空间交会对接的发展历程
2018-11-17林来兴北京控制工程研究所
林来兴 (北京控制工程研究所)
1 引言
空间交会对接产生和初期蓬勃发展,完全是美苏冷战时期两国开展空间竞赛的结果。后来由于空间技术本身发展和应用需求,使其连续不断进步,发展出许多新的应用领域。半个世纪以来,全世界成功实现交会对接近500次。只有美国、俄罗斯、中国、欧洲航天局和日本独自掌握交会对接能力。现在人们开始认识到,发展交会对接技术本身不是目的而是手段,应用这种手段的空间任务和工程项目具有深远的科学意义、极大的应用价值和社会与经济效益。空间交会对接技术从出现到发展成熟,成为空间操作的重要手段,回忆这50年来空间交会对接技术发展和辉煌成果分为过去和现在,前30年划为过去,后20年定为现在(大约2001—2020年)。
2 交会对接的过去
试验研究阶段
(1)双子座号飞船
美国为在空间竞赛中赶超苏联,决定实施“阿波罗”计划,为此产生交会对接概念和需要。美国为实施“阿波罗”计划必须要先在近地轨道成功验证空间交会对接技术,从而产生双子座号(Gemini)飞船。1966年3月16日,美国双子座-8飞船与阿金纳号目标飞行器在航天员参与下实现了世界上首次交会对接。对接机构很简单,由“锥”与“环”组成,前者装在双子座号飞船的通道口上,后者装在阿金纳号飞行器尾部。测量系统为交会雷达,另有光学瞄准镜,用于近距离测量,提供航天员使用。双子座号飞船为“阿波罗”计划的交会对接完成了技术准备。
(2)初期联盟号飞船
在美国之后,苏联于1967年10月30日用宇宙-186和宇宙-188不载人联盟号飞船完成了首次自动交会对接。1969年联盟-4和联盟-5飞船实现了载人交会对接。对接机构为“杆-锥”式,对接机构当中没有通道,航天员必须从舱外进入另一艘飞船。不久经过改进后,把“杆-锥”式对接机构转动90°,航天员可以从舱内通过。联盟号飞船一开始就以自动为主、手动为辅,由于系统复杂,技术难度大,一度影响了研制进度,但是经过多次飞行试验与改进,逐渐实用可靠,一直使用到现在。
技术发展阶段
(1)阿波罗号载人登月飞船
阿波罗号登月飞船每次需要进行两次交会对接,是美国发展空间交会对接的原动力。阿波罗号飞船采用的对接机构为“杆-锥”型结构,测量敏感器在交会阶段是依靠微波雷达,接近和对接阶段依靠航天员目视目标器,由手控操作来完成对接。交会对接技术对完成“阿波罗”登月计划起到了关键作用。
(2)阿波罗号与联盟号飞船对接
1975年7月,美国阿波罗号飞船与苏联联盟号飞船在空间实现交会对接。由于阿波罗号飞船与联盟号飞船交会对接测量系统不同,飞船增加了应答机、光点标志等设备。先以阿波罗号飞船作为追踪器、联盟号飞船作为目标器,两艘飞船顺利实现交会对接,然后分开,再以联盟号飞船作为追踪器、阿波罗号飞船作为目标器又进行了第二次交会对接。这次空间握手意义非常大,交会对接技术与操作实现了跨国兼容和国际化,特别是异体同构周边对接机构可以说是个创造性的进步,该机构至今还在使用。

阿波罗号飞船与联盟号飞船交会对接
(3)礼炮号空间站
苏联取消登月计划后,主要以空间站为需求牵引发展交会对接技术,先后建立了礼炮号与和平号空间站。礼炮号交会对接测量系统采用“针”系统,对接机构全部采用“杆-锥”结构型式。在这段时间苏联也出现了多次交会对接失败,但是不断排除故障,持续改进设计,使交会对接技术走上成熟。
成熟应用阶段
经过近20年的空间飞行试验和持续的设计改进,交会对接技术逐渐成熟起来。
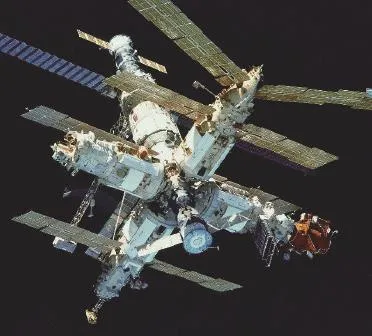
和平号空间站外形图
(1)和平号空间站
苏联1986年成功发射和平号空间站核心舱和对接舱。对接舱有6个对接口,这种多个对接口与对接方式是一个重大技术创新。对接机构有“杆-锥”型和异体同构型两种,敏感器从最开始使用的老式射频敏感器系统到1989年改为“航向”雷达测量系统,可测量相对距离与姿态,测量系统组成较齐全,作用距离从数百千米一直到对接。
(2)航天飞机
美国航天飞机于1980年首次发射成功,到了20世纪90年代,航天飞机开始具备空间交会/捕获和对接的能力。对接机构采用异体同构周边改进型,测量系统多为交会雷达,近距离采用光学敏感器和轻型摄像机。姿态控制基本上为自动,轨道控制多数为航天员手动,加上航天员目视,保证了对接的安全性和可靠性。进入21世纪后,航天飞机与国际空间站交会对接近距离还采用了激光雷达。

