速度控制提供反馈值。这样就避免了经典观测器中位置信息不准确时仍作为给定值的缺陷,同时,参数精准的开环观测器可以提高码盘的分辨率,进而降低了量化误差等噪声的扰动。
3 试验结果与分析
试验中所使用的交流永磁伺服系统,其主要参数如表1所示。

表1 交流永磁伺服系统的主要参数
测速方法对比如图4所示。
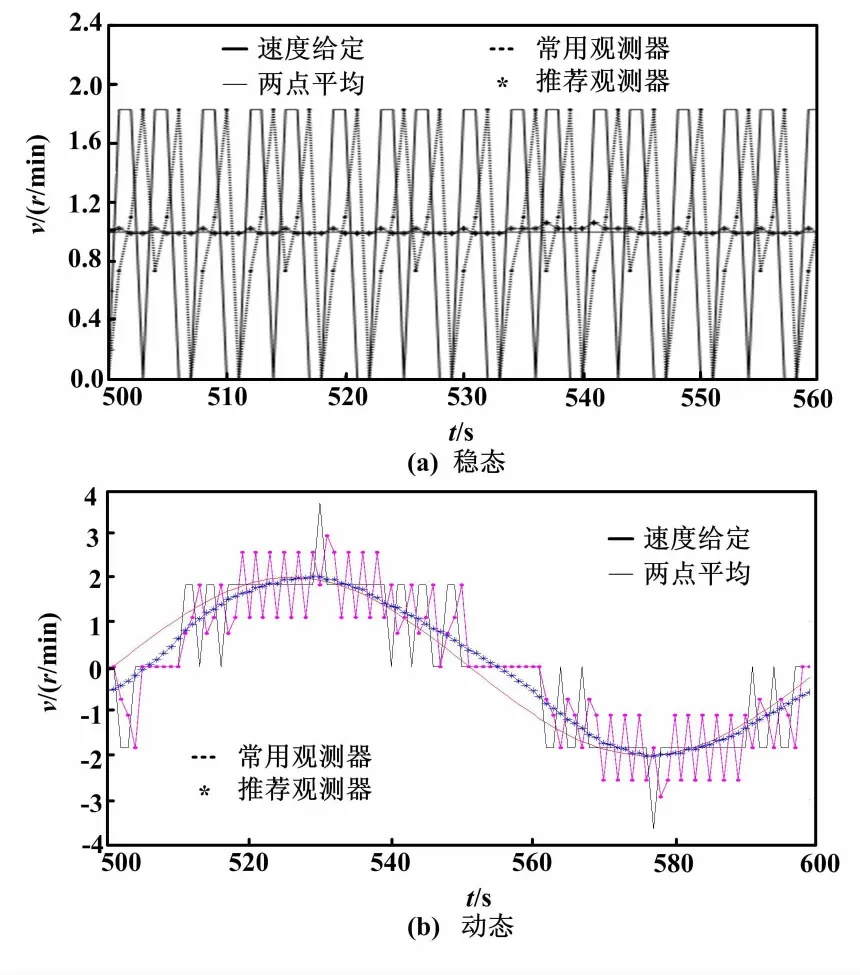
图4 测速方法对比图
所使用的交流伺服系统在文献[15]和文献[16]的研究基础上,采用数字信号处理(digital signal processing,DSP)+现场可编程门阵列(field programmable gate arrary,FPGA)结构。DSP选用TI公司的TMS320LF2407,而FPGA选用Xilinx公司的Spartan Ⅱ系列。利用FPGA实现与码盘、外围I/O、按键显示以及总线通信等接口功能,从而将DSP的CPU时间解放出来,实现较为复杂的控制算法。主回路逆变桥IPM开关频率10 kHz,码盘采用14位绝对式光电编码器,电流环采样周期100 μs,速度环采样周期1 ms。
分别采用两点平均滤波算法、传统转速观测器和超低转速观测器的对比仿真效果。
给定转速1 r/min时,在没有有效位置信息时,由于传统滤波器给定值的不准确造成转速估计的误差较大,其幅值大致和两点平均滤波算法相当;而本文研究的超低转速观测器实质上起到了细分码盘的效果,能够获得更为精确的估计值。数字滤波算法中两点平均滤波所用到的历史数据最少,因此估计转速相对的时滞也最小。
转速观测器试验结果如图5所示。

图5 转速观测器试验结果
图5(a)为以常用转速观测器作为速度反馈时1 r/min运行结果。此时,转速具有一定的静差。其原因在于在没有有效位置信号的采样时刻观测器仍然使用上一次的有效输出。图5(b)为采用超低转速观测器作为速度反馈时的运行结果,静差明显降低,由于计算字长所引起转速波动也容易被负载转动惯量所滤除。采用常用转速观测器和超低转速观测器的转速误差积分和分别为-47和12。
4 结束语
针对常用观测器超低转速的估计问题,研究的超低转速观测器在没有有效位置信息的采样时刻先预测位置信息,而在有效信息到来时刻再校正预测结果,达到了细分码盘提高转速分辨率的目的。仿真和试验结果验证了该方案的有效性。利用该方案,可以在原有硬件的基础上提高伺服系统低速运行的品质。
