基于矩阵指数的点云配准方法
2018-11-21杨正世李文国
杨正世,李文国
(昆明理工点大学机电工程学院,云南 昆明 650500)
0 引言
点云配准技术是研究不同视角,即不同参考坐标下的一组点云或多组点云。通过某种算法,将具有一定重叠度的点云数据,通过平移旋转缩放等操作变换到同一参考坐标系下,进而得到实体完整的点云数据信息[1]。它是整个三维点云数据处理中的关键步骤,不但为后期的点云数据建模提供了较为精确的点云数据,而且为构建高精度的模型提供了保证。该技术广泛应用于3D游戏[2]、物体识别[3]、大坝测量[4]、文物保护[5]、医疗矫形[6]、机器人点位导航及自动地图构建[7-8]等领域。
点云配准的关键在于求取变换矩阵。目前常用的点云配准算法,是由Paual J和Besl[9]在1992年提出的最近点迭代(iterative closest point,ICP)算法以及基于ICP算法的改进算法。点云配准优化问题,可以转化为求取一个有6个自由度的刚体变换M(R,T),将两片点云配准到同一坐标系下,使配准点云之间的距离误差达到最小。ICP算法对初始点云对的对齐要求非常高。如果初始点云对未能对齐,将会使ICP算法陷入局部最优。初始点云对对齐,将减少迭代的次数,提高点云配准的速度和精度。
目前,求解位置变换矩阵的主要方法如下。Beltrami和Jordan提出的奇异值分值(singular value decomposition,SVD)[10]法,求解的变换矩阵精度高,但是需多次迭代,会影响点云配准的速度。文献[11]对Horn[12]提出的四元素表示法进行了细致的描述。列文伯格-马夸尔特法(Levenberg-Marquardt,LM)[13]算法能够借助高斯-牛顿算法以及梯度下降法的优点,并对两者的不足之处作了改善;但是其局部搜索耗时大,求得的变换矩阵精度不高。因此,本文提出了一种基于矩阵指数表示变换矩阵的点云配准方法,从而提高求取变换矩阵的速度和精度,以及ICP算法的收敛速度和计算精度。
1 算法描述
1.1 目标函数
