一种无人机转弯航路平滑算法及实现
2018-11-14四川九洲空管科技有限责任公司
四川九洲空管科技有限责任公司 项 梅
四川九洲电器集团有限责任公司 段刘刚
随着无人机的迅速发展,考虑到无人机受飞行转弯半径约束,航路中可能存在不可飞尖角,造成无人机不能按照预定的航路飞行,可能威胁到无人机自身飞行安全,迫切需要寻找一种对粗略规划的航路的优化处理平滑算法设计,使航路满足无人机机动稳定性要求,本文主要通过坐标转换法、几何学方法及无人机飞行性能相结合的设计思路,提出了一种无人机转弯航路平滑算法,最后将所研究的算法应用于无人机的航路转弯平滑规划仿真,仿真结果表明所研究的转弯航路平滑算法是有效的。
引言:飞行器航路规划则就是指在综合考虑飞行时间、飞行器机动性能、飞行环境条件等约束因素下,寻找一条可以使飞行器从起点到达目标点的可行或者最优的飞行轨迹;通过粗略航路点直接相连的航路规划,难免会存在一些“弯路”和“折线”,这些“弯路”和“折线”不但没有降低路径的威胁成本,相反还增加了航迹的燃油成本,此外,由于无人飞行器自身物理条件的限制(如最大拐弯角、曲率半径等),无人机不能完全按照生成的路径飞行。因此需对生成的路径进行优化平滑处理,本文主要针对飞行转弯进行模型平滑处理,直线飞行不再研究范畴。
目前,无人机航路规划方法包括经典规划有梯度法、样条插值法、非线性规划法、最优控制法、动态规划、智能规划方法有图论、A* 搜索算法、神经网络法、模拟退火法以及群智能优化等算法,航路规划转弯平滑方法的研究,可以应用于无人机、民航等转弯航路设计,改善航空运行安全,提高运行效益,降低运行成本,可以作为无人机航路规划各算法的思路补充。
1.工作原理及航路规划平滑算法模型建立
实现航路规划所提供的航路点数据与规划结果数据均要求表示为经度、纬度,使用WGS-84 坐标参考系。假如航路点A到航路点B,要求转弯半径R(取值范围与无人机自身性能有关),优化从A到B的航路点使无人机机动更加稳定,正东方向为X轴,正北方向为Y轴,X轴与Y 轴单位为km。无人机转弯坐标系如图1,该航路规划主要考虑经、纬度,高度进行单独规划,不属于本软件设计的考虑范围,重点针对转弯飞行进行航路点平滑处理。
首先坐标转换,输入起始航路点为坐标原点,根据转弯半径,建立圆的方程,从左转和右转可以建立两个方程,计算两个圆的圆心坐标,根据左转和右转,求出对应的圆心坐标,加上初始、结束航路点坐标信息,可以补充平滑处理转弯飞行的航路点信息,具体工作流程如图2所示。

图1 无人机转弯坐标

图2 航路点平滑算法工作原理流程
2.仿真实例分析
本方案采用MATLAB进行简单仿真并进行了基于转弯航路平滑模型的真实飞行数据偏差实验。
R=100KM,f0=101.4346;qq0=31.2577;ff1=101.3356;qq1=31.1566;
取20个航路点的情况如图3所示。
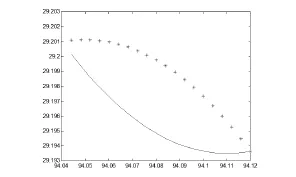
图3 航路点平滑规划
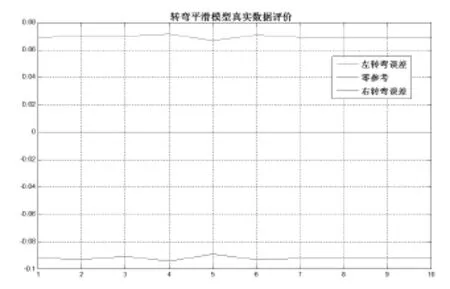
图4 民航真实转弯平滑模型数据评估
从仿真图可以看出,不考虑物理障碍物等因素影响,从A航路点到B航路点,转弯半径已知的情况下,完全可以平滑设计两个转弯曲线,具体为左转弯和右转弯两种情况(见图4)。
A航路点坐标(94.1199111,qq0=29.193641666);B航路点坐标(94.0401888888,29.20097777),转弯半径R=28.1504海里。
左转弯及右转弯偏差为:

从民航转弯飞行中,基于转弯平滑模型,通过真实的转弯飞行数据,经过MATLAB仿真计算,转弯偏差小于0.1海里。
3.结论
综上所述,可以看出,基于几何算法和飞行性能的转弯飞行平滑模型技术,可以作为其他航路规划算法的有利补充,完全可以与其他方法进行结合处理,该方法也可以作为无人机、民航等的转弯飞行评估,通过仿真可以看出,该转弯平滑算法可以进行转弯航路点规划也可以作为转弯飞行评估的基础,该算法具有一定的理论参考价值。