航天飞机与和平号空间站对接
(3)日本工程试验技术-7卫星自主交会对接
工程试验技术-7卫星的出现标志着交会对接技术由大型航天器向中小卫星过渡。工程试验技术-7卫星由追踪星(2.5t)和目标星(0.5t)组成,入轨后分离,成功进行了多次不同距离交会对接。敏感器由交会雷达、差分GPS和激光雷达与接近光学敏感器组成,对接机构采用“撞锁-手柄”结构,质量轻、结构简单,适用无人对接。

工程试验技术-7卫星外形图
过去交会对接技术发展小结
1)过去近30年来,交会对接已经从产生、研究、试验与技术发展阶段,逐步走向成熟和应用阶段,同时也成为一项常规空间操作手段。美苏两国开展空间竞赛,极大推动交会对接技术快速发展。
2)交会对接初期美苏两国走了不同的发展道路:美国以手动为主与自动为辅,苏联以自动为主手动为辅,其原因是:美国以“阿波罗”载人飞船为主要目标,苏联的东方号飞船以侦察为主要目标。其结果后者因技术复杂,导致发展缓慢。对载人航天器来说:姿态控制大多数为自动,对轨道控制远距离采用自动或手动,逼近和对接阶段都采用航天员手动,这种控制模式是正确的。
3)采用舱段式结构、6个对接口舱段,以及载人与运货飞船分开发展,应该作为当前空间站最佳结构形式。
3 交会对接的现在
现在交会对接全面大量应用在大型航天器,例如各种空间站组装、日常载人和运送货物,同时也向无人小卫星交会对接枝术发展,典型实例如下。
国际空间站(ISS)
空间站为桁架与舱段式混合的结构模式,国际空间站交会对接测量系统没有统一规定,基本上按各国现有敏感器作为目标器空间站给予应有配合,例如俄罗斯使用Kurs雷达测量系统,可以从几百公里到对接口,但是质量与功耗很大,国际空间站作为目标器也同样有此设置。国际空间站对接机构也是各式各样,根据追踪器要求,目标器作相应配合。到现在为止,粗略统计国际空间站己有100多次有人无人交会对接,其技术水平和可靠性已经达到较高水平。
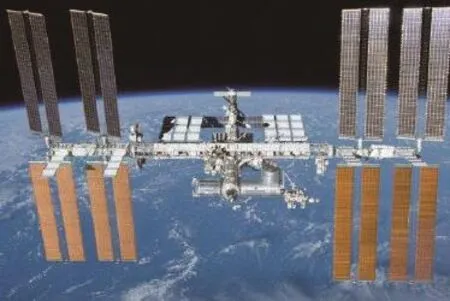
国际空间站
小卫星无人交会对接
现代小卫星问世至今已有30多年,技术上飞快发展,应用领域全面展开,发射量逐年递增,现在每年发射量占全球总发射量1/2以上。发展无人小卫星交会对接,对其应用将产生很大影响。
XXS-10和XSS-11微小卫星是美国空军研究实验室负责研制,2003年和2005年分别进行空间飞行试验,内容包括小卫星对非合作目标交会、逼近、停留、绕飞,以及自动与手控等技术。
美国蒂瓦克公司(TYVAK)在美国国家航空航天局资助下开发研制两颗3U立方体卫星,计划近期发射,进行交会对接技术空间飞行演示。3U立方体卫星带有冷气推进系统,空间交会对接系统由追踪器和目标器组成,追踪器和目标器均为3U立方体卫星结构,质量和功耗比以前降低2~3个数量级。
欧洲航天局(ESA)的通用支持技术演示卫星-3(Proba-3)计划2019年在轨进行双星空间交会与停留试验。两颗卫星都装有推力器,相对位置精度控制在毫米级,在受到太阳辐射压等干扰时,两颗卫星可以迅速自主响应,验证自主控制。

XSS-10卫星外形结构
现在交会对接技术成就小结
1)超大型国际空间站具有20多个各式各样舱段和对接/停泊端口。至今已安全运行十多年,成功实现百余次与各种类型的飞行器交会对接,交会对接应用和发展已达到非常高的水平。
2)近10年来实现交会对接成功率很高,这得益于测量设备与对接机构技术全面过关,还要按空间环境条件在地面上摸拟,经过多自由度全尺寸半物理仿真实验通过才能上天。
3)根据空间技术发展和应用急需,今后重点应发展无人小卫星与非合作目标的交会对接技术,适当研究深空交会对接技术特点,以及大型空间结构所要求交会、保持-停靠、捕获等技术。
4 结论
50年来,交会对接已经从研究、试验与技术发展阶段,逐步把一个复杂多自由度(多变量)控制,变成现在技术成熟、系统可靠的常规空间操作,但是它们绝大部分都停留在大型载人航天器项目,这些项目投资大,研制周期长,技术复杂,仅有长远的效益。今后应着力发展那些应用领域广,经济效益大,而且具有很高潜在军用价值的小卫星和非合作目标的交会对接技术。