如前文所述,点云配准优化问题,可以转化为求取一个有6个自由度的刚体变换M(R,T),将2片点云配准到同一坐标系下,使配准点云之间的距离误差达到最小。假设待配准点云集P={p1,p2,…,pi},1≤i≤n},Q={q1,q2,…,qi},1≤i≤m。其中:n、m分别为P和Q中点云的总数。用R表示旋转变换矩阵,T表示平移变换向量,则ε(R,T)表示源点集Q在变换矩阵M(R,T)的作用下与目标点集P之间的误差。因此,求解点云配准优化的问题就可以转化为求解满足 min[ε(R,T)]的最优解,可以定义为:
(1)
式中:qi为点云集Q中的一个点云数据;pi为点云集P中的一个数据点;R∈SO(3);T∈R3。
假如(pi,qi)为对齐的点云对,ni为它们之间单个点云的法向量,如需确定最佳的变换矩阵M(R,T),以实现点云集P和点云集Q配准,则可将式(1)变换为:
(2)
式中:ni为点云qi点的法向量;(piR+T-qi)为点云pi到点云qi的一种线性转换;[(piR+T-qi)ni]2为piR+T点到qi平面距离的平方。
1.2 求解变换矩阵

(3)

(4)
由指数ex展开可知,当|x|<1时,ex≈1+x。所以,当坐标旋量‖ω‖<1时,式(4)可以表示为:
(5)
T=v
(6)
将式(5)和式(6)代入式(2),可得:
(7)

定义a=P×n,则式(2)可以重写为:
(8)
要使式(8)有最小值,则要先求取函数ε(R,T)关于ω和v参数的偏导数。当偏导数为零,即可求出参数的值。求解偏导公式为:
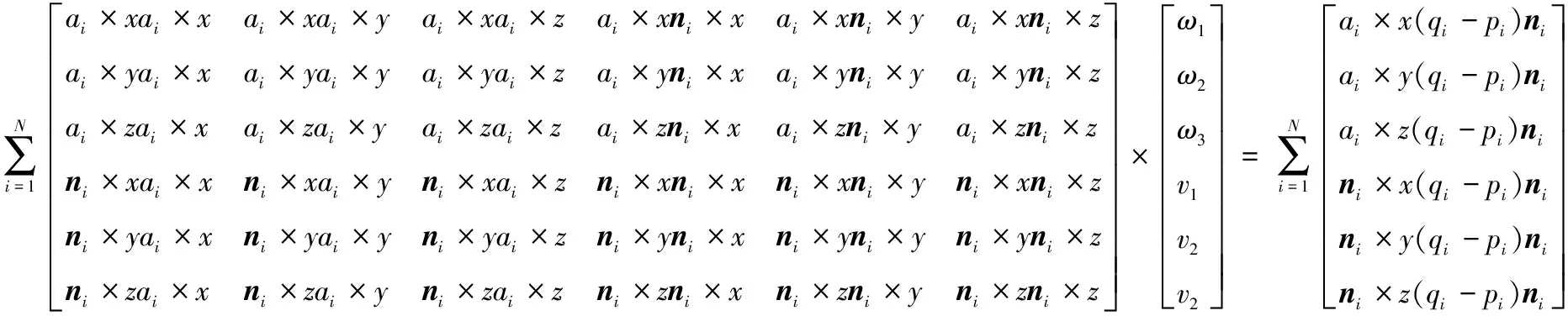
(9)
将式(9)表示为Ax=b的线性矩阵方程。其中:A为6×6的协方差矩阵,可以用已知的ai和ni表示;x为6×1的未知向量;b为6×1的向量,可以通过对应的点云对(pi,qi)和ai和ni表示。求解Ax=b的线性矩阵方程,就可以得出旋转矩阵R和平移向量T,即完成变换矩阵求解。从式(9)可知,求解变换矩阵只需要6个方程,算法易于实现,且不需要构造其他的模型函数。在LM算法中,需要构造模型函数f,并在其领域内对估计参数向量p作线性近似变换。如未能较好地构造模型函数构,将直接影响变换矩阵的求解。在SVD算法中,需要计算点云的质心,然后构造协方差矩阵。该方法计算量大,迭代次数多。从式(9)可以看出,本文方法很好地避免了上述两种算法的不足,能够快速、精确地求出变换矩阵。
1.3 点云配准
为了加快对点云对(pi,qi)最近点的搜索,采用K-D tree搜索法来寻求最近点,提高整体的点云配准速度。如前文所述,ICP算法对初始位置对齐的点云对依耐性较高。采用随机采样一致性算法(random sample consensus,RANSAC)[15]去除错误的点云,以减少计算迭代的次数,并结合本文算法来求出变换矩阵,完成点云配准。 具体的点云配准流程如图1所示。
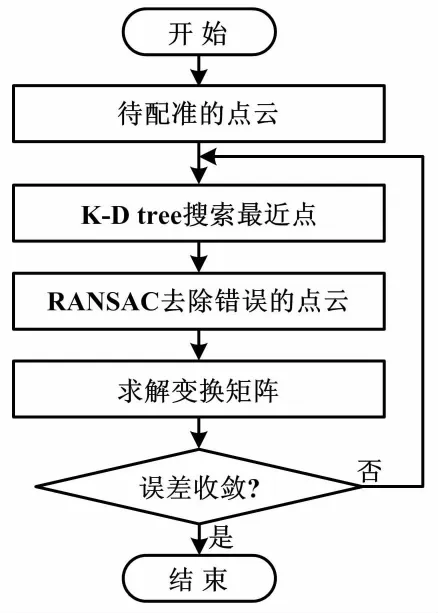
图1 点云配准流程图
2 试验结果与分析
2.1 试验评估及试验环境说明
试验从以下2个方面进行评估。
②在相同的条件下,分别与基于SVD算法的ICP算法和基于LM算法的ICP算法,比较配准的精度和配准的运行时间。
本文所有试验的计算机配置为:AMD A8 2.1 GHz CPU、4 GB内存,WIN7 64位操作系统。点云配准方法采用C++语言在Visual 2010上编程实现,并调用PCL 1.7.2版本[16]的点云库显示和保存点云。
为了验证本文方法的有效性,试验中的点云数据采用斯坦福大学提供的Bunny、Happy和Dragon数据样本。数据大小分别为:35 947个Bunny数据,32 328个Happy数据,22 998个Dragon数据。
2.2 配准的结果展示
2.2.1 Bunny配准结果
将Bunny的点云数据分别代入基于SVD算法、LM算法以及本文方法。3种算法各自迭代30次,Bunny点云配准的结果如图2所示。

图2 Bunny点云配准结果
从图2可知,本文方法和SVD算法优于LM算法。在Bunny的耳朵处,LM算法配准得不是很好,出现大量的不配准点。为了客观地表示Bunny点云配准的结果,分别对上面3种算法迭代不同的次数,比较其配准时间和配准精度,结果如表1所示。
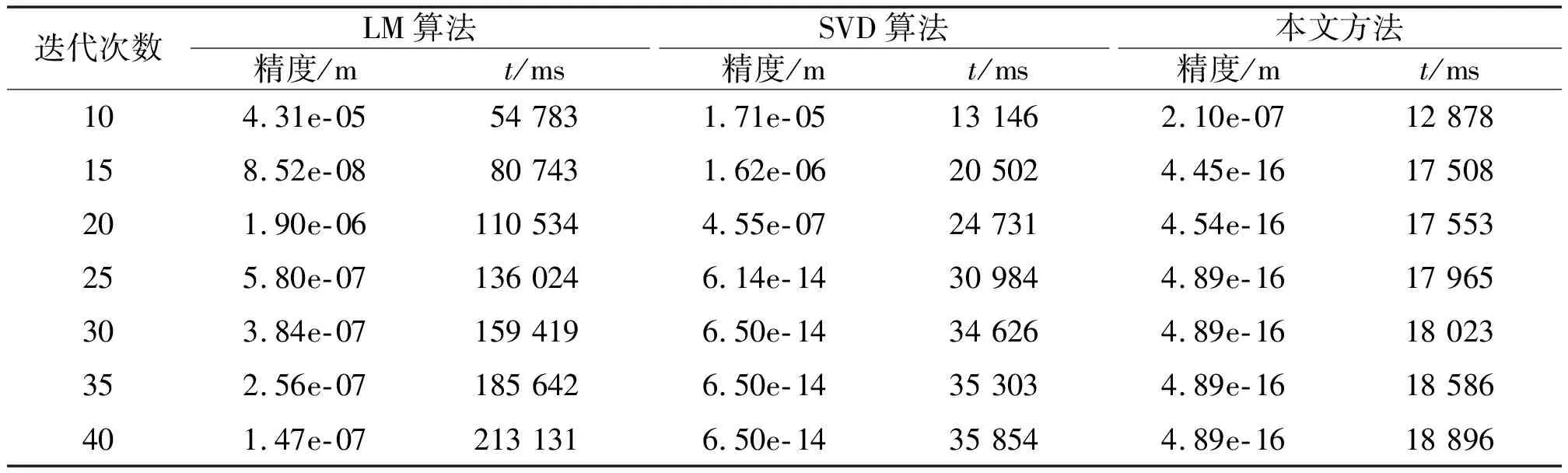
表1 Bunny点云配准精度和时间对比
从表1可以得出,本文方法配准精度和速度明显优于LM算法和SVD算法。LM算法在迭代15次时配准精度出现最高,精度数量级达到10-8;在迭代20次时精度降低,然后随着迭代次数的增加精度提高。SVD算法在迭代30次时达到局部最优,得到最佳的匹配,精度数量级达到10-14。本文方法在迭代15次时,精度数量级达就到10-16,明显超过其他2种算法的最佳配准精度数量级。在3种算法分别迭代40次时,LM算法在速度上是最慢的,本文方法最快,所用时间是SVD算法所要时间的6倍、LM算法的11倍。很明显,本文方法在速度上明显优于其他2种算法。
2.2.2 Happy配准结果
将Happy的点云数据分别代入3种算法。3种算法各自迭代30次的配准结果如图3所示。
由图3可知,本文方法和LM算法优于SVD算法。SVD算法在Happy的上部分右边处配准得不是很好。
同样地,为了客观表示Happy点云配准的结果,分别对3种算法迭代不同的次数,比较其配准时间和配准精度,结果如表2所示。
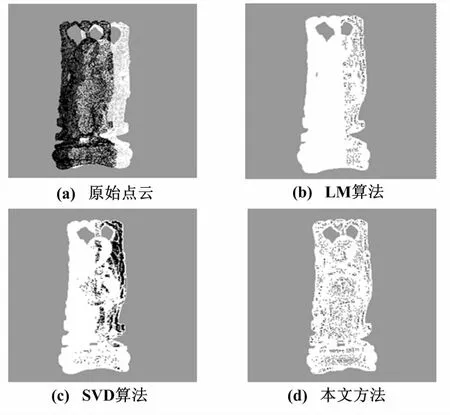
图3 Happy点云配准结果
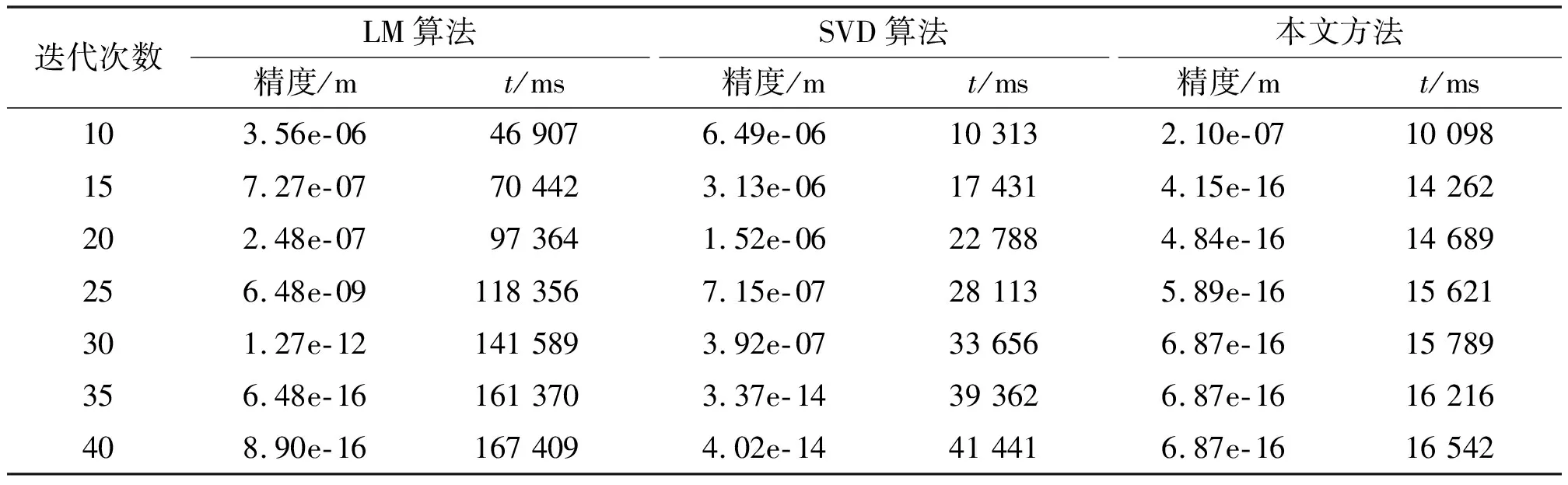
迭代次数LM算法精度/mt/msSVD算法精度/mt/ms本文方法精度/mt/ms103.56e-0646 9076.49e-0610 3132.10e-0710 098157.27e-0770 4423.13e-0617 4314.15e-1614 262202.48e-0797 3641.52e-0622 7884.84e-1614 689256.48e-09118 3567.15e-0728 1135.89e-1615 621301.27e-12141 5893.92e-0733 6566.87e-1615 789356.48e-16161 3703.37e-1439 3626.87e-1616 216408.90e-16167 4094.02e-1441 4416.87e-1616 542
由表2可知,LM算法从迭代初始次数时配准精度就高于SVD算法,在迭代40次时配准精度高于本文方法。但是,本文方法收敛速度仍然是3种算法中最快的。在迭代15次时,本文方法精度数量级达就到10-16、LM算法精度数量级为10-7、SVD算法精度数量级为10-6,证明本文方法配准精度远高于其他2种算法。在配准时间上,LM算法总大于SVD算法和本文方法。LM算法迭代10次所花时间大于SVD算法迭代40次的时间,本文方法的配准时间仍然是最小的,明显小于其他2种算法。
2.2.3 Dragon配准结果
将Dragon的点云数据分别代入3种SVD算法。3种算法各自迭代30次,Dragon点云配准结果如图4所示。
从图4可知,3种算法的配准效果都较好。同样地,为了客观表示Dragon点云配准的结果,分别采用上面3种算法迭代不同的次数,比较其配准时间和配准精度,结果如表3所示。
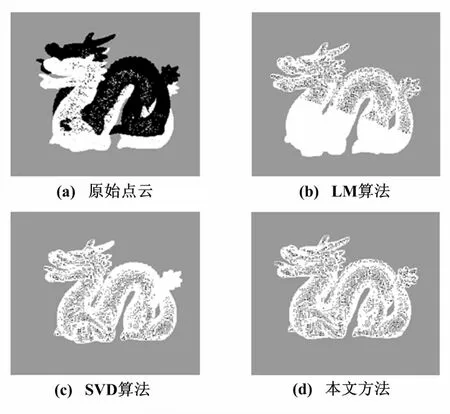
图4 Dragon点云配准结果
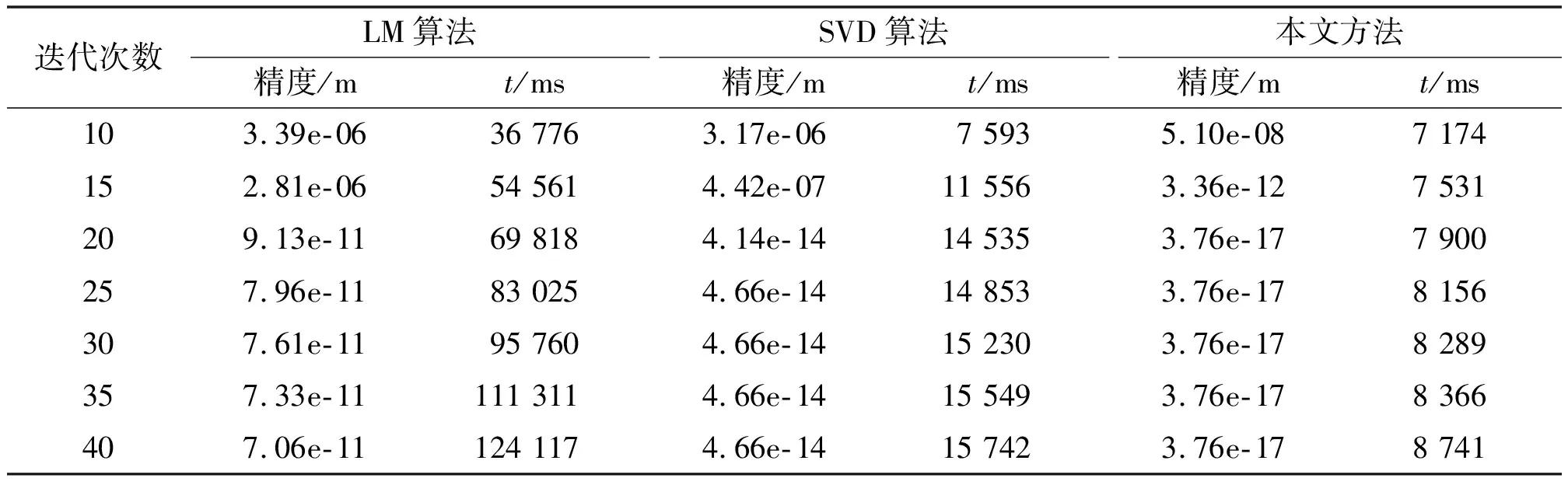
迭代次数LM算法精度/mt/msSVD算法精度/mt/ms本文方法精度/mt/ms103.39e-0636 7763.17e-067 5935.10e-087 174152.81e-0654 5614.42e-0711 5563.36e-127 531209.13e-1169 8184.14e-1414 5353.76e-177 900257.96e-1183 0254.66e-1414 8533.76e-178 156307.61e-1195 7604.66e-1415 2303.76e-178 289357.33e-11111 3114.66e-1415 5493.76e-178 366407.06e-11124 1174.66e-1415 7423.76e-178 741
由表3可知,从精度上看,LM算法是3种算法中最差的一种,在迭代次数超过25次时收敛几乎保持不变,在整过迭代过程中没有出现局部最优值; SVD算法在迭代20次时超过LM算法,在迭代25次时出现局部最优值;本文方法在迭代20次时就出现局部最优值,得到最佳的配准结果,配准精度结果为10-17,在精度数量级上超过LM算法和SVD算法。从时间上看,本文方法在配准时间仍然最少的,SVD算法次之,LM算法最多。本文方法在配准精度和速度都好于其他两种算法。
2.2.4 单片点云配准结果
在以上试验中,分别比较了3种算法对完整点云数据的配准结果。为了验证本文方法的普遍有效性,对单片非闭合的点云进行配准。数据采用了Bunny的头部,点云数据量为23 317; Happy的底座,点云数据量为6 823; Dragon的右部分,点云数据量为12 414。分别采用3种算法对以上点云数据进行处理,各自迭代30次,单片点云配准结果如图5所示。
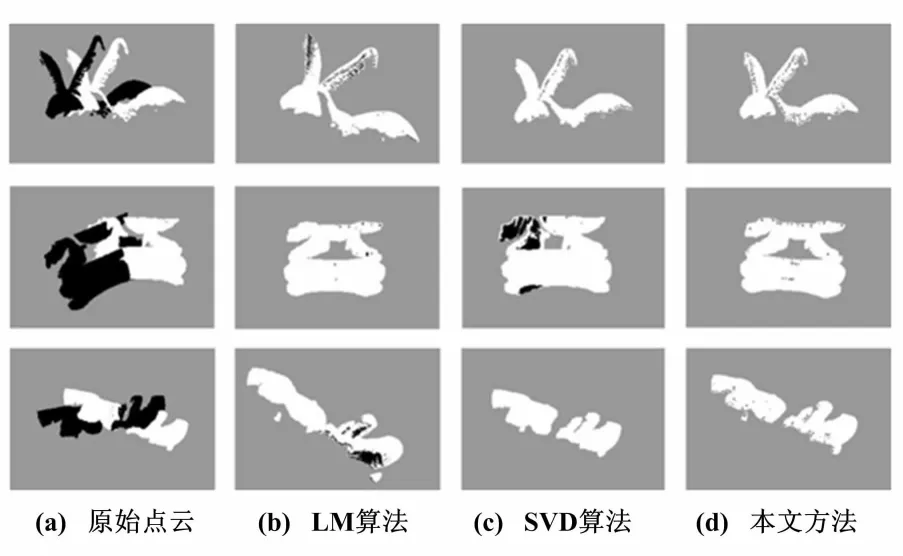
图5 单片点云配准结果
由图5可知,第1行中Bunny的头部,3种算法配准精度无明显的差别;第2行中Happy的底座,LM算法和本文方法明显优于SVD算法;第3行中Dragon的右部分腿,LM算法比本文方法和SVD算法差。为了更加精确、直观地描述3种算法的配准精度和速度,将3种算法各自迭代30次,结果如表4所示。

表4 单片点云配准精度和时间对比
由表4可知,在第1行Bunny中,LM算法在配准精度上要高于SVD算法,但时间上要远大于SVD算法,本文方法在配准精度和时间上都要优于其他两种算法;在第2行Happy中,SVD算法在配准精度和时间上都好于LM算法,本文方法是三者算法中最好的;在第3行Dragon中,LM算法在配准精度上高于SVD算法,本文方法远超LM算法和SVD算法,还是三者中最好的。从总体上来看,本文方法对单片非闭合的点云配准精度最高,精度数量级达到10-17~10-16,与闭合的点云数据几乎一致,其他2种算法在单片非闭合点云的配准上误差较大,与闭合的点云数据相差较大。
3 结束语
点云配准是点云数据处理中最重要的一步,其关键在于求解位置变换矩阵。针对目前求解变换矩阵精度不高、耗时大的问题,提出一种新的求解变换矩阵的方法;结合K-D tree来加快最近点的搜索速度,并采用RANSAC剔除错误的点云,以减少迭代的次数,最终完成点云的配准。试验结果表明,本文方法在配准精度和时间上优于LM算法和SVD算法。本文方法的精度数量级达到10-17~10-16,是其他两种算法不可达到的,由此证明了本文方法的有效性和时效性。下一步将对点云数据有噪声和点云密集程度大的情况开展研究工作。
